

Transformer
1.介绍
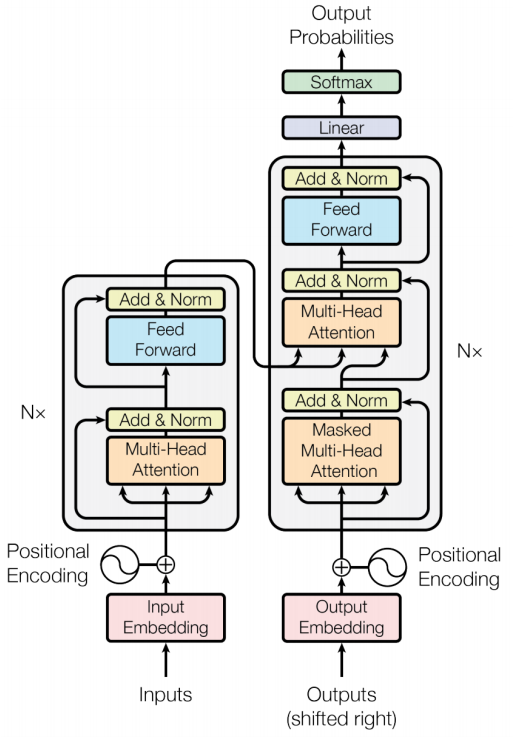
Transformer网络架构架构由 Ashish Vaswani 等人在 Attention Is All You Need一文中提出,并用于机器翻译任务,和以往网络架构有所区别的是,该网络架构中,编码器和解码器没有采用 RNN 或 CNN 等网络架构,而是采用完全依赖于注意力机制的架构。网络架构如下所示:
Transformer改进了RNN被人诟病的训练慢的特点,利用self-attention可以实现快速并行。
下面的章节会详细介绍Transformer的各个组成部分。
2.Transformer直观认识
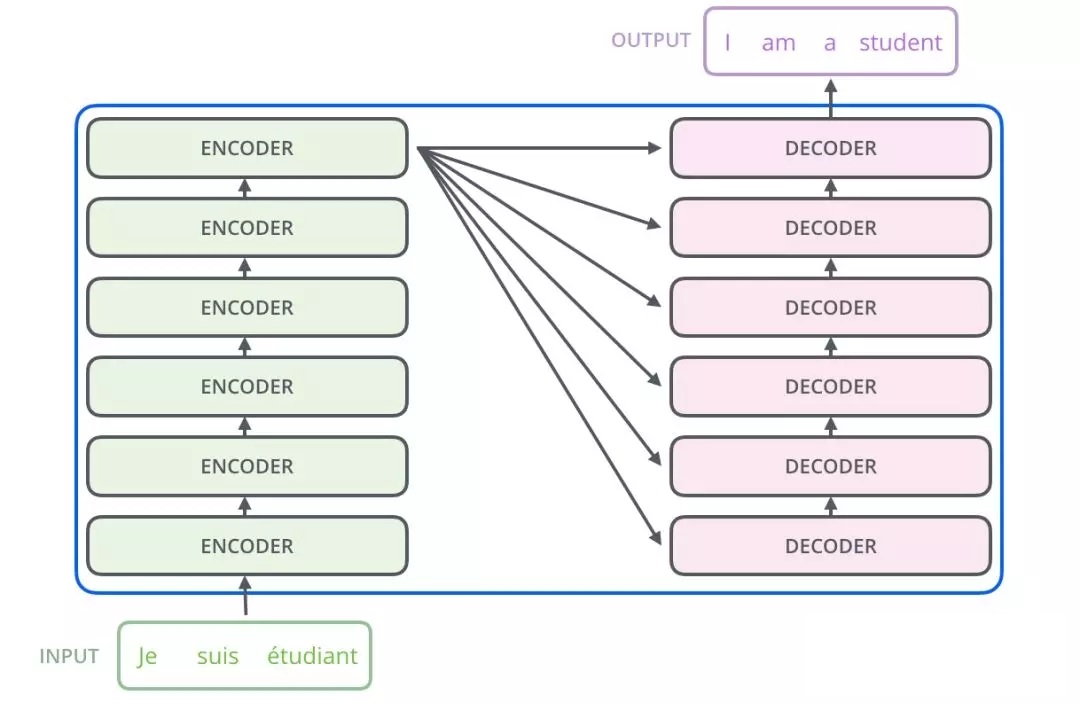
Transformer主要由encoder和decoder两部分组成。在Transformer的论文中,encoder和decoder均由6个encoder layer和decoder layer组成,通常我们称之为encoder block。
每一个encoder和decoder的内部简版结构如下图
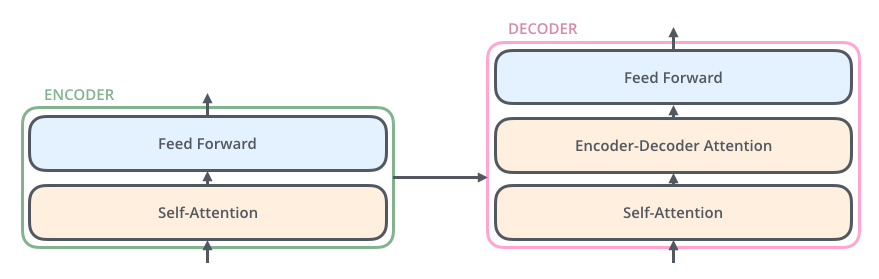
对于encoder,包含两层,一个self-attention层和一个前馈神经网络,self-attention能帮助当前节点不仅仅只关注当前的词,从而能获取到上下文的语义。
decoder也包含encoder提到的两层网络,但是在这两层中间还有一层attention层,帮助当前节点获取到当前需要关注的重点内容。
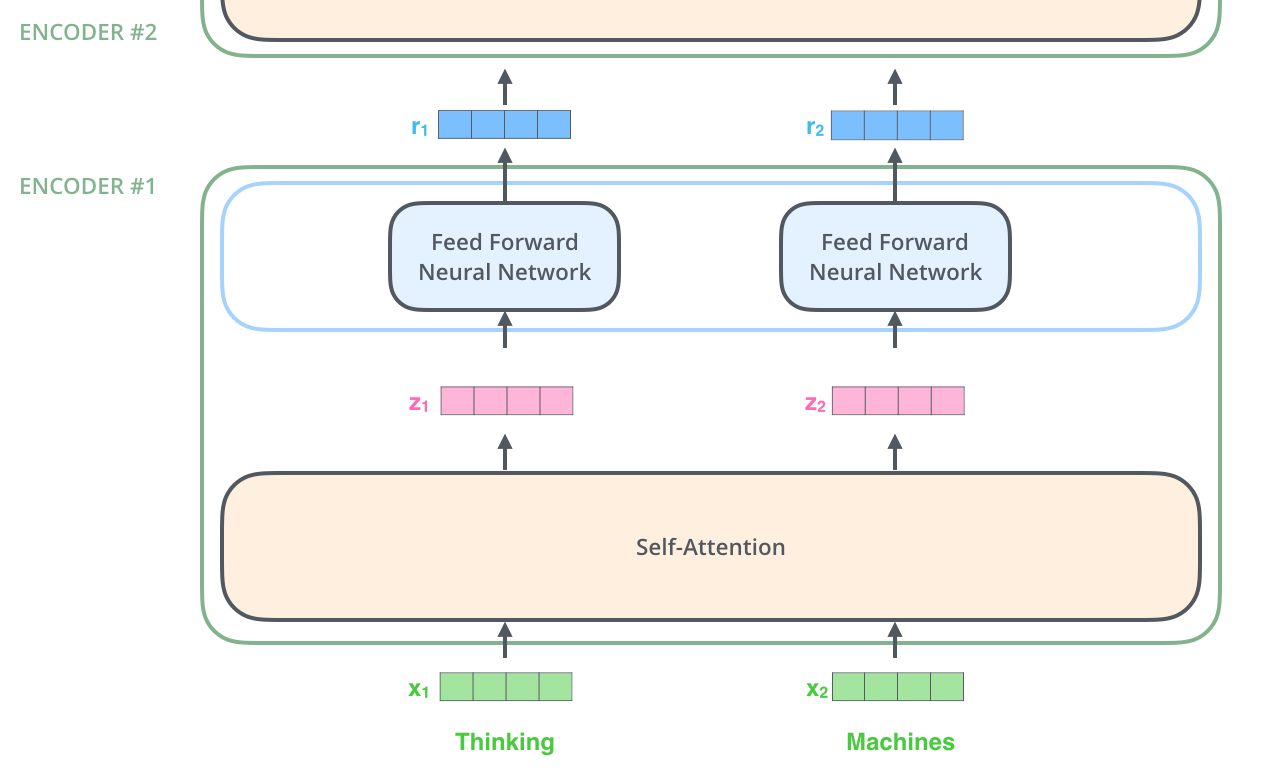
