【笔记】凸优化 Convex Optimization
 convexity, constrained optim problem, dual problem, gradient descent
convexity, constrained optim problem, dual problem, gradient descent
Differentiation
Def. Gradient
\(f:{\cal X}\sube\mathbb{R} ^N\to \mathbb{R}\) is differentiable. Then the gradient of \(f\) at \({\bf x}\in\cal{X}\), denoted by \(\nabla f({\bf x})\), is defined by
Def. Hessian
\(f:{\cal X}\sube\mathbb{R} ^N\to \mathbb{R}\) is twice differentiable. Then the Hessian of \(f\) at \({\bf x}\in\cal{X}\), denoted by \(\nabla ^2 f({\bf x})\), is defined by
Th. Fermat's theorem
\(f:{\cal X}\sube\mathbb{R} ^N\to \mathbb{R}\) is twice differentiable. If \(f\) admits a local extrememum at \({\bf x} ^ *\), then \(\nabla f(\bf x ^ *)=0\)
Convexity
Def. Convex set
A set \({\cal X}\sube \mathbb{R} ^N\) is said to be convex, if for any \({\bf x, y}\in \cal X\), the segment \(\bf [x, y]\) lies in \(\cal X\), that is \(\{\alpha{\bf x} + (1-\alpha){\bf y}:0\le\alpha\le 1 \}\sube\cal X\)
Th. Operations that preserve convexity
- \({\cal C} _i\) is convex for all \(i\in I\), then \(\bigcap _{i\in I} {\cal C} _i\) is also convex
- \({\cal C} _1, {\cal C} _2\) is convex, then \({\cal C _1+C _2}=\{x _1+x _2:x _1\in {\cal C} _1, x _2\in {\cal X} _2 \}\) is also convex
- \({\cal C} _1, {\cal C} _2\) is convex, then \({\cal C _1\times C _2}=\{(x _1, x _2):x _1\in {\cal C} _1, x _2\in {\cal X} _2 \}\) is also convex
- Any projection of a convex set is also convex
Def. Convex hull
The Convex hull \(\text{conv}(\cal X)\) of set \({\cal X}\sube \mathbb{R} ^N\), is the minimal convex set containing \(\cal X\), that is
Def. Epigraph
The epigraph of \(f:{\cal X}\to \mathbb{R}\), denoted by \(\text{Epi } f\), is defined by \(\{(x,y):x\in {\cal X}, y\ge f(x)\}\)
Def. Convex function
Convex set \(\cal X\). A function \(f:{\cal X}\to \mathbb{R}\) is said to be convex, iff \(\text{Epi }f\) is convex, or equivalently, for all \({\bf x, y}\in {\cal X},\alpha \in [0,1]\)
Moreover, \(f\) is said to be strictly convex if the inequality is strict when \(\bf x\ne y\) and \(\alpha\in (0,1)\). \(f\) is said to be (strictly) concave if \(-f\) is (strictly) convex.
Th. Convex function characterized by first-order differential
\(f:{\cal X}\sube\mathbb{R} ^N\to \mathbb{R}\) is differentiable. Then \(f\) is convex iff \(\text{dom}(f)\) is convex, and
交换 \(\bf x, y\),得到 \(f({\bf x})-f({\bf y})\ge \nabla f({\bf y})\cdot({\bf x-y})\),相加得:
其含义为 “梯度单调且内积大等于零”,这也是凸性的等价条件之一
Th. Convex function characterized by second-order differential
\(f:{\cal X}\sube\mathbb{R} ^N\to \mathbb{R}\) is twice differentiable. Then \(f\) is convex iff \(\text{dom}(f)\) is convex, and its Hessian is positive semidefinite (半正定)
- 对称阵为半正定,若其所有特征值非负;\(A\succeq B\) 等价于 \(A-B\) 为半正定
- If \(f\) is scalar (eg. \(x\mapsto x ^2\)), then \(f\) is convex iff \(\forall x\in \text{dom}(f), f''(x)\ge 0\)
- For example
- Linear functions is both convex and concave
- Any norm \(\Vert\cdot\Vert\) over convex set \(\cal X\) is a convex function
\(\Vert\alpha{\bf x}+(1-\alpha){\bf y} \Vert\le \Vert\alpha{\bf x}\Vert+\Vert(1-\alpha){\bf y} \Vert\le \alpha\Vert{\bf x}\Vert+(1-\alpha)\Vert{\bf y}\Vert\)
- Using composition rules to prove convexity
Th. Composition of convex/concave functions
Assume \(h:\mathbb{R}\to\mathbb{R}\) and \(g:\mathbb{R} ^N\to\mathbb{R}\) are twice differentiable. Define \(f({\bf x})=h(g({\bf x})), \forall {\bf x}\in \mathbb{R} ^N\), then
- \(h\) is convex & non-decreasing, \(g\) is convex \(\implies\) \(f\) is convex
- \(h\) is convex & non-increasing, \(g\) is concave \(\implies\) \(f\) is convex
- \(h\) is concave & non-decreasing, \(g\) is concave \(\implies\) \(f\) is concave
- \(h\) is concave & non-increasing, \(g\) is convex \(\implies\) \(f\) is concave
Proof: It holds for \(N=1\), which suffices to prove convexity (concavity) along all lines that intersect the domain.
Example: \(g\) could be any norm \(\Vert\cdot\Vert\)
Th. Pointwise maximum of convex functions
\(f _i\) is a convex function defined over convex set \(\cal C\) for all \(i\in I\), then \(f(x)=\sup _{i\in I}f _i(x), x\in \cal C\) is a convex function.
