
[ACM_几何] Fishnet
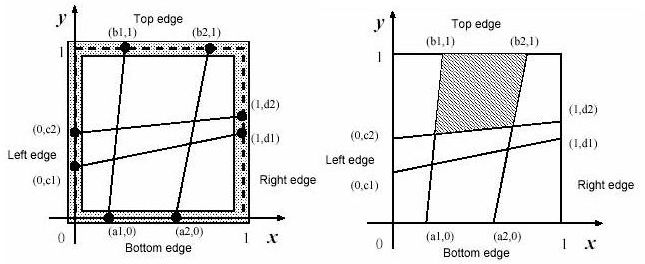
本题大意:有一个1X1的矩形,每边按照从小到大的顺序给n个点如图,然后对应连线将举行划分,求最大面积。
解题思路:暴力算出各点,求出各面积


#include<iostream> #include<cmath> #include<string.h> #include<string> #include<stdio.h> #include<algorithm> #include<iomanip> using namespace std; #define eps 0.0000000001 #define PI acos(-1.0) //点和向量 struct Point{ double x,y; Point(double x=0,double y=0):x(x),y(y){} }; typedef Point Vector; Vector operator+(Vector a,Vector b){return Vector(a.x+b.x,a.y+b.y);} Vector operator-(Vector a,Vector b){return Vector(a.x-b.x,a.y-b.y);} Vector operator*(Vector a,double p){return Vector(a.x*p,a.y*p);} Vector operator/(Vector a,double p){return Vector(a.x/p,a.y/p);} bool operator<(const Vector& a,const Vector& b){return a.x<b.x||(a.x==b.x && a.y<b.y);} int dcmp(double x){ if(fabs(x)<eps)return 0; else return x<0 ? -1:1; } bool operator==(const Point& a,const Point& b){ return dcmp(a.x-b.x)==0 && dcmp(a.y-b.y)==0; } double Dot(Vector A,Vector B){return A.x*B.x+A.y*B.y;}//向量点积 double Length(Vector A){return sqrt(Dot(A,A));}//向量模长 double Angle(Vector A,Vector B){return acos(Dot(A,B)/Length(A)/Length(B));}//向量夹角 double Cross(Vector A,Vector B){return A.x*B.y-A.y*B.x;} double Area2(Point A,Point B,Point C){return Cross(B-A,C-A);}//三角形面积的2倍 //绕起点逆时针旋转rad度 Vector Rotate(Vector A,double rad){ return Vector(A.x*cos(rad)-A.y*sin(rad),A.x*sin(rad)+A.y*cos(rad)); } double torad(double jiao){return jiao/180*PI;}//角度转弧度 double tojiao(double ang){return ang/PI*180;}//弧度转角度 //单位法向量 Vector Normal(Vector A){ double L=Length(A); return Vector(-A.y/L,A.x/L); } //点和直线 struct Line{ Point P;//直线上任意一点 Vector v;//方向向量,他的左边对应的就是半平面 double ang;//极角,即从x正半轴旋转到向量v所需的角(弧度) Line(){} Line(Point p,Vector v):P(p),v(v){ang=atan2(v.y,v.x);} bool operator<(const Line& L)const { return ang<L.ang; } }; //计算直线P+tv和Q+tw的交点(计算前必须确保有唯一交点)即:Cross(v,w)非0 Point GetLineIntersection(Point P,Vector v,Point Q,Vector w){ Vector u=P-Q; double t=Cross(w,u)/Cross(v,w); return P+v*t; } //点到直线距离(dis between point P and line AB) double DistanceToLine(Point P,Point A,Point B){ Vector v1=B-A , v2=P-A; return fabs(Cross(v1,v2))/Length(v1); } //dis between point P and segment AB double DistancetoSegment(Point P,Point A,Point B){ if(A==B)return Length(P-A); Vector v1=B-A,v2=P-A,v3=P-B; if(dcmp(Dot(v1,v2))<0)return Length(v2); else