首先,模型需要对输入的数据进行一个embedding操作,enmbedding结束之后,输入到encoder层,self-attention处理完数据后把数据送给前馈神经网络,前馈神经网络的计算可以并行,得到的输出会输入到下一个encoder。
3. Transformer的结构
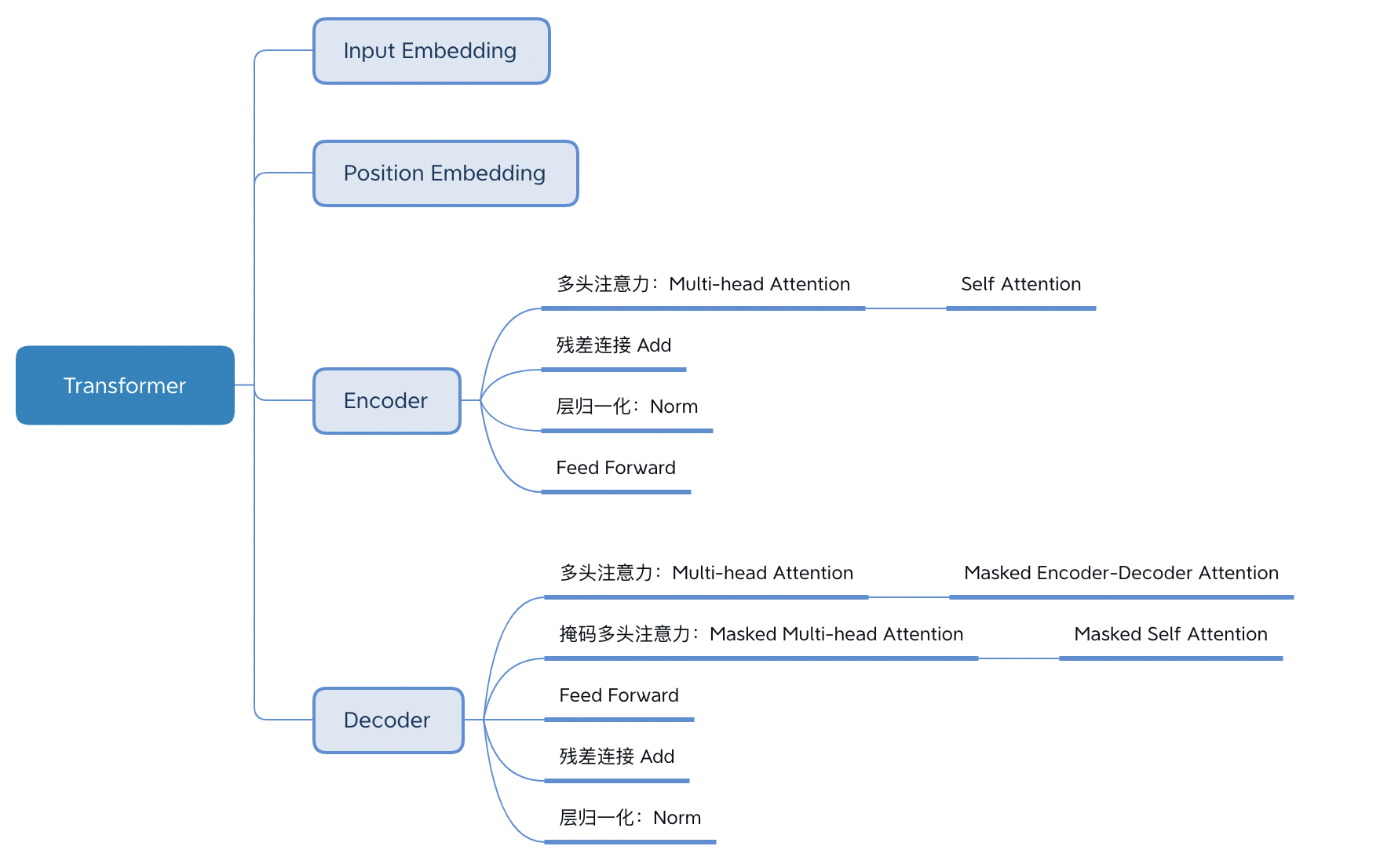
Transformer的结构解析出来如下图表示,包括Input Embedding, Position Embedding, Encoder, Decoder。
3.1 Embedding
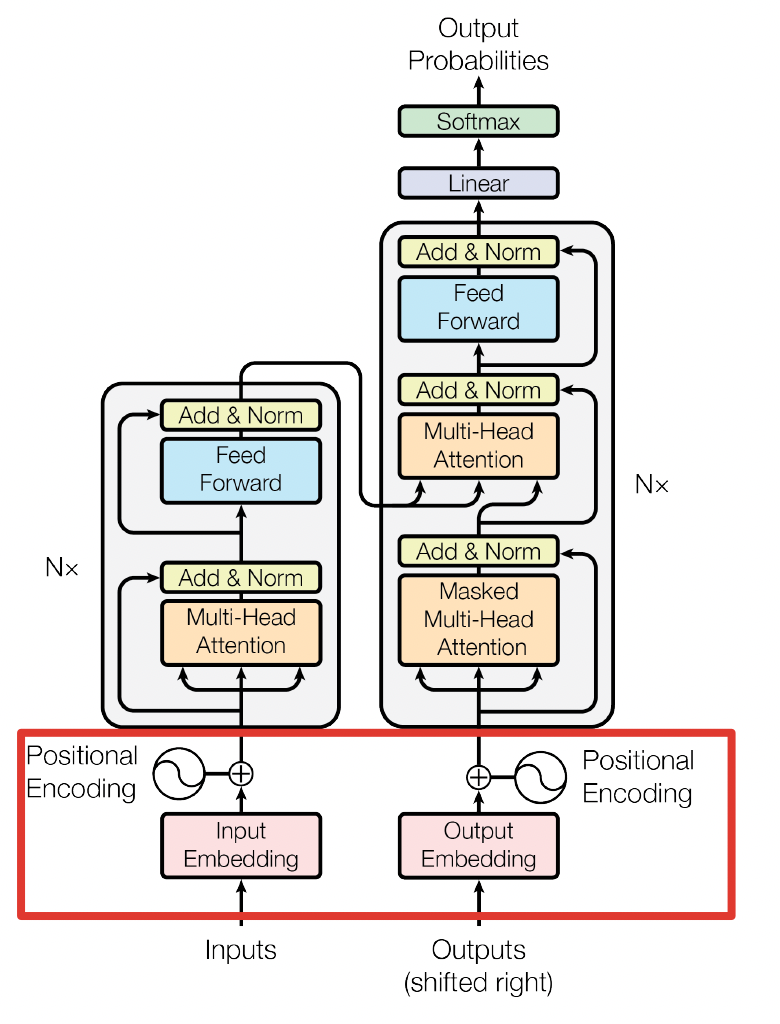
字向量与位置编码的公式表示如下:
3.1.1 Input Embedding
可以将Input Embedding看作是一个 lookup table,对于每个 word,进行 word embedding 就相当于一个lookup操作,查出一个对应结果。
3.1.2 Position Encoding
Transformer模型中还缺少一种解释输入序列中单词顺序的方法。为了处理这个问题,transformer给encoder层和decoder层的输入添加了一个额外的向量Positional Encoding,维度和embedding的维度一样,这个向量采用了一种很独特的方法来让模型学习到这个值,这个向量能决定当前词的位置,或者说在一个句子中不同的词之间的距离。这个位置向量的具体计算方法有很多种,论文中的计算方法如下
其中pos是指当前词在句子中的位置,i是指向量中每个值的index,可以看出,
- 在偶数位置,使用正弦编码,
- 在奇数位置,使用余弦编码.