Proof: \(\text{Epi } f = \bigcap _{i\in I} \text{Epi } f _i\) is convex
- \(f({\bf x})=\max _{i\in I}{\bf w} _i\cdot {\bf x}+b _i\) over a convex set, is a convex function
- The maximum eigenvalue \(\lambda _{\max}({\bf M})\) over the set of symmetric matrices, is a convex function, since \(\lambda _{\max}({\bf M})=\sup _{\Vert\bf x\Vert _2\le 1}{\bf x}'{\bf Mx}\) is supremum of linear functions \({\bf M}\mapsto{\bf x}'{\bf Mx}\)
More generally, let \(\lambda _{k}(\bf M)\) denote the top \(k\) eigenvalues, then \({\bf M}\mapsto \sum _{i=1} ^{k}\lambda _{i}(\bf M)\) and \({\bf M}\mapsto \sum _{i=n-k+1} ^{n}\lambda _{i}({\bf M})=-\sum _{i=1} ^{k}\lambda _i(-\bf M)\) are both convex function
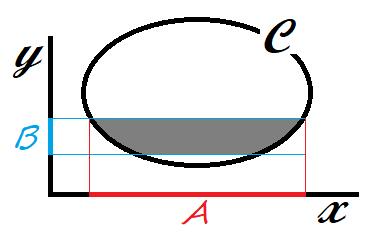
Th. Partial infimum
Convex function \(f\) defined over convex set \(\cal C\sube X\times Y\), and conves set \(\cal B\sube Y\). Then \({\cal A}=\{x\in {\cal X}:\exist y\in{\cal B}, (x, y)\in {\cal C} \}\) is convex set if non-empty, and \(g(x)=\inf _{y\in\cal B} f(x, y)\) for all \(x\in \cal A\) is convex function.
For example, the distance to convex set \(\cal B\), \(d(x)=\inf _{y\in \cal B}\Vert x-y\Vert\) is convex function
Th. Jensen's inequality
Let r.v. \(X\) in convex set \({\cal C}\sube \mathbb{R} ^N\), and convex function \(f\) defined over \(\cal C\). Then, \(\mathbb{E}[X]\in {\cal C}, \mathbb{E}[f(X)]\) is finite, and
Sketch of proof: extending \(f(\sum \alpha x)\le\sum \alpha f(x)\) and \(\sum \alpha=1\) that can be interpreted as probabilities, to arbitraty contributions.
Smoothness, strong convexity
参考 [https://zhuanlan.zhihu.com/p/619288199]
考虑二阶导的 lipschitz 连续性
Def. \(\beta\)-smooth
称函数 \(f\) 是 \(\beta\)-smooth 的,若
等价于如下命题均成立:
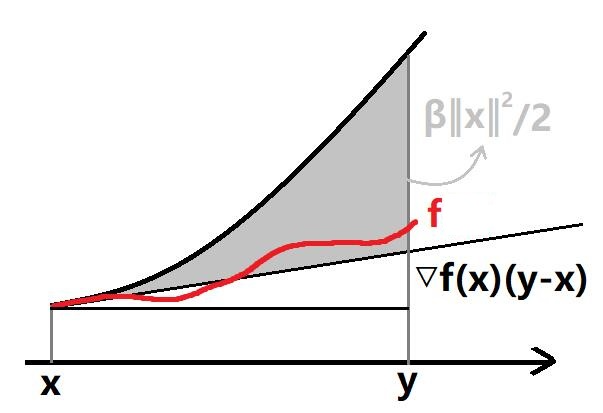
- \(\frac{\beta}{2}\Vert {\bf x}\Vert ^2 - f({\bf x})\) 是凸函数
- \(\forall{\bf x, y}\in\text{dom}(f),\quad f({\bf y})\le f({\bf x}) + \nabla f({\bf x}) ^\top ({\bf y-x}) + \frac{\beta}{2} \Vert{\bf y-x}\Vert ^2\)
- \(\nabla ^2 f({\bf x})\preceq \beta I\)
证明/说明
证明 \(g({\bf x})=\frac{\beta}{2}\Vert {\bf x}\Vert ^2 - f({\bf x})\) 为凸,可以考虑 \(\lang\nabla g({\bf x}) - \nabla g({\bf y}),{\bf x-y}\rang\ge 0\),应用柯西不等式可证
感性理解之,\(f\) 的起伏 “拗不过” \(\frac{\beta}{2}\Vert {\bf x}\Vert ^2\) 的凸性,即 \(f\) 起伏不够大,也就是比较平滑 smooth
证明第二、三条,代入 \(g({\bf y})-g({\bf x})\ge \nabla g({\bf x})\cdot({\bf y-x})\) 和 \(\nabla ^2 g({\bf x})\succeq 0\) 即可;它的几何含义见下
Def. \(\alpha\)-strongly convex
称函数 \(f\) 是 \(\alpha\)-strongly convex 的,若
- \(\forall{\bf x, y}\in\text{dom}(f),\quad \Vert\nabla f({\bf x}) - \nabla f({\bf y})\Vert\ge \alpha\Vert {\bf x-y}\Vert\)
- \(f({\bf x}) - \frac{\alpha}{2}\Vert {\bf x}\Vert ^2\) 是凸函数
- \(\forall{\bf x, y}\in\text{dom}(f),\quad f({\bf y})\ge f({\bf x}) + \nabla f({\bf x}) ^\top ({\bf y-x}) + \frac{\alpha}{2} \Vert{\bf y-x}\Vert ^2\)
- \(\nabla ^2 f({\bf x})\succeq \alpha I\)
