linux线程池分析
一. 线程池学习文件
pool_test/ -> 线程池函数接口实现源码,简单实例。
系统编程项目接口设计说明书.doc -> 详细说明了线程池各个函数的头文件/原型/参数/返回值..。
线程池模型.jpg -> 帮助大家理解线程池原理。
二. 学习线程池实现过程?
1. 什么是线程池?
线程池就是多个线程组合起来的一个集合,当有任务时,线程就会处理任务,当没有任务时,线程休息。
2. 分析线程池源码
thread_pool.c -> 线程池函数接口源码
thread_pool.h -> 函数接口声明/结构体声明/头文件..
===========================================================
thread_pool.h
#define MAX_WAITING_TASKS 1000
-> 最大的任务等待个数
#define MAX_ACTIVE_THREADS 20 -> 最大线程个数
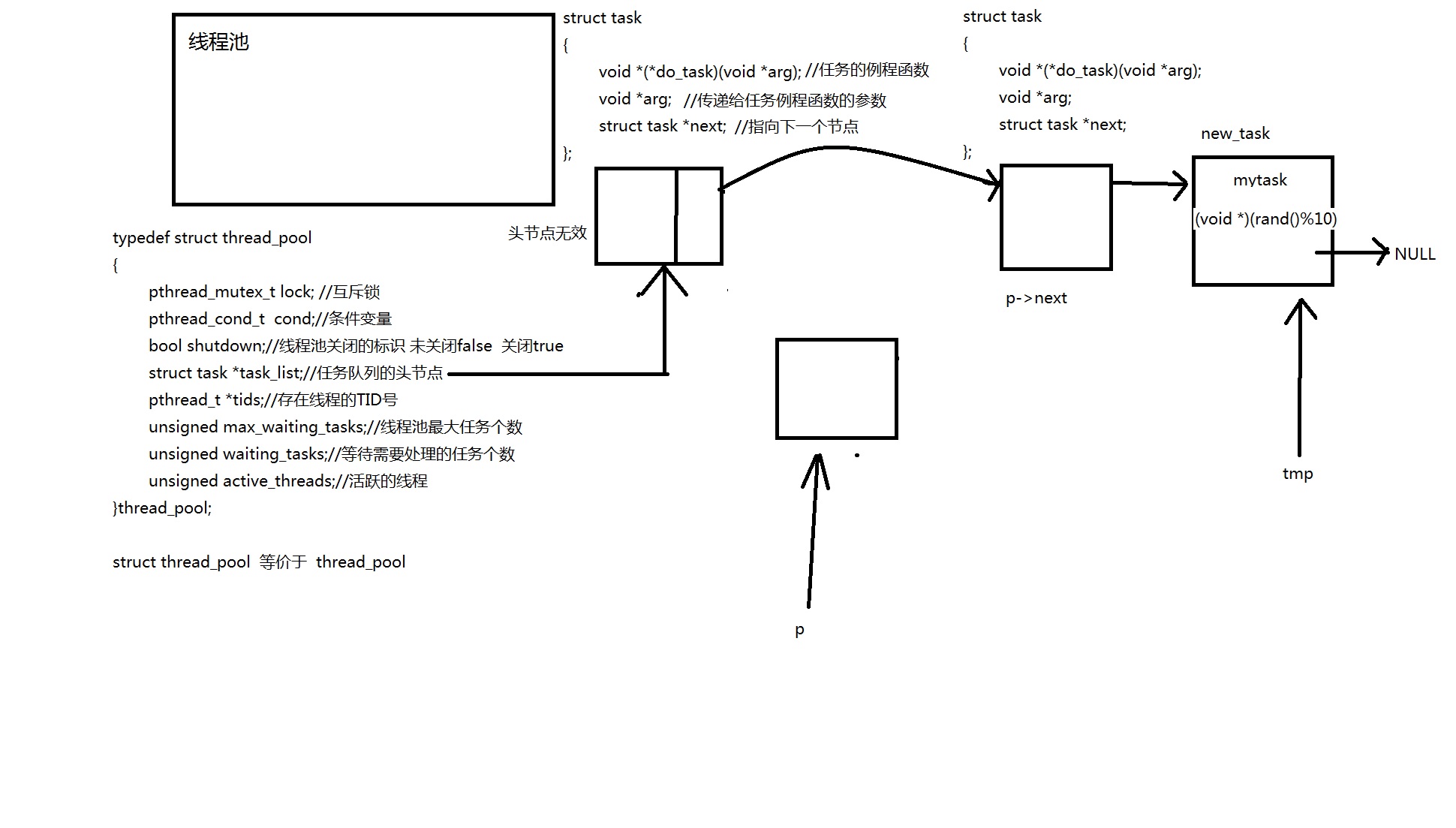
0)任务节点结构体
struct task
{
void *(*do_task)(void *arg); -> 任务函数
void *arg;
-> 任务函数的参数
struct task *next; -> 指向下一个任务节点的指针
};
1)线程池模型
typedef struct thread_pool
{
pthread_mutex_t lock;
-> 互斥锁
pthread_cond_t cond;
-> 条件变量
bool shutdown;
-> 线程池关闭标识符号 true->关闭 false->未关闭
struct task *task_list;
-> 任务队列的头文件
pthread_t *tids;
-> 存放线程TID号空间地址
unsigned max_waiting_tasks;
-> 最大的等待任务的个数
unsigned waiting_tasks; -> 当前等待任务的个数
unsigned active_threads;
-> 当前线程池中线程的个数
}thread_pool;
2)初始化线程池函数模型
bool init_pool(thread_pool *pool, unsigned int threads_number);
3)线程处理函数
void *routine(void *arg)
4)添加任务函数
bool add_task(thread_pool *pool,void *(*do_task)(void *arg), void *arg)
===========================================================
thread_pool.c
1)初始化线程池函数源码
2)线程处理函数源码
3)添加任务函数源码
源码:
头文件:
#ifndef _THREAD_POOL_H_ #define _THREAD_POOL_H_ #include <stdio.h> #include <stdbool.h> #include <unistd.h> #include <stdlib.h> #include <string.h> #include <strings.h> #include <errno.h> #include <pthread.h> #define MAX_WAITING_TASKS 1000 #define MAX_ACTIVE_THREADS 20 struct task { void *(*do_task)(void *arg); void *arg; struct task *next; }; typedef struct thread_pool { pthread_mutex_t lock; pthread_cond_t cond; bool shutdown; struct task *task_list; pthread_t *tids; unsigned max_waiting_tasks; unsigned waiting_tasks; unsigned active_threads; }thread_pool; bool init_pool(thread_pool *pool, unsigned int threads_number); bool add_task(thread_pool *pool, void *(*do_task)(void *arg), void *task); int add_thread(thread_pool *pool, unsigned int additional_threads_number); int remove_thread(thread_pool *pool, unsigned int removing_threads_number); bool destroy_pool(thread_pool *pool); void *routine(void *arg); #endif
功能函数:
#include "thread_pool.h" void handler(void *arg) { printf("[%u] is ended.\n", (unsigned)pthread_self()); //解锁! pthread_mutex_unlock((pthread_mutex_t *)arg); } void *routine(void *arg) { //接住线程池的地址 thread_pool *pool = (thread_pool *)arg; struct task *p; while(1) { //取消例程函数,将来线程上锁了,如果收到取消请求,那么先解锁,再退出 pthread_cleanup_push(handler, (void *)&pool->lock); //任务队列是属于临界资源。 //访问任务队列之前都必须上锁。 pthread_mutex_lock(&pool->lock); //如果当前线程池未被关闭并且线程池中没有需要处理的任务时: while(pool->waiting_tasks == 0 && !pool->shutdown) { //那么就进入条件变量中等待! pthread_cond_wait(&pool->cond, &pool->lock); } //如果线程等待任务为0,并且线程池已经关闭了。 if(pool->waiting_tasks == 0 && pool->shutdown == true) { //解锁 pthread_mutex_unlock(&pool->lock); //走人 pthread_exit(NULL); } //有任务做,代表肯定不是空链表,拿任务p p = pool->task_list->next; pool->task_list->next = p->next; //当前等待的任务的个数-1 pool->waiting_tasks--; //解锁 pthread_mutex_unlock(&pool->lock); //删除线程取消例程函数 pthread_cleanup_pop(0); //设置线程不可以响应取消。 pthread_setcancelstate(PTHREAD_CANCEL_DISABLE, NULL); //执行任务节点中函数过程中,不希望被别人取消掉。 (p->do_task)(p->arg); //设置为可以响应取消 pthread_setcancelstate(PTHREAD_CANCEL_ENABLE, NULL); //释放任务节点p的内存空间 free(p); } pthread_exit(NULL); } bool init_pool(thread_pool *pool, unsigned int threads_number) { //1. 初始化互斥锁 pthread_mutex_init(&pool->lock, NULL); //2. 初始化条件变量 pthread_cond_init(&pool->cond, NULL); //3. 线程池关闭标志为未关闭 pool->shutdown = false; //4. 为任务队列头节点申请空间 pool->task_list = malloc(sizeof(struct task)); //5. 为线程TID号申请空间 pool->tids = malloc(sizeof(pthread_t) * MAX_ACTIVE_THREADS); //错误判断 if(pool->task_list == NULL || pool->tids == NULL) { perror("allocate memory error"); return false; } //为任务队列头节点的指针域赋值NULL pool->task_list->next = NULL; //设置最大等待任务个数为1000 pool->max_waiting_tasks = MAX_WAITING_TASKS; //设置当前等待任务的个数为0 pool->waiting_tasks = 0; //设置当前线程池线程的个数 pool->active_threads = threads_number; int i; //创建线程池中的子线程 for(i=0; i<pool->active_threads; i++) { if(pthread_create(&((pool->tids)[i]), NULL,routine, (void *)pool) != 0) { perror("create threads error"); return false; } } //初始化成功 return true; } bool add_task(thread_pool *pool,void *(*do_task)(void *arg), void *arg) { //为新节点申请内存空间 struct task *new_task = malloc(sizeof(struct task)); if(new_task == NULL) { perror("allocate memory error"); return false; } //为新节点的数据域赋值 new_task->do_task = do_task; //函数 new_task->arg = arg; //函数的参数 //为新节点的指针域赋值 new_task->next = NULL; //访问任务队列前,先上锁! pthread_mutex_lock(&pool->lock); //如果当前等待任务个数>=1000,则添加任务失败! if(pool->waiting_tasks >= MAX_WAITING_TASKS) { //解锁 pthread_mutex_unlock(&pool->lock); //输出错误信息 fprintf(stderr, "too many tasks.\n"); //释放刚刚初始化过的新节点 free(new_task); return false; } //寻找任务队列的最后一个节点 struct task *tmp = pool->task_list; while(tmp->next != NULL) tmp = tmp->next; //tmp->next = NULL; //把新节点尾插进去任务队列中 tmp->next = new_task; //当前最大的等待任务的个数+1 pool->waiting_tasks++; //解锁 pthread_mutex_unlock(&pool->lock); //随机唤醒条件变量中其中一个线程起来就可以了。 