3.2 Encoder
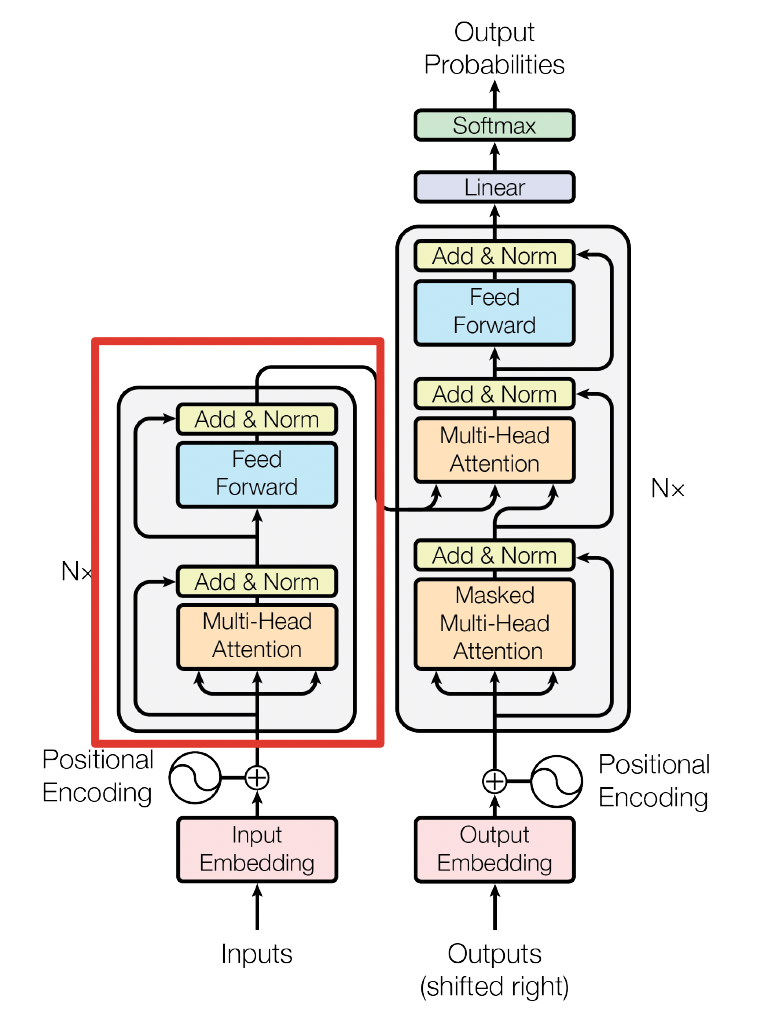
用公式把一个Transformer Encoder block 的计算过程整理一下
- 自注意力机制
- self-attention 残差连接与 Layer Normalization
- FeedForward,其实就是两层线性映射并用激活函数激活,比如说RELU
- FeedForward 残差连接与 Layer Normalization
其中:\(X_{hidden} \in R^{{batch\_size}*{seq\_len}*{embed\_dim}}\)
3.2.1 自注意力机制
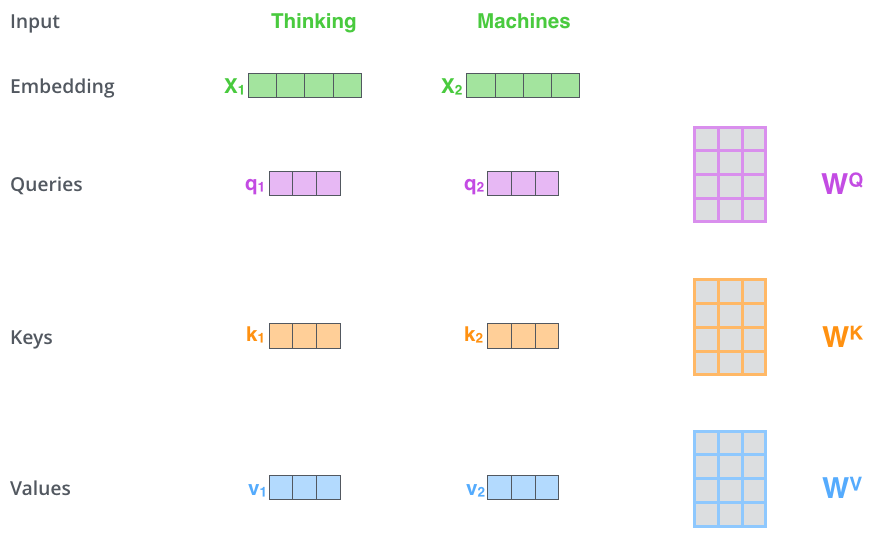
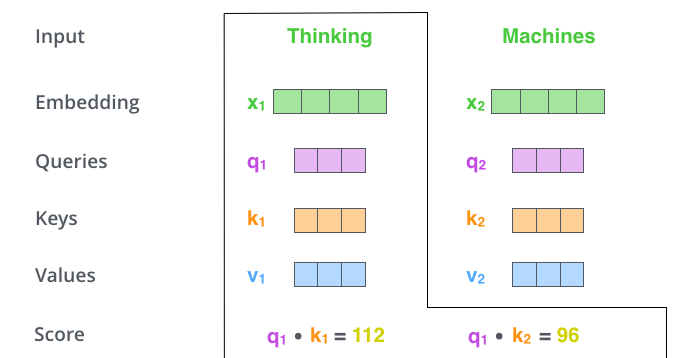
- 首先,自注意力机制(self-attention)会计算出三个新的向量,在论文中,向量的维度是512维,我们把这三个向量分别称为Query、Key、Value,这三个向量是用embedding向量与一个矩阵相乘得到的结果,这个矩阵是随机初始化的,维度为(512,64)注意第一个维度需要和embedding的维度一样,其值在反向传播的过程中会一直进行更新,得到的这三个向量的维度是64低于embedding维度的。
-
计算self-attention的分数值,该分数值决定了当我们在某个位置encode一个词时,对输入句子的其他部分的关注程度。这个分数值的计算方法是Query与Key做点乘,以下图为例,首先我们需要针对Thinking这个词,计算出其他词对于该词的一个分数值,首先是针对于自己本身即q1·k1,然后是针对于第二个词即q1·k2
-
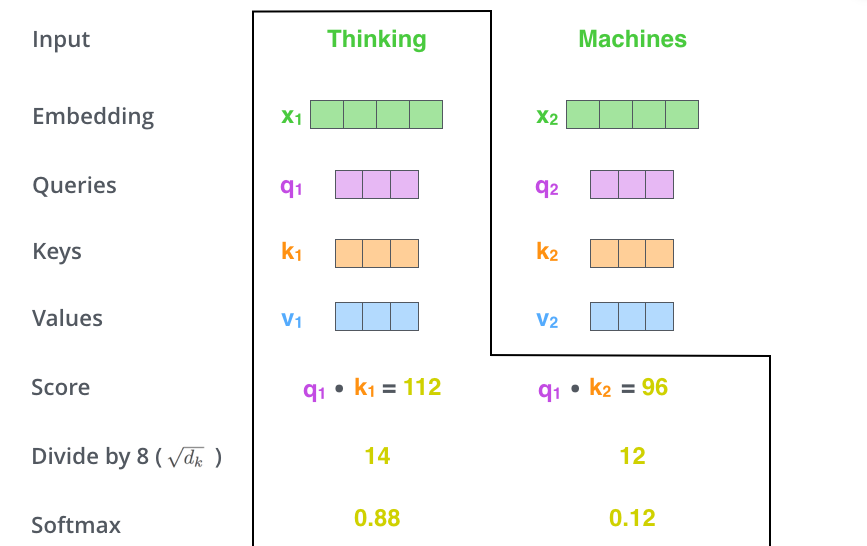
