简单感知器模型解决简单真值表问题
实验四 简单感知器模型
一、实验目的
1. 掌握简单感知器模型的基本原理。
2. 复习VB、VC的基本概念、基本语法和编程方法,并熟练使用VB、VC编写简单感知器模型程序。
二、实验设备
微机
三、实验原理
简单感知器模型的基本原理:将样本矢量X输入到感知器中,得到实际输出y,再用y与期望输出d的差来修正下一步的权值。
感知器中神经元定义如下: 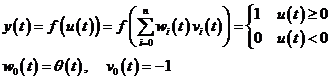
感知器的连接权定义为可变化的,感知器的训练(学习)是通过监督学习过程来实现的。简单感知器引入的学习算法称为误差学习算法,该算法步骤如下:
①选择一组初始权值wi(0);
②计算输入样本Xj所对应的实际输出y(t)与期望输出dj的误差dj=|dj-y(t)|;
③如果dj小于阈值T1,转第⑤步;否则继续;
④更新权值: 。式中,wi(t)是第t步时神经元间的连接权,阈值可视为输入恒为-1的一个权值;η称为学习步长,是区间(0, 1)上的一个数,它的取值与训练速度和w收敛的稳定性有关,η可以是常数,但为了改进收敛速度,也可以采用变步长。
。式中,wi(t)是第t步时神经元间的连接权,阈值可视为输入恒为-1的一个权值;η称为学习步长,是区间(0, 1)上的一个数,它的取值与训练速度和w收敛的稳定性有关,η可以是常数,但为了改进收敛速度,也可以采用变步长。
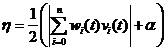
式中,a是一个正的常数。
⑤若所有样本都学习完成,计算所有样本误差之和 ,如果E小于阈值T2,学习结束;否则,转到第②步。
,如果E小于阈值T2,学习结束;否则,转到第②步。
四、预习要求
1. 认真阅读教材中简单感知器模型的基本原理。
2. 复习VB、VC的基本概念、基本语法和编程方法。
五、实验内容及步骤
1. 上机编写程序,在简单感知器上,,用误差学习算法实现真值表。
|
x1 |
x2 |
y=x1Ùx2 |
y=x1Úx2 |
y=Øx1 |
|
0 |
0 |
0 |
0 |
1 |
|
0 |
1 |
0 |
1 |
1 |
|
1 |
0 |
0 |
1 |
0 |
|
1 |
1 |
1 |
1 |
0 |
2. 调试程序。
3. 根据实验结果,写实验报告。
实验代码::::::::::::::
#include <stdio.h>
int x[5][3]; //输入数组
int y[5]; //期望输出
double w[5][3]; //权值
double n_la = 0.1 ;//步长
const int a_la = 1;//固定正常数
const double DELTA_T1 = 0.0;//总误差阀值
const double DELTA_T2 = 0.0;//小计算阀值
void intit()
{//初始化真值表输入
int i;
for(i=0; i<4; i++)
x[i][0] = -1;//第一项都为-1
x[0][1] = 0; x[0][2] = 0;
x[1][1] = 0; x[1][2] = 1;
x[2][1] = 1; x[2][2] = 0;
x[3][1] = 1; x[3][2] = 1;
//输入期望值
printf("请输入4个期望输入\n");
for(i=0; i<4; i++)
scanf("%d", &y[i]);
//初始化权值
w[0][0]=0.5; w[0][1]=0; w[0][2]=0;
}
double my_fabs(double temp)
{//取绝对值函数
if(temp < 0)
return -temp;
return temp;
}
int sgn(double temp)
{//f函数
if(temp >= 0)
return 1;
return 0;
}
void sa()
{//主要实现函数
double sum, delta_sum, yk, yk_temp;
int i, k;
while(1)
{
delta_sum=0; //记录总误差
for(k=0; k<4; k++)
{
for(i=0, sum=0; i<3; i++)
sum += w[k][i]*x[k][i];
n_la = 0.5*(my_fabs(sum) + a_la);//计算变步长
yk = sgn(sum);
if(my_fabs(y[k]- yk)<DELTA_T2)
{//期望和实际相等
yk_temp = 0;
}
else
{//期望和实际不相等
delta_sum+=my_fabs(y[k]-yk);
yk_temp = n_la * (y[k]-yk);
}
if(k < 3)
{//向后更新
for(i=0; i<3; i++)
{
w[k+1][i] = yk_temp*x[k][i] + w[k][i];
}
}
else
{//轮到最后向第一个更新
for(i=0; i<3; i++)
{
w[0][i] = yk_temp*x[k][i] + w[k][i];
}
}
}
if(delta_sum <= DELTA_T1)
break;
}
}
void output()
{//输出权值
int i;
printf("输出一下权值先\n");
for(i=0; i<3; i++)
printf("w[%d]=%.2lf ",i,w[0][i]);
printf("\n");
}
void test()
{//测试一下权值
int i;
int a[3];
printf("测试输入x1,x2 ");
a[0] = -1;
double ys=0;
scanf("%d%d", &a[1], &a[2]);
for(i=0; i<3; i++)
ys += w[0][i]*a[i];
ys = sgn(ys);
printf("测试出y=%0.lf\n", ys);
}
int main()
{
int i, j;
for(i=0; i<3; i++)
{//三种总情况
intit();
sa();
output();
for(j=0; j<4; j++)//四种输入情况
test();
}
return 0;
}