pthread_cond_signal(&pool->cond); return true; } int add_thread(thread_pool *pool, unsigned additional_threads) { //如果新增0个线程 if(additional_threads == 0) return 0; //直接返回0 //添加后线程总数 unsigned total_threads = pool->active_threads + additional_threads; int i, actual_increment = 0; //创建线程 for(i = pool->active_threads; i < total_threads && i < MAX_ACTIVE_THREADS; i++) { if(pthread_create(&((pool->tids)[i]),NULL, routine, (void *)pool) != 0) { perror("add threads error"); if(actual_increment == 0) return -1; break; } actual_increment++; //真正创建的线程个数 } //当前活跃的线程数 = 原来活跃的线程数 + 新实际创建的线程数 pool->active_threads += actual_increment; return actual_increment; } int remove_thread(thread_pool *pool, unsigned int removing_threads) { //如果需要删除0条线程 if(removing_threads == 0) return pool->active_threads; //当前线程池活跃的线程个数 //剩余的线程数 = 当前活跃的线程数 - 需要删除的线程。 int remaining_threads = pool->active_threads - removing_threads; //线程池中至少有1条线程 remaining_threads = remaining_threads > 0 ? remaining_threads : 1; int i; for(i=pool->active_threads-1; i>remaining_threads-1; i--) { errno = pthread_cancel(pool->tids[i]); if(errno != 0) break; } //如果取消失败,则函数返回-1 if(i == pool->active_threads-1) return -1; else { //计算当前剩余实际的个数 pool->active_threads = i+1; return i+1; //返回当前线程剩余的个数 } } bool destroy_pool(thread_pool *pool) { pool->shutdown = true; //当前线程池标志是关闭状态 pthread_cond_broadcast(&pool->cond); int i; for(i=0; i<pool->active_threads; i++) { errno = pthread_join(pool->tids[i], NULL); if(errno != 0) { printf("join tids[%d] error: %s\n", i, strerror(errno)); } else printf("[%u] is joined\n", (unsigned)pool->tids[i]); } free(pool->task_list); free(pool->tids); free(pool); return true; }
主函数:
#include "thread_pool.h" void *mytask(void *arg) //线程的任务 { int n = (int)arg; //工作任务:余数是多少,就睡多少秒,睡完,任务就算完成 printf("[%u][%s] ==> job will be done in %d sec...\n", (unsigned)pthread_self(), __FUNCTION__, n); sleep(n); printf("[%u][%s] ==> job done!\n", (unsigned)pthread_self(), __FUNCTION__); return NULL; } void *count_time(void *arg) { int i = 0; while(1) { sleep(1); printf("sec: %d\n", ++i); } } int main(void) { // 本线程用来显示当前流逝的秒数 // 跟程序逻辑无关 pthread_t a; pthread_create(&a, NULL, count_time, NULL); // 1, initialize the pool thread_pool *pool = malloc(sizeof(thread_pool)); init_pool(pool, 2); //2个线程都在条件变量中睡眠 // 2, throw tasks printf("throwing 3 tasks...\n"); add_task(pool, mytask, (void *)(rand()%10)); add_task(pool, mytask, (void *)(rand()%10)); add_task(pool, mytask, (void *)(rand()%10)); // 3, check active threads number printf("current thread number: %d\n", remove_thread(pool, 0));//2 sleep(9); // 4, throw tasks printf("throwing another 6 tasks...\n"); add_task(pool, mytask, (void *)(rand()%10)); add_task(pool, mytask, (void *)(rand()%10)); add_task(pool, mytask, (void *)(rand()%10)); add_task(pool, mytask, (void *)(rand()%10)); add_task(pool, mytask, (void *)(rand()%10)); add_task(pool, mytask, (void *)(rand()%10)); // 5, add threads add_thread(pool, 2); sleep(5); // 6, remove threads printf("remove 3 threads from the pool, " "current thread number: %d\n", remove_thread(pool, 3)); // 7, destroy the pool destroy_pool(pool); return 0; }