接下来,把点乘的结果除以一个常数,这里我们除以8,这个值一般是采用上文提到的矩阵的第一个维度的开方即64的开方8,当然也可以选择其他的值,然后把得到的结果做一个softmax的计算。得到的结果即是每个词对于当前位置的词的相关性大小,当然,当前位置的词相关性肯定会会很大
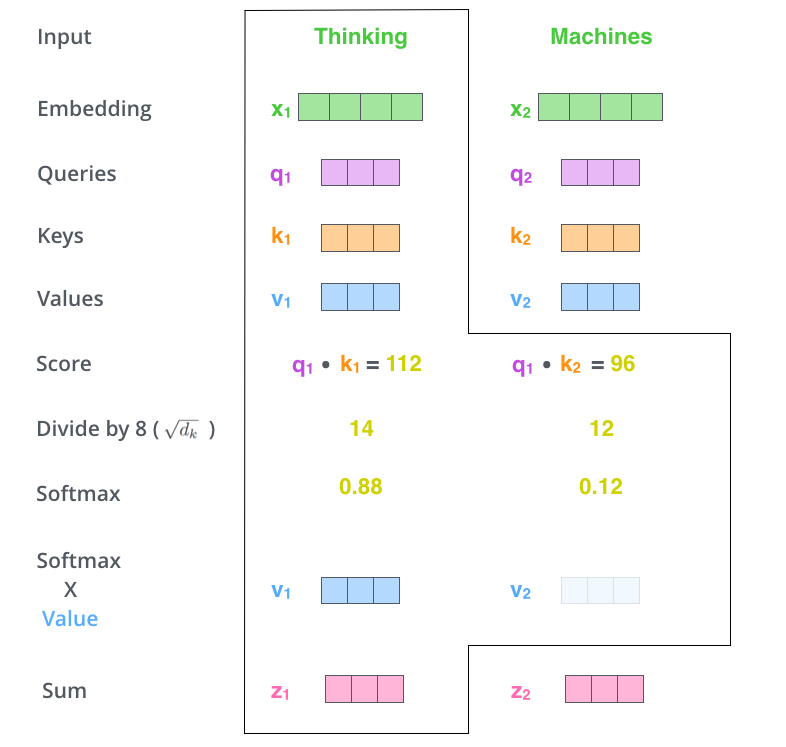
- 下一步就是把Value和softmax得到的值进行相乘,并相加,得到的结果即是self-attetion在当前节点的值。
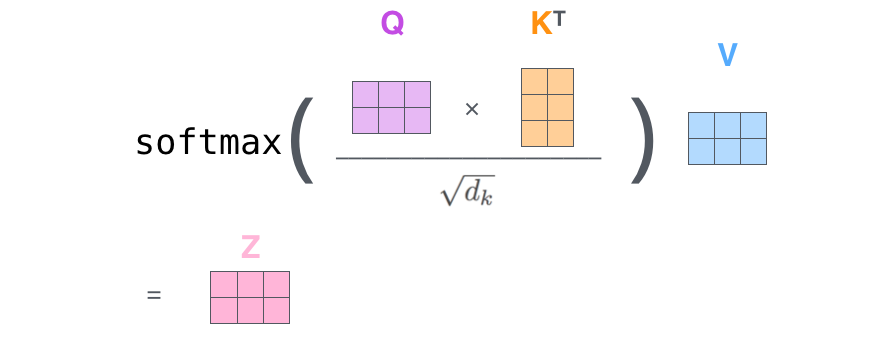
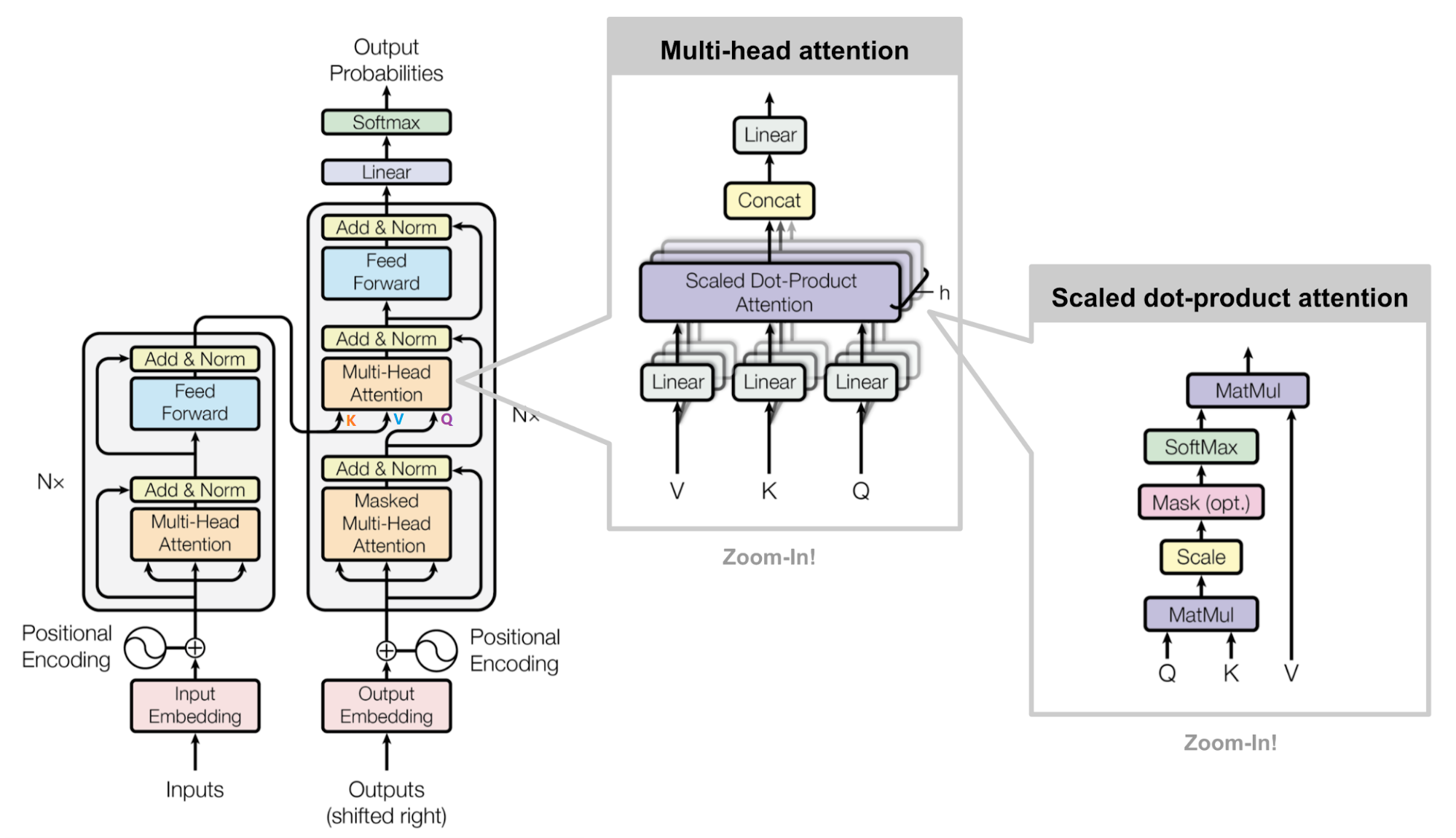
这种通过 query 和 key 的相似性程度来确定 value 的权重分布的方法被称为scaled dot-product attention。
用公式表达如下:
3.2.2 Self-Attention 复杂度
Self-Attention时间复杂度:\(O(n^2 \cdot d)\) ,这里,n是序列的长度,d是embedding的维度。
Self-Attention包括三个步骤:相似度计算,softmax和加权平均,它们分别的时间复杂度是:
-
相似度计算可以看作大小为(n,d)和(d,n)的两个矩阵相乘: \((n,d) *(d,n) =(n^2 \cdot d)\),得到一个(n,n)的矩阵
-
softmax就是直接计算了,时间复杂度为: \(O(n^2)\)
-
加权平均可以看作大小为(n,n)和(n,d)的两个矩阵相乘: \((n,n) *(n,d) =(n^2 \cdot d)\),得到一个(n,d)的矩阵
因此,Self-Attention的时间复杂度是: \(O(n^2 \cdot d)\)
3.2.3 Multi-head Attention
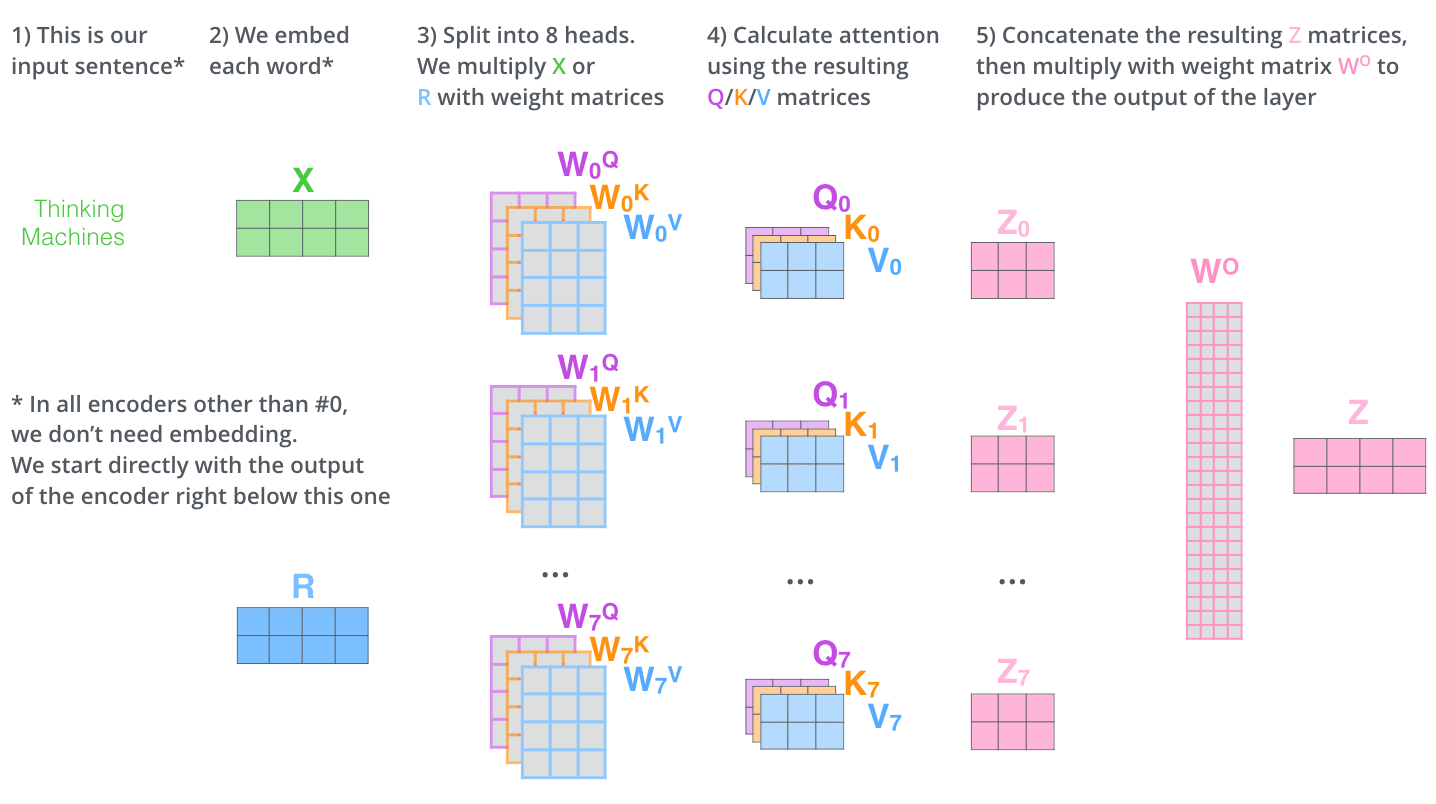
不仅仅只初始化一组Q、K、V的矩阵,而是初始化多组,tranformer是使用了8组,所以最后得到的结果是8个矩阵。