Def. \(\gamma\)-well-conditioned
称函数 \(f\) 是 \(\gamma\)-well-conditioned 的,若其同时是 \(\alpha\)-strongly convex 和 \(\beta\)-smooth 的;定义 \(f\) 的 condition number 为 \(\gamma=\alpha /\beta\le 1\)
Th. Linear combination of two convex functions
- 考虑两个凸函数的加和,有:
- 若 \(f\) 为 \(\alpha _1\)-strongly convex,\(g\) 为 \(\alpha _2\)-strongly convex,则 \(f+g\) 为 \((\alpha _1+\alpha _2)\)-strongly convex
- 若 \(f\) 为 \(\beta _1\)-smooth,\(g\) 为 \(\beta _2\)-smooth,则 \(f+g\) 为 \((\beta _1 + \beta _2)\)-smooth
- 考虑凸函数的数乘 \(k>0\),有:
- 若 \(f\) 为 \(\alpha\)-strongly convex,则 \(kf\) 为 \((k\alpha)\)-strongly convex
- 若 \(f\) 为 \(\beta\)-smooth,则 \(kf\) 为 \((k\beta)\)-smooth
证明,利用凸函数满足 \(\lang\nabla f({\bf x}) - \nabla f({\bf y}),{\bf x-y}\rang\ge 0\) 和 \(\frac{\beta}{2}\Vert {\bf x}\Vert ^2 - f({\bf x}), f({\bf x}) - \frac{\alpha}{2}\Vert {\bf x}\Vert ^2\) 的凸性即可
Projections onto convex sets
之后的算法会涉及向凸集投影的概念;定义 \(\bf y\) 向凸集 \(\cal K\) 的投影,为
可以证明投影总是唯一的;投影还具有一个很重要的性质:
Th. Pythagorean theorem 勾股定理
凸集 \(\cal K\sube \mathbb{R} ^d,{\bf y}\in\mathbb{R} ^d,{\bf x}=\prod _{\cal K}({\bf y})\),则任意 \(\bf z\in\cal K\),\(\bf \Vert y-z\Vert\ge \Vert x-z\Vert\)
即,对凸集内的任一点,其到投影点的距离不大于其到被投影点的距离
Constrained optimization 带约束优化
Def. Constrained optimization problem
\({\cal X}\sube \mathbb{R} ^N,\ f, g _i:{\cal X}\to\mathbb{R}, i\in [m]\),则带约束优化问题(也称为 primal problem)的形式为
记 \(\inf _{\bf x\in\cal X} f({\bf x})=p ^ *\);注意到目前我们没有假设任何的 convexity;对于 \(g=0\) 的约束我们可以用 \(g\le 0, -g\le 0\) 来刻画
Dual problem and saddle point
解决这类问题,可以先引入拉格朗日函数 Lagrange function,将约束以非正项引入;然后转化成对偶问题
Def. Lagrange function
为带约束优化问题定义拉格朗日函数,为
其中 \({\boldsymbol{\alpha}}=(\alpha _1,\dotsb, \alpha _m)'\) 称为对偶变量 dual variable
对于约束 \(g=0\),其系数 \(\alpha=\alpha _+ - \alpha _-\) 不需要非负(但是下文给出定理时,要求 \(g,-g\) 同时为凸,从而 \(g\) 得是仿射函数 affine,即形如 \({\bf w\cdot x+b}\))
注意到 \(p ^ * = \inf _{\bf x} \sup _{\boldsymbol{\alpha}}{\cal L}({\bf x}, {\boldsymbol{\alpha}})\),因为当 \(\bf x\) 不满足约束时 \(\sup _{\boldsymbol{\alpha}}\) 可以取到无穷大,从而刻画了约束
有趣的来了,我们能构造一个 concave function,称为对偶函数 Dual function
Def. Dual function
为带约束优化问题定义对偶函数,为
它是 concave 的,因为 \(\cal L\) 是关于 \(\boldsymbol{\alpha}\) 的线性函数,且 pointwise infimum 保持了 concavity
同时注意到对任意 \({\boldsymbol{\alpha}}\),\(F({\boldsymbol{\alpha}})\le \inf _{\bf x\in\cal X}f({\bf x})=p ^ *\)
定义对偶问题
Def. Dual problem
为带约束优化问题定义对偶问题,为
对偶问题是凸优化问题,即求 concave 函数的最大值,记其为 \(d ^ *\);由上文可知 \(d ^ *\le p ^ *\),也就是:
称为弱对偶 weak duality,取等情况称为强对偶 strong duality
接下来会给出:
当凸优化问题满足约束规范性条件 constraint qualification (Slater's contidion) 时(此为充分条件),有 \(d ^ *=p ^ *\),且该解的充要条件为拉格朗日函数的鞍点 saddle point
Def. Constraint qualification (Slater's condition)
假设集合 \(\cal X\) 的内点非空 \(\text{int}({\cal X})\ne \empty\):
- 定义 strong constraint qualification (Slater's condition) 为
- 定义 weak constraint qualification (weak Slater's condition) 为
(这个条件是在说明解存在吗?)
