直流电机调速-第十四周
直流电机调速报告
原始控制器只含比例环节。我们增加积分和微分环节,设计成PID控制器。代码如下:
algorithm error := command.signal[1] - feedback.signal[1]; i_error := i_error+ error; d_error := error - pre(error); pout := Kp * error + Ki * i_error + Kd * d_error;
按照比例环节、微分化解、积分环节的顺序调整参数值。最终选择参数如下:
parameter Real Kp=6; parameter Real Ki=0.1; parameter Real Kd=20;
得到结果(0-5s)如下:
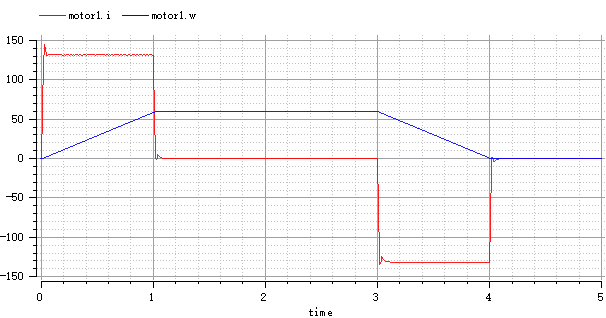
计算响应的动态参数(以0-1.1s的结果更易观察):

计算得到超调量Mp约为22%,响应时间约为0.12s;响应性能较好。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号