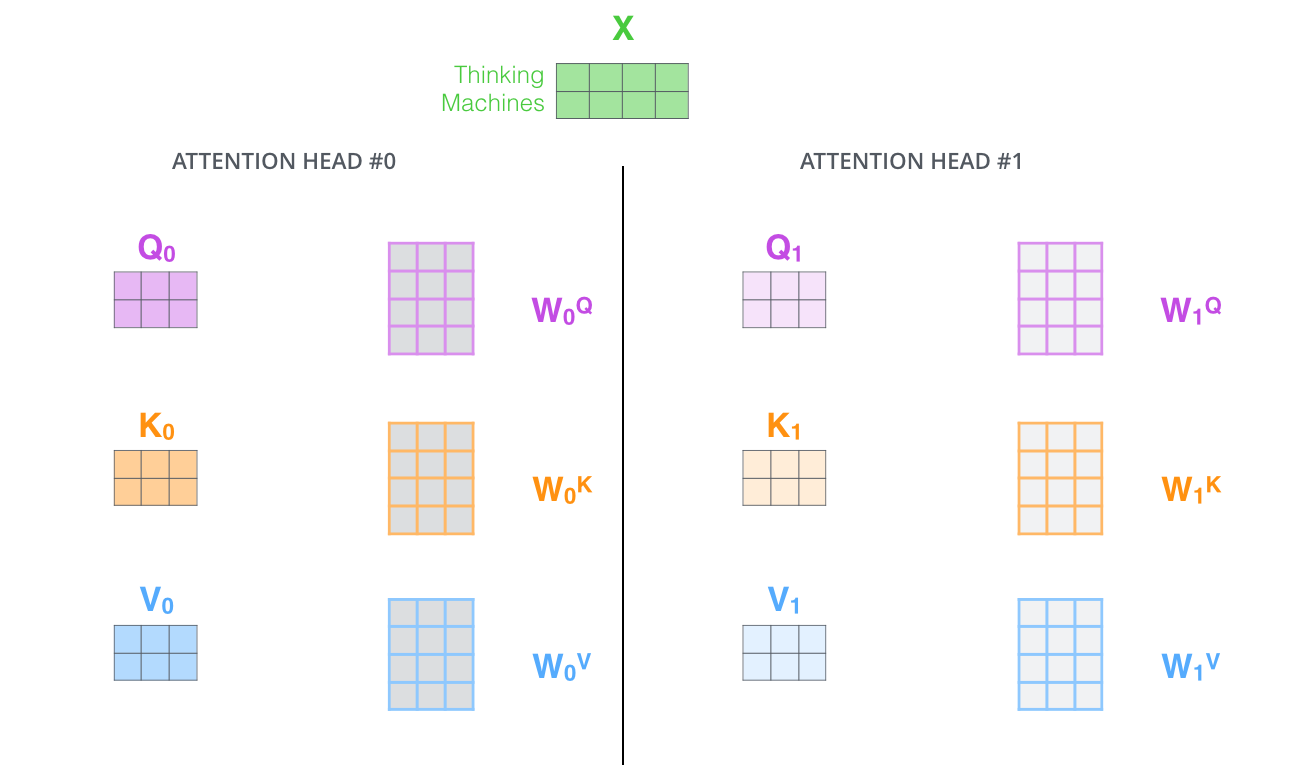
multi-head注意力的全过程如下,首先输入句子,“Thinking Machines”,在embedding模块把句子中的每个单词变成向量X,在encoder层中,除了第0层有embedding操作外,其他的层没有embedding操作;接着把X分成8个head,
3.2.4 Multi-Head Attention复杂度
多头的实现不是循环的计算每个头,而是通过 transposes and reshapes,用矩阵乘法来完成的。
Transformer/BERT中把d ,也就是hidden_size或者embedding_size这个维度做了reshape拆分,我们得到所有的Q,K,V是在d没有拆分前以整体矩形相乘的形式获得的,之后对d所在的维度进行拆分,d = num_attention_heads*d_k,并将num_attention_heads维度transpose到前面,使得Q和K的维度都是(num_attention_heads,seq_len,d_k)这里不考虑batch维度。然后就可以以矢量相乘的形式分别进行8个attention的操作,最后再经过transposes and reshapes就可以得到最终的将各个z在num_attention_heads维度拼接后的最终结果。
这样点积可以看作大小为(num_attention_heads,seq_len,d_k)和(num_attention_heads,d_k,seq_len)的两个张量相乘,得到一个(num_attention_heads,seq_len,seq_len)的矩阵,其实就相当于(seq_len,d_k)和(d_k,seq_len)的两个矩阵相乘,做了num_attention_heads次,时间复杂度是:
因此Multi-Head Attention时间复杂度也是\(O(seq\_len^2 \cdot d)\),复杂度相较单头并没有变化,主要还是transposes and reshapes 的操作,相当于把一个大矩阵相乘变成了多个小矩阵的相乘。
3.2.5 残差连接
经过 self-attention 加权之后输出,也就是Attention(Q,K,V) ,然后把他们加起来做残差连接
除了self-attention这里做残差连接外,feed forward那个地方也需要残差连接,公式类似:
3.2.6 Layer Normalization
Layer Normalization 的作用是把神经网络中隐藏层归一为标准正态分布,也就是独立同分布,以起到加快训练速度,加速收敛的作用
其中:\(X_{hidden} \in R^{batch\_size*seq\_len*embed\_dim}\)
一言以蔽之,
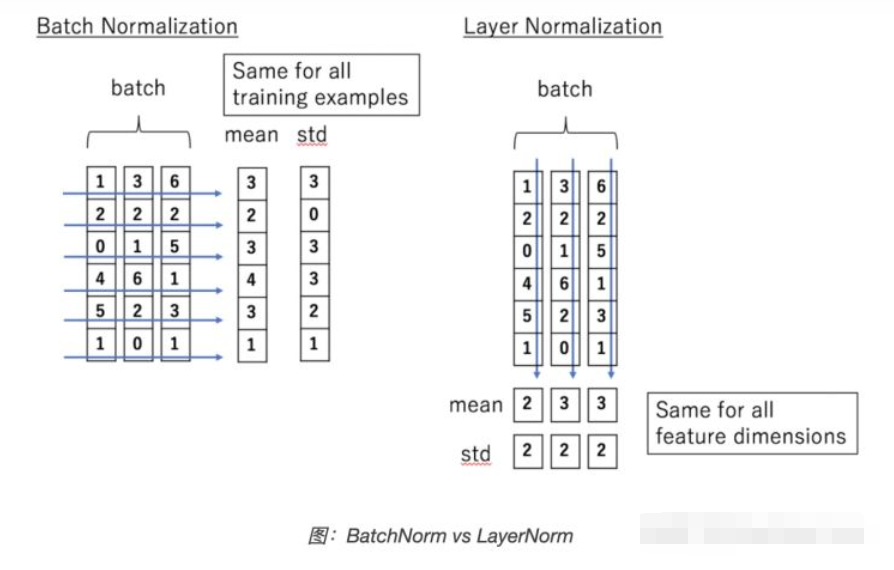
- BN是对batch的维度去做归一化,也就是针对不同样本的同一特征做操作。
- LN是对hidden的维度去做归一化,也就是针对单个样本的不同特征做操作。因此LN可以不受样本数的限制。
具体而言,
- BN就是在每个维度上统计所有样本的值,计算均值和方差;
- LN就是在每个样本上统计所有维度的值,计算均值和方差(注意,这里都是指的简单的MLP情况,输入特征是(bsz,hidden_dim))。
所以,
- BN在每个维度上分布是稳定的,
- LN是每个样本的分布是稳定的。
# 计算均值和方差
x = torch.randn(bsz, hidden_dim)
mu = x.mean(dim=1) # 注意!要统计的是每个样本所有维度的值,所以应该是dim=1上求均值
sigma = x.std(dim=1)
Transformer中Layer Normalization的实现:
对于一个输入tensor:(batch_size, max_len, hidden_dim) 应该如何应用LN层呢?