基于 Slater's condition,叙述拉格朗日函数的鞍点 saddle point 是带约束优化问题的解的充要条件
Th. Saddle point - sufficient condition
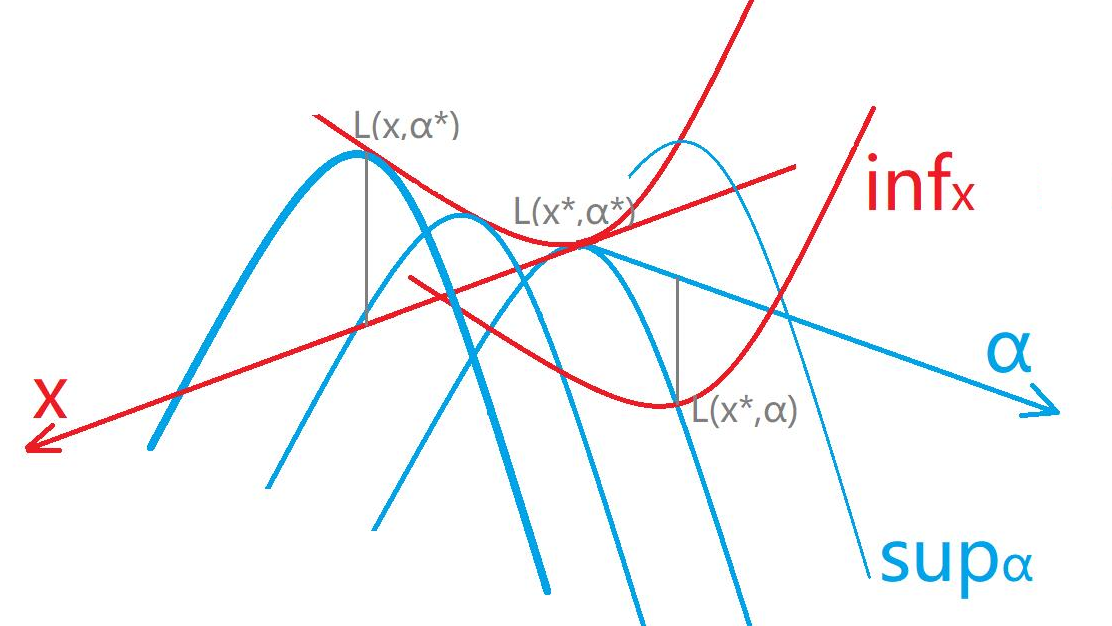
带约束优化问题,如果其拉格朗日函数存在鞍点 saddle point \(({\bf x} ^ *, \boldsymbol{\alpha} ^ *)\),即
则 \({\bf x} ^ *\) 是该问题的解,\(f({\bf x} ^ *)=\inf f({\bf x})\)
Th. Saddle point - necessary condition
假设 \(f, g _i, i\in [m]\) 为 convex function:
- 若满足 Slater's condition,则带约束优化问题的解 \(\bf x ^ *\) 满足存在 \(\boldsymbol{\alpha} ^ *\ge 0\) 使得 \(({\bf x} ^ *, \boldsymbol{\alpha} ^ *)\) 是拉格朗日函数的鞍点
- 若满足 weak Slater's condition 且 \(f, g _i\) 可导,则带约束优化问题的解 \(\bf x ^ *\) 满足存在 \(\boldsymbol{\alpha} ^ *\ge 0\) 使得 \(({\bf x} ^ *, \boldsymbol{\alpha} ^ *)\) 是拉格朗日函数的鞍点
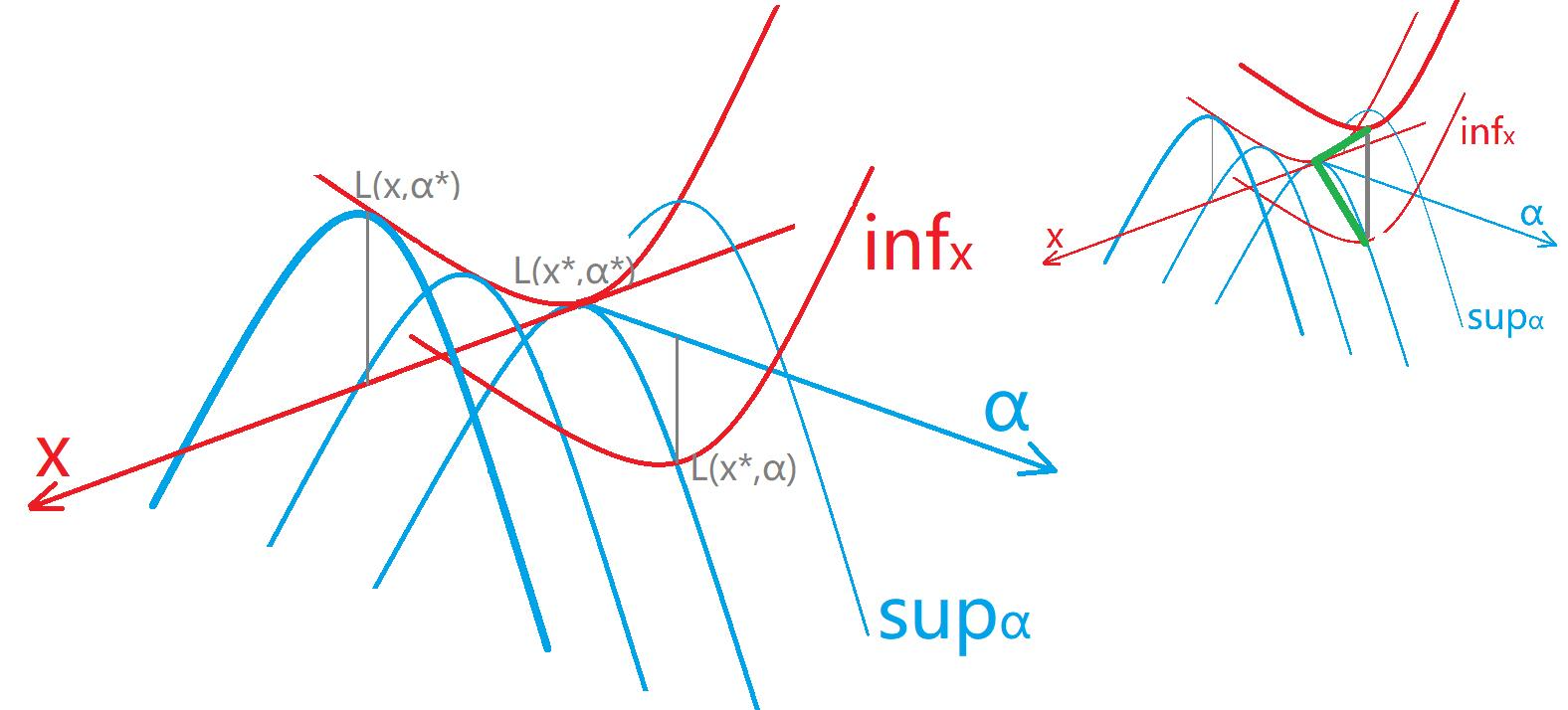
由于书本上没提供必要性的证明,且充分性证明不难但是不够漂亮,所以就不抄了,只给出我自己的思路(虽然可能有缺陷,下图也只是示意):
回到最初的不等式:\[d ^ * = \sup _{\boldsymbol{\alpha}} \inf _{\bf x} {\cal L}({\bf x}, {\boldsymbol{\alpha}})\le\inf _{\bf x} \sup _{\boldsymbol{\alpha}}{\cal L}({\bf x}, {\boldsymbol{\alpha}}) = p ^ * \]定义 \({\bf x} ^ *\) 取到 \(p ^ *=\sup _{\boldsymbol{\alpha}}{\cal L}({\bf x} ^ *, {\boldsymbol{\alpha}})\le \sup _{\boldsymbol{\alpha}}{\cal L}({\bf x}, {\boldsymbol{\alpha}}),\ \forall {\bf x}\)(可能有多个)
定义 \({\boldsymbol{\alpha}} ^ *\) 取到 \(d ^ *=\inf _{\bf x} {\cal L}({\bf x}, {\boldsymbol{\alpha} ^ *})\ge \inf _{\bf x} {\cal L}({\bf x}, {\boldsymbol{\alpha}}),\ \forall {\boldsymbol{\alpha}}\)(可能有多个)
(鞍点)唯一性和函数凸性有关(虽然感觉不严格凸的话可以是一片“平”的区域),留给之后再说吧
试证明:\(\cal L\) 存在鞍点、存在一组 \(({\bf x} ^ *, {\boldsymbol{\alpha}} ^ *)\) 是鞍点、\(p ^ * = d ^ *\)、\(p ^ * = d ^ * ={\cal L}({\bf x} ^ *, {\boldsymbol{\alpha}} ^ *)\) 四者等价
分别记为命题 \(A,B,C,D\),显然有 \(B\to A, D\to C\)
证明 \(A\to B, B\to CD\):