if(dcmp(Dot(v1,v3))>0)return Length(v3); else return fabs(Cross(v1,v2))/Length(v1); } //point P on line AB 投影点 Point GetLineProjection(Point P,Point A,Point B){ Vector v=B-A; return A+v*(Dot(v,P-A)/Dot(v,v)); } //线段规范相交(只有一个且不在端点)每条线段两端都在另一条两侧,(叉积符号不同) bool SegmentProperIntersection(Point a1,Point a2,Point b1,Point b2){ double c1=Cross(a2-a1,b1-a1),c2=Cross(a2-a1,b2-a1), c3=Cross(b2-b1,a1-b1),c4=Cross(b2-b1,a2-b1); return dcmp(c1)*dcmp(c2)<0 && dcmp(c3)*dcmp(c4)<0; } //判断点P是否在线段AB上 bool OnSegment(Point p,Point a1,Point a2){ return dcmp(Cross(a1-p,a2-p))==0 && dcmp(Dot(a1-p,a2-p))<0; } //多边形的面积(可以是非凸多边形) double PolygonArea(Point* p,int n){ double area=0; for(int i=1;i<n-1;i++) area+=Cross(p[i]-p[0],p[i+1]-p[0]); return area/2; } //点p在有向直线左边,上面不算 bool OnLeft(Line L,Point p){ return Cross(L.v,p-L.P)>0; } double ok(double x,double y,double d,double z){ double f=fabs(d*(1/tan(acos(z/y))+1/tan(acos(z/x))))-z; if(fabs(f)<1e-4)return 0; else return f; } //计算凸包输入点数组p,个数n,输出点数组ch,返回凸包定点数 //输入不能有重复,完成后输入点顺序被破坏 //如果不希望凸包的边上有输入点,把两个<=改成< //精度要求高时,建议用dcmp比较 //基于水平的Andrew算法-->1、点排序2、删除重复的然后把前两个放进凸包 //3、从第三个往后当新点在凸包前进左边时继续,否则一次删除最近加入的点,直到新点在左边 int ConVexHull(Point* p,int n,Point*ch){ sort(p,p+n); int m=0; for(int i=0;i<n;i++){//下凸包 while(m>1 && Cross(ch[m-1]-ch[m-2],p[i]-ch[m-2])<=0)m--; ch[m++]=p[i]; } int k=m; for(int i=n-2;i>=0;i--){//上凸包 while(m>k && Cross(ch[m-1]-ch[m-2],p[i]-ch[m-2])<=0)m--; ch[m++]=p[i]; } if(n>1)m--; return m; } int main(){ Point point[33][33]; Point a[33],b[33],c[33],d[33]; for(int n;cin>>n&&n;){ point[0][0].x=0; point[0][0].y=0; for(int i=0;i<n;i++){ cin>>a[i].x; a[i].y=0; point[0][i+1]=a[i]; } point[n+1][n+1].x=1; point[n+1][n+1].y=1; for(int i=0;i<n;i++){ cin>>b[i].x; b[i].y=1; point[n+1][i+1]=b[i]; } point[n+1][0].x=0; point[n+1][0].y=1; for(int i=0;i<n;i++){ cin>>c[i].y; c[i].x=0; point[i+1][0]=c[i]; } point[0][n+1].x=1; point[0][n+1].y=0; for(int i=0;i<n;i++){ cin>>d[i].y; d[i].x=1; point[i+1][n+1]=d[i]; } for(int i=0;i<n;i++){ for(int j=0;j<n;j++){ point[i+1][j+1]=GetLineIntersection(c[i],d[i]-c[i],a[j],b[j]-a[j]); } } Point four[4]; double max=-1,area; for(int i=0;i<=n;i++){ for(int j=0;j<=n+1;j++){ four[0]=point[i][j]; four[1]=point[i][j+1]; four[2]=point[i+1][j+1]; four[3]=point[i+1][j]; area=PolygonArea(four,4); if(area>max)max=area; } } cout<<fixed<<max<<'\n'; }return 0; }