注意,和Batch Normalization一样,同样会施以线性映射的。区别就是操作的维度不同而已!公式都是统一的:减去均值除以标准差,施以线性映射。同时LN也有BN的那些个好处!
# features: (bsz, max_len, hidden_dim)
class LayerNorm(nn.Module):
def __init__(self, features, eps=1e-6):
super(LayerNorm, self).__init__()
self.a_2 = nn.Parameter(torch.ones(features))
self.b_2 = nn.Parameter(torch.zeros(features))
self.eps = eps
def forward(self, x):
# 就是在统计每个样本所有维度的值,求均值和方差,所以就是在hidden dim上操作
# 相当于变成[bsz*max_len, hidden_dim], 然后再转回来, 保持是三维
mean = x.mean(-1, keepdim=True) # mean: [bsz, max_len, 1]
std = x.std(-1, keepdim=True) # std: [bsz, max_len, 1]
# 注意这里也在最后一个维度发生了广播
return self.a_2 * (x - mean) / (std + self.eps) + self.b_2
总结:
- Layer Normalization和Batch Normalization一样都是一种归一化方法,因此,BatchNorm的好处LN也有,当然也有自己的好处:比如相比于稳定前向输入分布,反向传播时mean和variance计算引入的梯度更有用,可以稳定反向传播的梯度
- 然而BN无法胜任mini-batch size很小的情况,也很难应用于RNN。
BN存在训练和测试的不一致的问题,在小batch size情况下,这种问题很严重,也就是说在evaluate时,使用验证集的mini-batch statisitics和训练集学到的population statistics的差异会大大影响性能。在大batch size的时候,这种差异反而会起到正则化的作用。但是一般都是考虑小batch size的情况,所以还是希望batch的统计量能够尽量接近running statistics。
- LN特别适合处理变长数据,因为是对channel维度做操作(这里指NLP中的hidden维度),和句子长度和batch大小无关。
- BN比LN在inference的时候快,因为不需要计算mean和variance,直接用running mean和running variance就行。
BN和LN在实现上的区别仅仅是:
- BN是对batch的维度去做归一化,也就是针对不同样本的同一特征做操作。
- LN是对hidden的维度去做归一化,也就是针对单个样本的不同特征做操作。
因此,他们都可以归结为:减去均值除以标准差,施以线性映射。
- 对于NLP data来说,Transformer中应用BN并不好用,原因是前向和反向传播中,batch统计量及其梯度都不太稳定。
- 直接把Vision Transformer(ViT)中的LN替换成BN,容易训练不收敛,原因是FFN没有被Normalized,所以还要在FFN block里面的两层之间插一个BN层。(可以加速20% VIT的训练)
我个人还是比较同意有个知友的观点:也就是说,对于NLP data来说,batch上去做归一化是没啥意义的,因为不同句子的同一位置的分布大概率是不同的。
3.2.7 Feed Forward
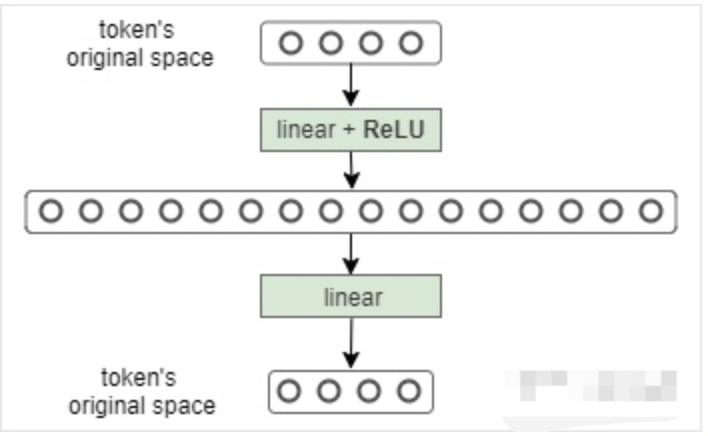
- 将Multi-Head Attention得到的向量再投影到一个更大的空间(论文里将空间放大了4倍),在那个大空间里可以更方便地提取需要的信息(使用Relu激活函数),
- 最后再投影回token向量原来的空间
借鉴SVM来理解:SVM对于比较复杂的问题通过将其特征投影到更高维的空间使得问题简单到一个超平面就能解决。这里token向量里的信息通过Feed Forward Layer被投影到更高维的空间,在高维空间里向量的各类信息彼此之间更容易区别。
3.3 Decoder
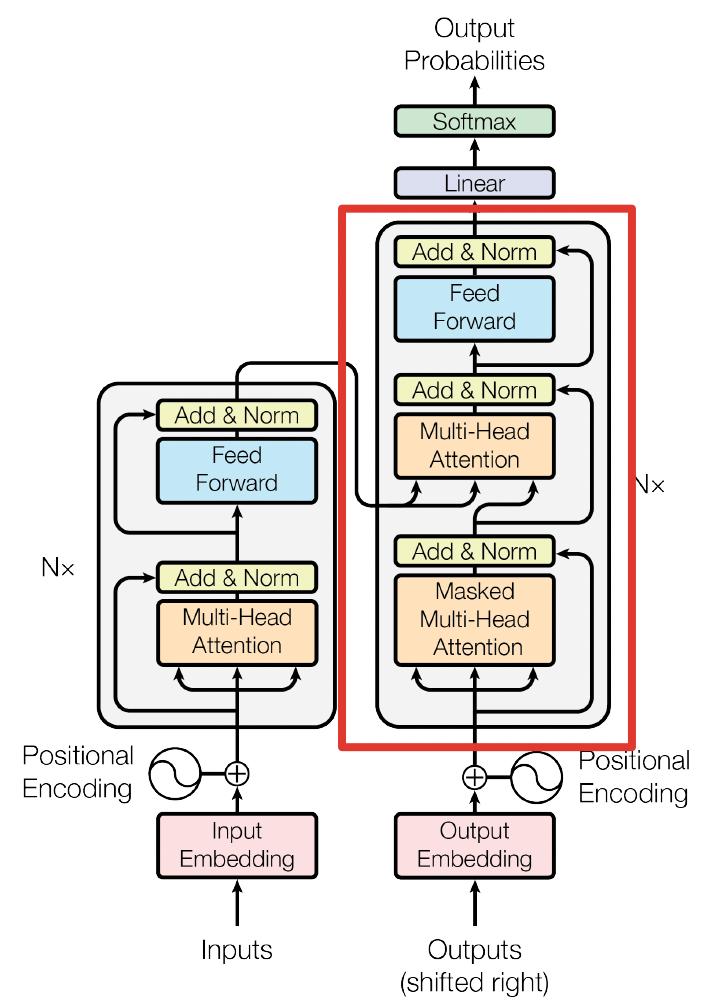