若存在鞍点(思路见图右上),记鞍点为 \(({\bf x}' , {\boldsymbol{\alpha}}')\),则 \({\cal L}({\bf x}', {\boldsymbol{\alpha}} ^ *){\color{green}\le} {\cal L}({\bf x}', {\boldsymbol{\alpha}}')=\inf _{\bf x}{\cal L}({\bf x}, {\boldsymbol{\alpha}}'){\color{green}\le} \inf _{\bf x} {\cal L}({\bf x}, {\boldsymbol{\alpha} ^ *})\),观察不等式两头则取等;进而有 \(\inf _{\bf x}{\cal L}({\bf x}, {\boldsymbol{\alpha}} ^ *)\le {\cal L}({\bf x}', {\boldsymbol{\alpha}} ^ *)= \inf _{\bf x}{\cal L}({\bf x}, {\boldsymbol{\alpha}}')\),根据 \(\boldsymbol{\alpha} ^ *\) 定义该不等式取等,于是可以令 \(\boldsymbol{\alpha} ^ *\leftarrow\boldsymbol{\alpha}'\);接下来对 \(\bf x ^ *,x'\) 同理
此时 \(({\bf x} ^ * , {\boldsymbol{\alpha}} ^ *)\) 是鞍点,即 \(\forall {\bf x},\forall {\boldsymbol{\alpha}},\ {\cal L}({\bf x} ^ *, {\boldsymbol{\alpha}})\le {\cal L}({\bf x} ^ *, {\boldsymbol{\alpha}} ^ *)\le {\cal L}({\bf x}, {\boldsymbol{\alpha}} ^ *)\),则有 \(p ^ * = \sup _{\boldsymbol{\alpha}}{\cal L}({\bf x} ^ *, {\boldsymbol{\alpha}}) = {\cal L}({\bf x} ^ *, {\boldsymbol{\alpha}} ^ *) = \inf _{\bf x} {\cal L}({\bf x}, {\boldsymbol{\alpha} ^ *}) = d ^ *\)证明 \(C\to BD\):
若 \(p ^ * =d ^ *\),即 \(\sup _{\boldsymbol{\alpha}}{\cal L}({\bf x} ^ *, {\boldsymbol{\alpha}})=\inf _{\bf x} {\cal L}({\bf x}, {\boldsymbol{\alpha} ^ *})\),且 \(\sup _{\boldsymbol{\alpha}}{\cal L}({\bf x} ^ *, {\boldsymbol{\alpha}})\ge {\cal L}({\bf x} ^ *, {\boldsymbol{\alpha} ^ *})\ge \inf _{\bf x} {\cal L}({\bf x}, {\boldsymbol{\alpha} ^ *})\);故三者取等,故 \(\forall {\bf x},\forall {\boldsymbol{\alpha}},\ {\cal L}({\bf x} ^ *, {\boldsymbol{\alpha}})\le \sup _{\boldsymbol{\alpha}}{\cal L}({\bf x} ^ *, {\boldsymbol{\alpha}})={\cal L}({\bf x} ^ *, {\boldsymbol{\alpha} ^ *})=\inf _{\bf x} {\cal L}({\bf x}, {\boldsymbol{\alpha} ^ *})\le {\cal L}({\bf x}, {\boldsymbol{\alpha} ^ *})\),从而 \(({\bf x} ^ * , {\boldsymbol{\alpha}} ^ *)\) 是鞍点综上得证。爽!
