


关于感受野 (Receptive field) 你该知道的事
Receptive field 可中译为“感受野”,是卷积神经网络中非常重要的概念之一。
我个人最早看到这个词的描述是在 2012 年 Krizhevsky 的 paper 中就有提到过,当时是各种不明白的,事实上各种网络教学课程也都并没有仔细的讲清楚“感受野”是怎么一回事,有什么用等等。直到我某天看了 UiO 的博士生 Dang Ha The Hien写了一篇非常流传甚广的博文:A guide to receptive field arithmetic for Convolutional Neural Networks,才大彻大悟,世界变得好了,人生都变得有意义了,正如博主自己谈到的写作动机:
This post fills in the gap by introducing a new way to visualize feature maps in a CNN that exposes the receptive field information, accompanied by a complete receptive field calculation that can be used for any CNN architecture.
此文算是上述博文的一个精要版笔记,再加上个人的理解与计算过程。
FYI:读者已经熟悉 CNN 的基本概念,特别是卷积和池化操作。一个非常好的细致概述相关计算细节的 paper 是:A guide to convolution arithmetic for deep learning。
感受野可视化
我们知晓某一层的卷积核大小对应于在上一层输出的“图像”上的“视野”大小。比如,某层有 3x3 的卷积核,那就是一个 3x3 大小的滑动窗口在该层的输入“图像”上去扫描,我们就可以谈相对于上一层,说该层下特征图(feature map)当中任一特征点(feature)的“感受野”大小只有 3x3.(打引号说明术语引用不够严谨)。
- 先看个感受野的较严格定义:
The receptive field is defined as the region in the input space that a particular CNN’s feature is looking at (i.e. be affected by).
一个特征点的感受野可以用其所在的中心点位置(center location)和大小(size)来描述。然而,某卷积特征点所对应的感受野上并不是所有像素都是同等重要的,就好比人的眼睛所在的有限视野范围内,总有要 focus 的焦点。对于感受野来说,距离中心点越近的像素肯定对未来输出特征图的贡献就越大。换句话说,一个特征点在输入图像(Input) 上所关注的特定区域(也就是其对应的感受野)会在该区域的中心处聚焦,并以指数变化向周边扩展(need more explanation)。
废话不多说,我们直接先算起来。
首先假定我们所考虑的 CNN 架构是对称的,并且输入图像也是方形的。这样的话,我们就忽略掉不同长宽所造成的维度不同。