和 Encoder 一样,上面三个部分的每一个部分,都有一个残差连接,后接一个 Layer Normalization。Decoder 的中间部件并不复杂,大部分在前面 Encoder 里我们已经介绍过了,但是Decoder由于其特殊的功能,因此在训练时会涉及到一些细节,下面会介绍Decoder的Masked Self-Attention和Encoder-Decoder Attention两部分,其结构图如下图所示
3.3.1 Masked Self-Attention
- 传统 Seq2Seq 中 Decoder 使用的是 RNN 模型,因此在训练过程中输入t时刻的词,模型无论如何也看不到未来时刻的词,因为循环神经网络是时间驱动的,只有当t时刻运算结束了,才能看到t+1时刻的词。
- 而Transformer Decoder抛弃了RNN,改为Self-Attention,由此就产生了一个问题,在训练过程中,整个ground truth都暴露在Decoder中,这显然是不对的,我们需要对Decoder的输入进行一些处理,该处理被称为Mask。
Mask 非常简单,
- 首先生成一个下三角全 0,上三角全为负无穷的矩阵,
- 然后将其与Scaled Scores相加即可,
- 之后再做softmax,就能将 -inf 变为 0,得到的这个矩阵即为每个字之间的权重。
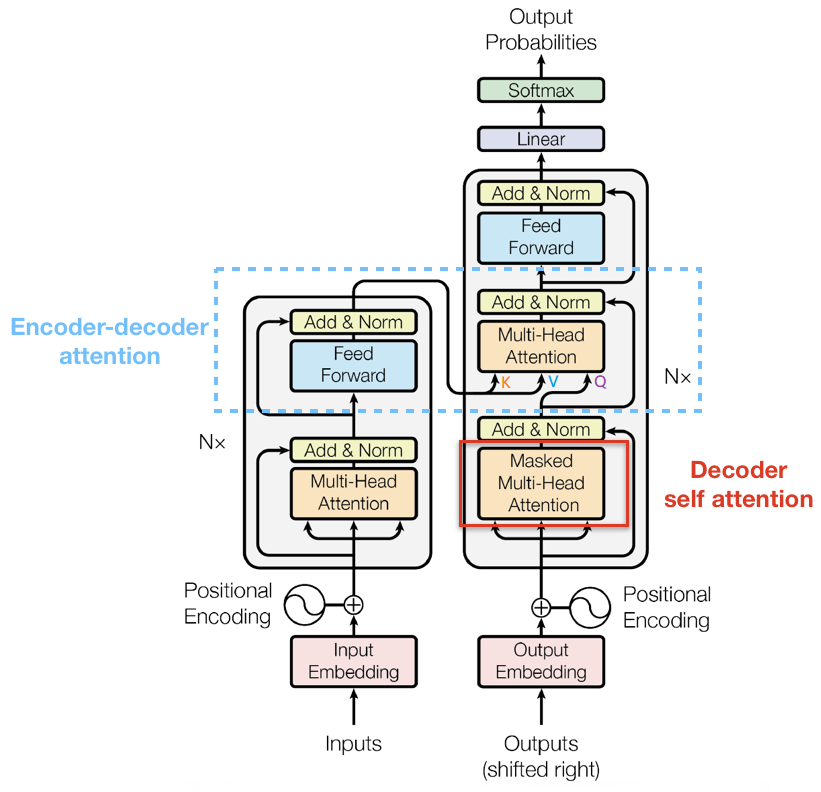
3.3.2 Masked Encoder-Decoder Attention
其实这一部分的计算流程和前面 Masked Self-Attention 很相似,结构也一摸一样,唯一不同的是这里的K,V为 Encoder 的输出,Q为 Decoder 中 Masked Self-Attention 的输出
3.3.3 Decoder的解码
下图展示了Decoder的解码过程,Decoder中的字符预测完之后,会当成输入预测下一个字符,知道遇见终止符号为止。
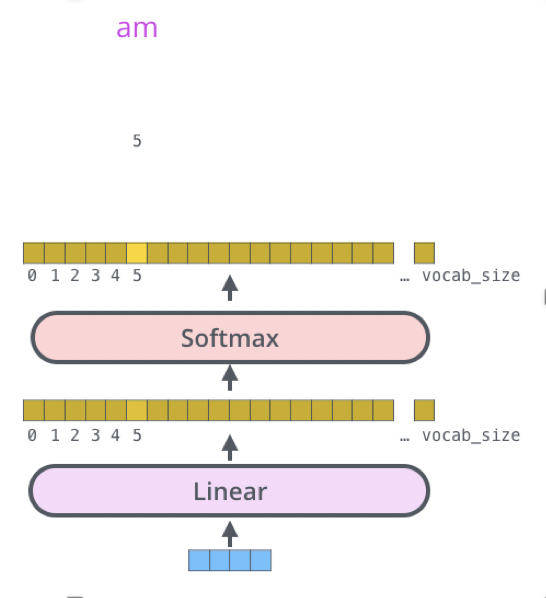
3.4 Transformer的最后一层和Softmax
线性层是一个简单的全连接的神经网络,它将解码器堆栈生成的向量投影到一个更大的向量,称为logits向量。如图linear的输出
softmax层将这些分数转换为概率(全部为正值,总和为1.0)。选择概率最高的单元,并生成与其关联的单词作为此时间步的输出。如图softmax的输出。
3.5 Transformer的权重共享
Transformer在两个地方进行了权重共享:
(1) Encoder和Decoder间的Embedding层权重共享;
《Attention is all you need》中Transformer被应用在机器翻译任务中,源语言和目标语言是不一样的,但它们可以共用一张大词表,
- 对于两种语言中共同出现的词(比如:数字,标点等等)可以得到更好的表示,
- 而且对于Encoder和Decoder,嵌入时都只有对应语言的embedding会被激活,因此是可以共用一张词表做权重共享的。
- 论文中,Transformer词表用了bpe来处理,所以最小的单元是subword。英语和德语同属日耳曼语族,有很多相同的subword,可以共享类似的语义。而像中英这样相差较大的语系,语义共享作用可能不会很大。
但是,共用词表会使得词表数量增大,增加softmax的计算时间,因此实际使用中是否共享可能要根据情况权衡。
(2) Decoder中Embedding层和FC层权重共享;
- Embedding层可以说是通过onehot去取到对应的embedding向量,
- FC层可以说是相反的,通过向量(定义为 x)去得到它可能是某个词的softmax概率,取概率最大(贪婪情况下)的作为预测值。那哪一个会是概率最大的呢?在FC层的每一行量级相同的前提下,理论上和x相同的那一行对应的点积和softmax概率会是最大的(可类比本文问题1)。
因此,Embedding层和FC层权重共享,Embedding层中和向量 x 最接近的那一行对应的词,会获得更大的预测概率。实际上,Decoder中的Embedding层和FC层有点像互为逆过程。
通过这样的权重共享可以减少参数的数量,加快收敛。
4 总结
本文详细介绍了Transformer的细节,包括Encoder,Decoder部分,输出解码的部分,Transformer的共享机制等等。