KKT conditions
Lagrangian version
若带约束优化问题满足 convexity,我们就可以用一个定理解决:KKT
Th. Karush-Kuhn-Tucker's theorem
假设 \(f, g _i:{\cal X}\to\mathbb{R},\forall i\in[m]\),为 convex and differentiable,且满足 Slater's condition;则带约束优化问题
其拉格朗日函数为 \({\cal L}({\bf x}, {\boldsymbol{\alpha}})=f({\bf x}) + {\boldsymbol{\alpha}}\cdot {\bf g}({\bf x}), {\boldsymbol{\alpha}}\ge 0\)
则 \(\bar{\bf x}\) 是该问题的解,当且仅当存在 \(\bar{\boldsymbol{\alpha}}\ge 0\),满足:
其中后两条称为互补条件 complementarity conditions,即对任意 \(i\in[m], \bar{\boldsymbol{\alpha}} _i\ge 0,g _i(\bar{\bf x})\le 0\),且满足 \(\bar{\boldsymbol{\alpha}} _i g _i(\bar{\bf x})=0\)
充要性证明:
必要性,\(\bar{\bf x}\) 为解,则存在 \(\bar{\boldsymbol{\alpha}}\) 使得 \((\bar{\bf x}, \bar{\boldsymbol{\alpha}})\) 为鞍点,从而得到 KKT 条件:第一条即鞍点定义,第二、三条:
\[\begin{aligned} \forall {{\boldsymbol{\alpha}}},{\cal L}(\bar{\bf x}, {\boldsymbol{\alpha}})\le{\cal L}(\bar{\bf x}, \bar{\boldsymbol{\alpha}})&\implies{\boldsymbol{\alpha}}\cdot {\bf g}(\bar{\bf x})\le \bar{\boldsymbol{\alpha}}\cdot {\bf g}(\bar{\bf x})\\{\boldsymbol{\alpha}}\to +\infty&\implies {\bf g}(\bar{\bf x})\le 0 \\ {\boldsymbol{\alpha}}\to 0 &\implies \bar{\boldsymbol{\alpha}}\cdot{\bf g}(\bar{\bf x})=0 \end{aligned} \]充分性,满足 KKT 条件,则对于满足 \(\bf g({\bf x})\le 0\) 的 \(\bf x\):
\[\begin{aligned} f({\bf x}) - f(\bar{\bf x}) &\ge \nabla _{\bf x} f(\bar{\bf x})\cdot ({\bf x-\bar{x}}) & ;\text{convexity of $f$} \\ &= -\bar{\boldsymbol{\alpha}}\cdot \nabla _{\bf x} {\bf g}(\bar{\bf x})\cdot ({\bf x-\bar{x}}) &; \text{first cond}\\ &\ge -\bar{\boldsymbol{\alpha}}\cdot ({\bf g}({\bf x})-{\bf g}(\bar{\bf x})) &; \text{convexity of $g$}\\ &= -\bar{\boldsymbol{\alpha}}\cdot {\bf g}({\bf x}) \ge 0 &;\text{third cond} \end{aligned} \]
Gradient descent version
我们还能用另一种思路阐述 KKT 定理,并且也是另一种求解带约束优化问题的方法:梯度下降
由于 \(\bf g\) 均为凸函数,显然 \({\cal K}=\{\bf x:g(x)\le 0\}\) 为凸集;因此约束其实就是把取值限定在凸集 \(\cal K\) 上,于是有:
Th. Karush-Kuhn-Tucker's theorem, gradient descent version
假设 \(f\) 为 convex and differentiable,\(\cal K\) 为凸集;则带约束优化问题
则 \(\bf x ^ *\) 是该问题的解,当且仅当
其思想为,负梯度方向为 \(f\) 函数值下降的方向,若其与 \(\bf y-x ^ *\) 有相同方向的分量(内积大于零),则可以沿该方向移动,则 \(\bf x ^ *\) 不会是最优点
这个定理为我们的梯度下降算法提供了基础
Gradient descent
Unconstrained case
无约束凸优化问题的梯度下降 GD 算法
记 \(\nabla _t=\nabla f({\bf x} _t),h _t=f({\bf x} _t)-f({\bf x} ^ *),d _t = \Vert{\bf x} _t-{\bf x} ^ * \Vert\)
其中合理地选择 \(\eta _t\),决定了算法的效率;取 Polyak stepsize:\(\eta _t=\frac{h _t}{\Vert \nabla _t\Vert ^2}\),有:
Th. Bound for GD with Polyak stepsize
假设 \(\Vert \nabla _t\Vert\le G\),则
该定理的证明建立在 \(d _{t+1} ^2\le d _t ^2 - {h _t ^2}/{\Vert \nabla _t\Vert ^2}\) 上,这就感觉很扯淡了,因为用绝对值不等式放缩出来总是反的...