Way1 对应为通常的一种理解感受野的方式。在下方左侧的上图中,是在 5x5 的图像(蓝色)上做一个 3x3 卷积核的卷积计算操作,步长为2,padding 为1,所以输出为 3x3 的特征图(绿色)。那么该特征图上的每个特征(1x1)对应的感受野,就是 3x3。在下方左侧的下图中,是在上述基础上再加了一个完全一样的卷积层。对于经过第二层卷积后其上的一个特征(如红色圈)在上一层特征图上“感受”到 3x3 大小,该 3x3 大小的每个特征再映射回到图像上,就会发现由 7x7 个像素点与之关联,有所贡献。于是,就可以说第二层卷积后的特征其感受野大小是 7x7(需要自己画个图,好好数一数)。Way2 (下方右侧的图像)是另一种理解的方式,主要的区别仅仅是将两层特征图上的特征不进行“合成”,而是保留其在前一层因“步长”而产生的影响。
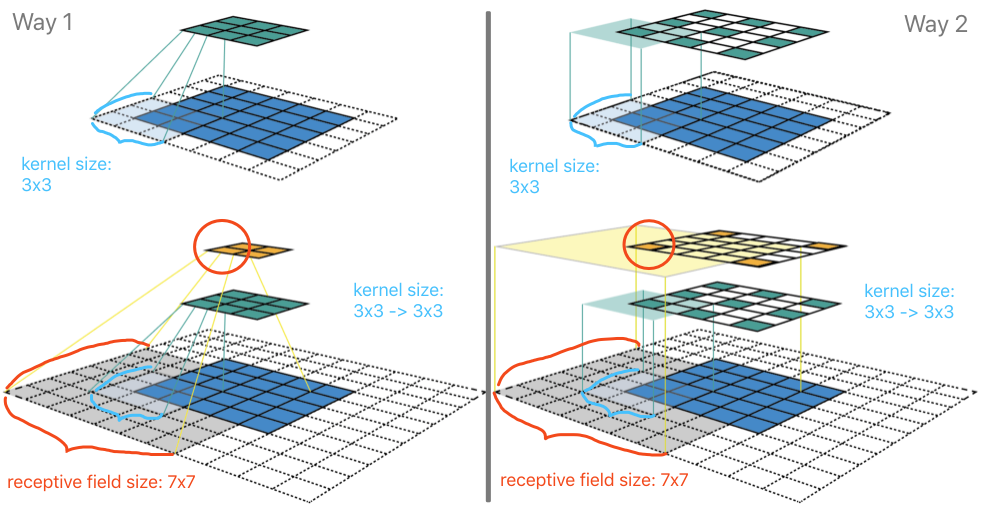
Way2 的理解方式其实更具有一般性,我们可以无需考虑输入图像的大小对感受野进行计算。如下图:

虽然,图上绘制了输入 9x9 的图像(蓝色),但是它的大小情况是无关紧要的,因为我们现在只关注某“无限”大小图像某一像素点为中心的一块区域进行卷积操作。首先,经过一个 3x3 的卷积层(padding=1,stride=2)后,可以得到特征输出(深绿色)部分。其中深绿色的特征分别表示卷积核扫过输入图像时,卷积核中心点所在的相对位置。此时,每个深绿色特征的感受野是 3x3 (浅绿)。这很好理解,每一个绿色特征值的贡献来源是其周围一个 3x3 面积。再叠加一个 3x3 的卷积层(padding=1,stride=2)后,输出得到 3x3 的特征输出(橙色)。此时的中心点的感受野所对应的是黄色区域 7x7,代表的是输入图像在中心点橙色特征所做的贡献。
这就是为何在 《VERY DEEP CONVOLUTIONAL NETWORKS FOR LARGE-SCALE IMAGE RECOGNITION》 文章中提到:
It is easy to see that a stack of two 3 × 3 conv. layers (without spatial pooling in between) has an effective receptive field of 5 × 5; three such layers have a 7 × 7 effective receptive field.
也就是说两层 3x3 的卷积层直接堆叠后(无池化)可以算的有感受野是 5x5,三层堆叠后的感受野就是 7x7。
感受野计算
直观的感受了感受野之后,究竟该如何定量计算嗯?只要依据 Way2 图像的理解,我们对每一层的特征“顺藤摸瓜”即可。
我们已经发觉到,某一层特征上的感受野大小依赖的要素有:每一层的卷积核大小 k,padding 大小 p,stride s。在推导某层的感受野时,还需要考虑到该层之前各层上特征的的感受野大小 r,以及各层相邻特征之间的距离 j(jump)。
所以对于某一卷积层(卷积核大小 k,padding 大小 p,stride s)上某特征的感受野大小公式为:
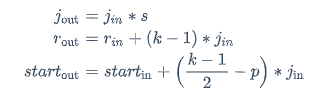
- 第一行计算的是,相邻特征之间的距离(jump)。各层里的特征之间的距离显然是严重依赖于 stride 的,并且逐层累积。值得注意的是,输入图像的作为起始像素特征,它的特征距离(jump) 为1。
- 第二行计算的就是某层的特征的感受大小。它依赖于上一层的特征的感受野大小 和特征之间的距离 ,以及该层的卷积核大小 k。输入图像的每个像素作为特征的感受野就是其自身,为1。
- 第三行公式计算的是特征感受野的几何半径。对于处于特征图边缘处的特征来说,这类特征的感受野并不会完整的对应到原输入图像上的区域,都会小一些。初始特征的感受野几何半径为 0.5。