证明算法的效率时,可以用一些 “potential 势差” 函数来刻画,比如刻画势能 \(h _t = f({\bf x} _t)-f({\bf x} ^ *)\) 的降低,考虑势能差 \(h _{t+1}-h _t\)、梯度的范数 \(\Vert\nabla _t\Vert\);比如到最优点的距离 \(d _t = \Vert {\bf x-x} ^ *\Vert\) 的降低,考虑 \(d _{t+1}-d _t\);
先给出引理,代入 smooth 和 strong convexity 可以证明;这些式子方便我们后续进行放缩\[\frac{\alpha}{2}d _t ^2\le h _t\le \frac{\beta}{2}d _t ^2\\ \frac{1}{2\beta}\Vert \nabla _t \Vert ^2\le h _t\le \frac{1}{2\alpha}\Vert \nabla _t \Vert ^2 \]对于更新式 \({\bf x} _{t+1} = {\bf x} _t - \eta _t \nabla _t\),如果考虑 \(d _{t+1}-d _t\),那就两边同减 \(\bf x ^ *\) 并取范数,用三角不等式放缩,但是符号和上文的假设是反的,到此就证不下去了;如果假定 \(d _{t+1} ^2\le d _t ^2 - {h _t ^2}/{\Vert \nabla _t\Vert ^2}\),那就能证明上面的 bound(注意 \(f(\bar{\bf x})-f({\bf x} ^ * )\le \frac{1}{T}\sum _t h _t\) 可以不等式放缩)
不过,我们可以从 \(h _{t+1}-h _t\) 出发,有:\[\begin{aligned}h _{t+1}-h _t &= f({\bf x} _{t+1})-f({\bf x} _{t})\\ &\le \nabla f({\bf x} _t) ^\top({\bf x} _{t+1} - {\bf x} _{t})+\frac{\beta}{2}\Vert {\bf x} _{t+1}-{\bf x} _{t}\Vert ^2 \\ &= -\eta _t\Vert \nabla _t\Vert ^2+\frac{\beta}{2}\eta _t ^2\Vert \nabla _t\Vert ^2\\ &=-\frac{1}{2\beta}\Vert \nabla _t \Vert ^2\qquad ;\text{令 }\eta _t=\frac{1}{\beta} \\ &\le -\frac{\alpha}{\beta}h _t=-\gamma h _t\end{aligned} \]于是 \(h _{T}\le (1-\gamma) h _{T-1}\le (1-\gamma) ^T h _0\le e ^{-\gamma T} h _0\),这倒是个很不错的收敛保证,因此有
Th. Bound for GD, unconstrained case
假设 \(f\) 是 \(\gamma\)-well-conditioned,令 \(\eta _t=\frac{1}{\beta}\),则
Constrained case
带约束优化的梯度下降,只需要每次移动后,投影到凸集
它有个类似的上限:
Th. Bound for GD, constrained case
假设 \(f\) 是 \(\gamma\)-well-conditioned,令 \(\eta _t=\frac{1}{\beta}\),则
证明
首先是投影的定义\[\begin{aligned} {\bf x} _{t+1} &= \Pi _{\cal K}({\bf x} _t - \eta _t \nabla _t) \\ &= \text{argmin} _{\bf x} \Vert {\bf x} - {\bf x} _t + \eta _t \nabla _t \Vert \\ &= \text{argmin} _{\bf x}( \nabla _t ^\top ({\bf x - x} _t) + \frac{1}{2\eta _t}\Vert {\bf x - x} _t\Vert ^2 ) \end{aligned} \]根据如下式子,可以令 \(\eta _t=\frac{1}{\beta}\);从而有:
\[\begin{aligned} h _{t+1}-h _t &= f ({\bf x} _{t+1}) - f ({\bf x} _t) \\ &\le \nabla _t ^\top ({\bf x} _{t+1} - {\bf x} _t) + \frac{\beta}{2}\Vert {\bf x} _{t+1} - {\bf x} _t\Vert ^2 \\ &= \text{min} _{\bf x} (\nabla _t ^\top ({\bf x} - {\bf x} _t) + \frac{\beta}{2}\Vert {\bf x} - {\bf x} _t\Vert ^2) \end{aligned} \]为了摘掉 \(\min\),我们可以代入某个 \(\bf x\),代入哪个呢?可以考虑两点的连线,即 \((1-\mu){\bf x} _t + \mu {\bf x} ^ *\):
\[\begin{aligned} h _{t+1}-h _t &\le \text{min} _{\bf x\in [{\bf x} _t, {\bf x} ^ * ]} (\nabla _t ^\top ({\bf x} - {\bf x} _t) + \frac{\beta}{2}\Vert {\bf x} - {\bf x} _t\Vert ^2) \\ &\le \mu \nabla _t ^\top ({\bf x} ^ * - {\bf x} _t) +\mu ^2 \frac{\beta}{2}\Vert {\bf x} ^ * - {\bf x} _t \Vert ^2 \\ &\le -\mu h _t + \mu ^2 \frac{\beta-\alpha}{2}\Vert {\bf x} ^ * - {\bf x} _t \Vert ^2\quad; \alpha\text{-strong convex}\\ &\le -\mu h _t + \mu ^2\frac{\beta - \alpha}{\alpha}h _t \quad;\text{Lemma} \end{aligned} \]对 \(\mu\in[0,1]\) 取极值,得到
\[h _{t+1}\le h _t(1-\frac{\alpha}{4(\beta-\alpha)})\le h _t(1-\frac{\gamma}{4})\le h _t e ^{-\gamma/4} \]从而得证
GD: Reductions to non-smooth and non-strongly convex functions
现在来考虑梯度下降对不一定 smooth、或不一定 strong convex 的凸函数时该怎么分析;下文提到的 reduction 方法可以导出近似最优的收敛速度,而且很简单、很普适
Case 1. reduction to smooth, non-strongly convex functions
考虑仅有 \(\beta\)-smooth 情况;不过实际上,凸函数都是 \(0\)-strongly convex
做法为,加一个适当的 strongly-convex 函数,将原函数扳成更加 strongly-convex 的
取 \(\tilde{\alpha}=\frac{\beta\log T}{D ^2 T}\) 时,这个算法的效率为 \(h _T=O(\frac{\beta \log T}{T})\);对 GD 多加处理可以做到 \(O(\beta/T)\)
由于 \(f\) 是 \(\beta\)-smooth 和 \(0\)-strongly convex,加上一个 \(\tilde{\alpha}\)-smooth、\(\tilde{\alpha}\)-strongly convex 的 \(\Vert {\bf x- x} _0\Vert ^2\),由上述提到的凸函数求和的定理,\(g\) 为 \((\beta+\tilde{\alpha})\)-smooth 和 \(\tilde{\alpha}\)-strongly convex
因此,对于 \(f\),有:\[\begin{aligned}h _t &= f({\bf x} _t) - f({\bf x} ^ * ) \\ &= g({\bf x} _t) - g({\bf x} ^ * ) + \frac{\tilde{\alpha}}{2}(\Vert {\bf x} ^ * - {\bf x} _0\Vert ^ 2 - \Vert {\bf x} _t - {\bf x} _0\Vert ^2 ) \\ &\le h _0 ^g \exp ^{-\tilde{\alpha} t/4(\tilde{\alpha}+\beta)} + \tilde{\alpha}D ^2\qquad;\text{$D$ is diameter of bounded $\cal K$} \\ &=O(\frac{\beta \log t}{t}) \qquad;\text{choosing $\tilde{\alpha}=\frac{\beta\log t}{D ^2 t}$, ignore some constants} \end{aligned} \]
Case 2. reduction to strongly convex, non-smooth functions
考虑仅有 \(\alpha\)-strongly convex 的情况,考虑将其改造得更平缓的方法——平滑操作
最简单的平滑操作就是邻域取平均,记 \(f\) 平滑后的函数为 \(\hat{f}_{\delta}:\mathbb{R} ^d\to\mathbb{R}\),记 \(\mathbb{B}=\{{\bf v}:\Vert \bf v\Vert\le 1\}\),取半径为 \(\delta\) 的球域做平均,用期望表示为:
这种平滑方法具有如下性质,假设 \(f\) 是 \(G\)-Lipschitz 连续:
- 若 \(f\) 是 \(\alpha\)-strongly convex,则 \(\tilde{f} _\delta\) 也是 \(\alpha\)-strongly convex
- \(\hat{f} _\delta\) 是 \((dG/\delta)\)-smooth
- 任意 \(\bf x\in\cal K\),\(|\hat{f} _\delta({\bf x}) - f({\bf x})|\le \delta G\)
证明:
第一条利用凸函数的线性组合,对于 \(\hat{f}_{\delta}({\bf x})=\int _{\bf v}\Pr[{\bf v}]f({\bf x+\delta v}){\rm d}{\bf v}\),由于任意 \(\bf v\),函数 \(f({\bf x+\delta v})\) 都是 \(\alpha\)-strongly convex 的,因此考察强凸性时,直接提出得到 \(\alpha\int _{\bf v}\Pr[{\bf v}]{\rm d}{\bf v}=\alpha\);同时可见即使不是均匀分布,依然是这个结论
第二条利用斯托克斯公式,由于是均匀分布,可以将其转化为球面 \(\mathbb{S}=\{{\bf v:\Vert v\Vert}=1\}\) 上的积分\[\mathbb{E} _{\bf v\sim\mathbb{S}}[f({\bf x+\delta v}){\bf v}]=\frac{\delta}{d}\nabla \hat{f} _\delta({\bf x}) \]再利用 \(\Vert \nabla f({\bf x})-\nabla f({\bf y})\Vert \le \Vert{\bf x-y}\Vert\) 可证明 smoothness,其步骤和第三条的证明类似
第三条的证明为:\[\begin{aligned}|\hat{f} _\delta({\bf x}) - f({\bf x})| &= \Big|\mathbb{E} _{{\bf v}\sim U(\mathbb{B})}[f({\bf x+\delta v})]-f({\bf x})\Big| \\ &\le \mathbb{E} _{{\bf v}\sim U(\mathbb{B})}\Big[|f({\bf x+\delta v})-f({\bf x})|\Big]&;\text{Jensen} \\ &\le \mathbb{E} _{{\bf v}\sim U(\mathbb{B})}\Big[ G\Vert\delta {\bf v}\Vert \Big]&;\text{Lipschitz} \\ &\le G\delta \end{aligned}\]
从而算法为:
取 \(\delta=\frac{dG}{\alpha}\frac{\log t}{t}\) 时,该算法的效率为 \(h _T=O(\frac{G ^2 d\log t}{\alpha t})\)
暂不考虑如何计算 \(\hat{f} _\delta\) 的梯度,后面会给出估计方法
首先 \(\hat{f} _{\delta}\) 是 \(\frac{\alpha\delta}{dG}\)-well-conditioned\[\begin{aligned}h _t &=f({\bf x} _t)-f({\bf x} ^ * ) \\ &\le \hat{f} _\delta({\bf x} _t) - \hat{f} _\delta({\bf x} ^ * ) + 2\delta G &;\text{for }|\hat{f} _\delta({\bf x}) - f({\bf x})|\le \delta G \\ &\le h _0 e ^{-\frac{\alpha\delta t}{4dG}} + 2\delta G \\ &=O(\frac{d G ^2\log t}{\alpha t}) &;\delta=\frac{dG}{\alpha}\frac{\log t}{t}\end{aligned} \]
另外,如果在原函数 \(f\) 直接做 GD 的话,依然有收敛保证,但是我们需要取序列的加权和:
令 \(\eta _t=\frac{2}{\alpha(t+1)}\),得到迭代序列 \({\bf x} _1,\dotsb, {\bf x} _t\),则
证明略
Case 3. reduction to general convex functions (non-smooth, non-strongly convex)
如果同时使用上述两个方法,会得到一个 \(\tilde{O}(d/\sqrt{t})\) 的方法,不过它得依赖 \(d\)
在 OCO 问题中会给出一个 \(O(1/\sqrt{t})\) 更一般算法
Fenchel duality
凸优化问题,对 \(f\) 不可导或者有无穷大的值的情况进行分析

 浙公网安备 33010602011771号
浙公网安备 33010602011771号