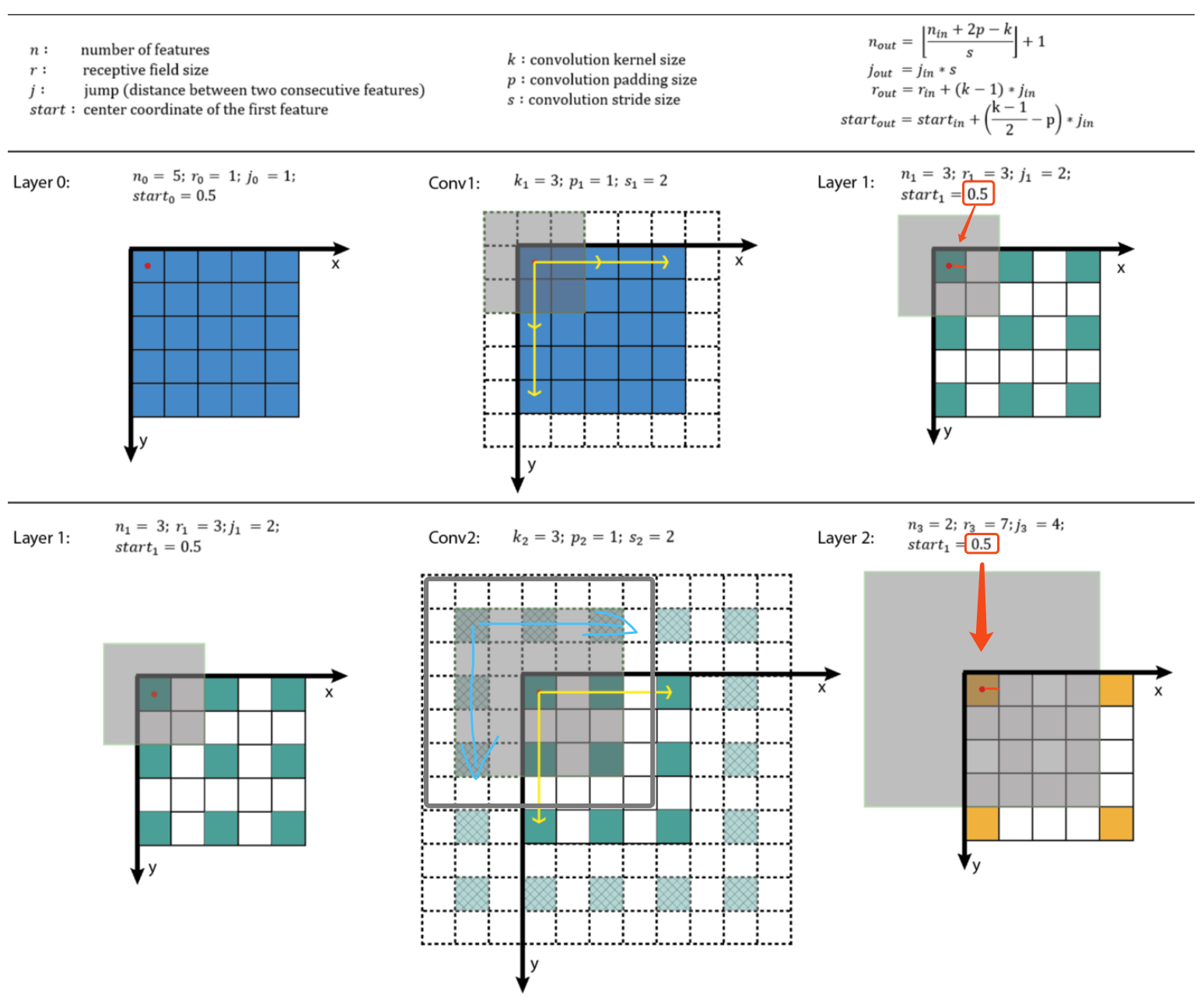
上图中除了公式和说明部分外,有两行分别代表的是第一层卷积和第二层卷积。在每行中,应从左往右观察卷积核计算和操作。
第一层比较简单,最后输出 3x3 绿色的特征图,每个特征有阴影框大小来表示每个特征对应的感受野大小 3x3。其中  表示的 0.5 几何半径,我已经用红色标识出来,对应于阴影面积覆盖到的绿色面积的几何半径。
表示的 0.5 几何半径,我已经用红色标识出来,对应于阴影面积覆盖到的绿色面积的几何半径。
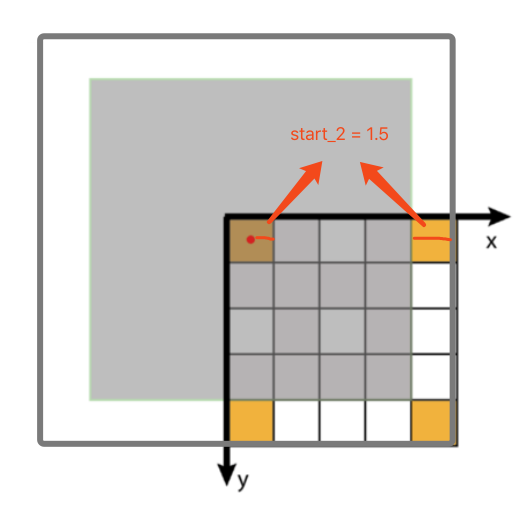
第二层,由于有一个单位的 padding,所以 3x3 卷积核是按照蓝色箭头标记作为的起始方向开始,在所有的绿色位置上挪动的。最后算得特征的感受野大小为 7x7,亦对应于阴影框和阴影区域部分。其中  是 0.5 也已经用红色标记了出来。
是 0.5 也已经用红色标记了出来。
Python Script
这个代码其实很好写,我就直接挪用 Dang Ha The Hien 的 python 脚本了:
# [filter size, stride, padding] #Assume the two dimensions are the same #Each kernel requires the following parameters: # - k_i: kernel size # - s_i: stride # - p_i: padding (if padding is uneven, right padding will higher than left padding; "SAME" option in tensorflow) # #Each layer i requires the following parameters to be fully represented: # - n_i: number of feature (data layer has n_1 = imagesize ) # - j_i: distance (projected to image pixel distance) between center of two adjacent features # - r_i: receptive field of a feature in layer i # - start_i: position of the first feature's receptive field in layer i (idx start from 0, negative means the center fall into padding) import math convnet = [[11,4,0],[3,2,0],[5,1,2],[3,2,0],[3,1,1],[3,1,1],[3,1,1],[3,2,0],[6,1,0], [1, 1, 0]] layer_names = ['conv1','pool1','conv2','pool2','conv3','conv4','conv5','pool5','fc6-conv', 'fc7-conv'] imsize = 227 def outFromIn(conv, layerIn): n_in = layerIn[0] j_in = layerIn[1] r_in = layerIn[2] start_in = layerIn[3] k = conv[0] s = conv[1] p = conv[2] n_out = math.floor((n_in - k + 2*p)/s) + 1 actualP = (n_out-1)*s - n_in + k pR = math.ceil(actualP/2) pL = math.floor(actualP/2) j_out = j_in * s r_out = r_in + (k - 1)*j_in start_out = start_in + ((k-1)/2 - pL)*j_in return n_out, j_out, r_out, start_out def printLayer(layer, layer_name): print(layer_name + ":") print("\t n features: %s \n \t jump: %s \n \t receptive size: %s \t start: %s " % (layer[0], layer[1], layer[2], layer[3])) layerInfos = [] if __name__ == '__main__': #first layer is the data layer (image) with n_0 = image size; j_0 = 1; r_0 = 1; and start_0 = 0.5 print ("-------Net summary------") currentLayer = [imsize, 1, 1, 0.5] printLayer(currentLayer, "input image") for i in range(len(convnet)): currentLayer = outFromIn(convnet[i], currentLayer) layerInfos.append(currentLayer) printLayer(currentLayer, layer_names[i]) print ("------------------------") layer_name = raw_input ("Layer name where the feature in: ") layer_idx = layer_names.index(layer_name) idx_x = int(raw_input ("index of the feature in x dimension (from 0)")) idx_y = int(raw_input ("index of the feature in y dimension (from 0)")) n = layerInfos[layer_idx][0] j = layerInfos[layer_idx][1] r = layerInfos[layer_idx][2] start = layerInfos[layer_idx][3] assert(idx_x < n) assert(idx_y < n) print ("receptive field: (%s, %s)" % (r, r)) print ("center: (%s, %s)" % (start+idx_x*j, start+idx_y*j))
在 AlexNet 网络上的效果如下:



