
N76E003之IO控制
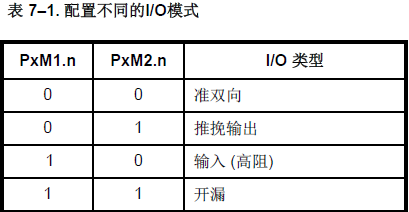
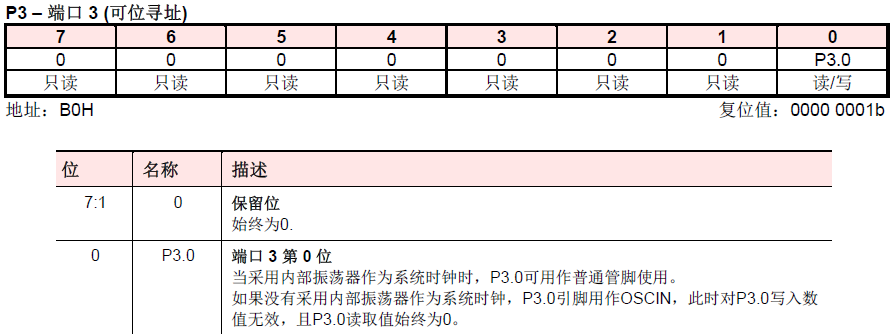
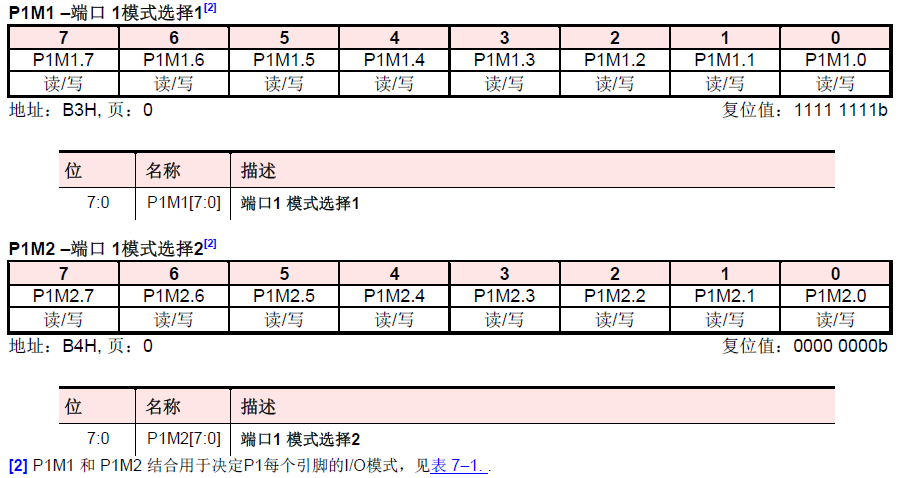
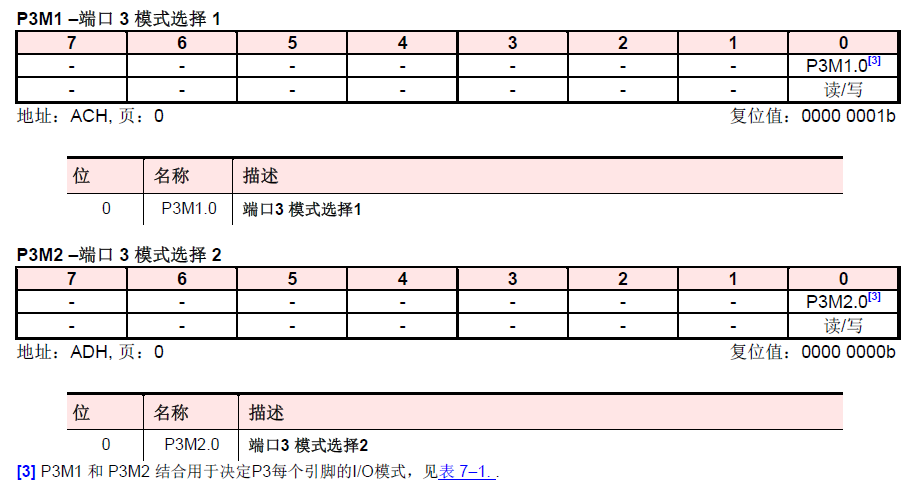
N76E003最多支持26个可位寻址的通用I/O引脚,分成4组 P0 到 P3 。每一个端口有它的端口控制寄存器(Px)。端口控制寄存器的写和读有不同的意思。写端口控制寄存器设置输出锁存逻辑值,读端口引脚的逻辑状态。所有I/O引脚(除P2.0)可以被软件独立配置成四种I/O模式中的一种。这四种模式是准双向模式(标准8051端口结构)、推挽输出、输入和开漏模式。每一个端口通过两个特殊功能寄存器PxM1 和 PxM2来选择端口Px的I/O模式。下表指示如何选择Px.n的I/O模式。注意任何复位之后,默认的配置是高阻输入模式。
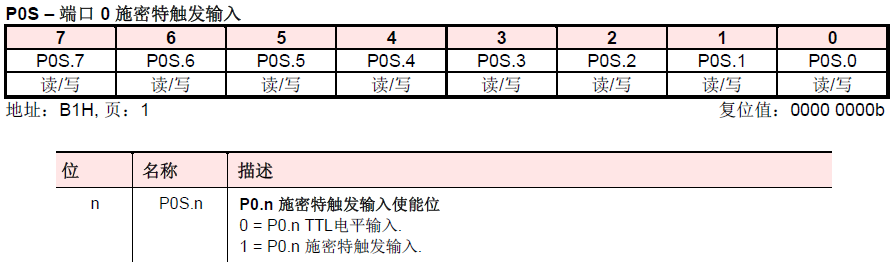
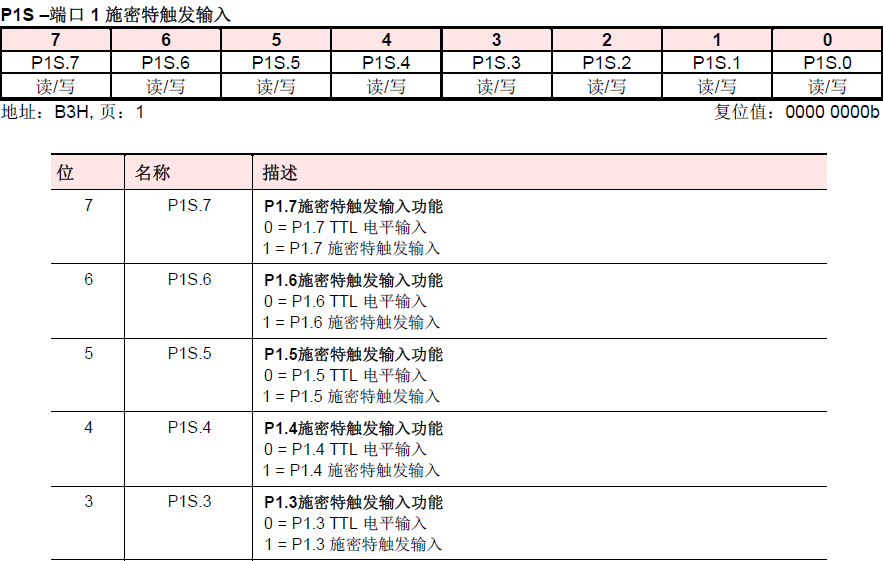
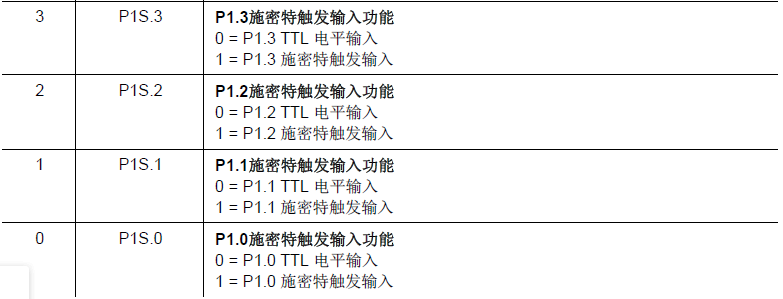
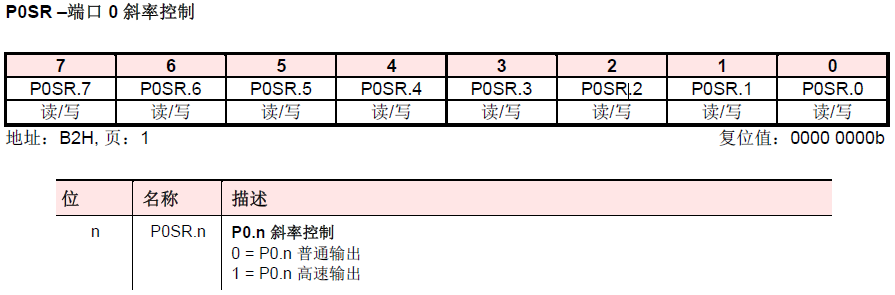
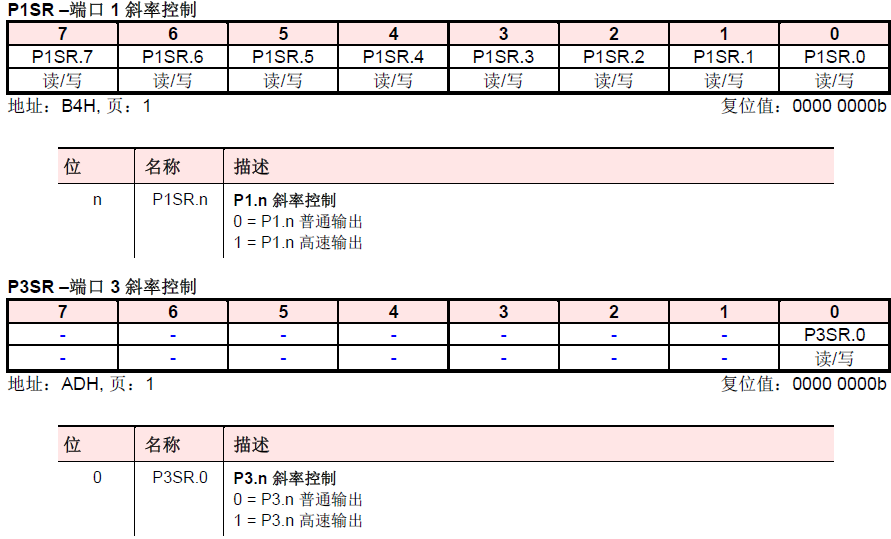
所有I/O引脚可以通过PxS寄存器里对应的位选择为TTL电平输入或施密特触发输入 。施密特触发输入有更好的抗干扰能力。所有的I/O引脚可通过软件选择位控制,斜率输出能力。输出斜率控制寄存器是PxSR。默认是慢斜率。.如果用户想要增加I/O引脚输出速率,设置PxSR的相应位,将斜率设置成高速输出。
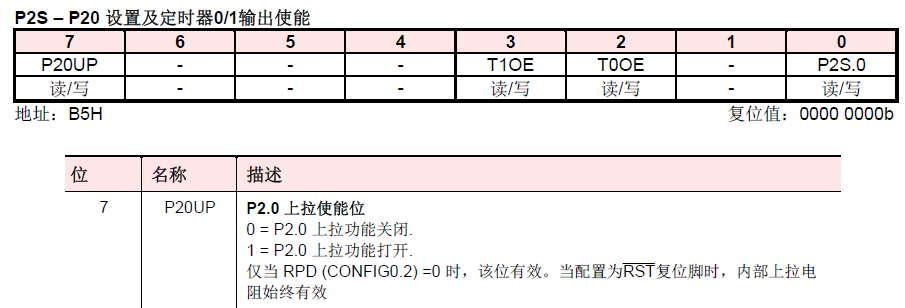
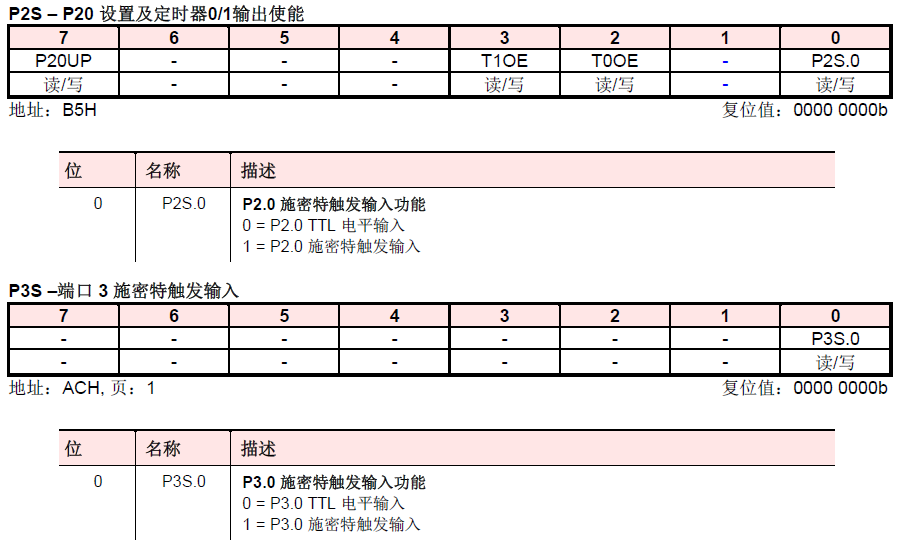
当配置RPD (CONFIG0.2) 为0,P2.0被配置为输入引脚。同时P2.0将永远在输入模式和施密特触发模式,通过P20UP(P2S.7)使能内部上拉电阻。如果RPD未编程,P2.0作为外部复位引脚,P2.0作为管脚功能无效,由于作为复位脚,内部上拉电阻始终有效,此种状态下读取P2.0的值始终为0.
准双向模式
准双向模式作为标准8051的I/O结构,可以同时用作输入和输出。当端口输出逻辑高时,驱动能力较弱,同时允许外部器件将电平拉低。当引脚被拉低时有强驱动能力,会吸收大电流。在准双向I/O 结构中,有三个上拉MOS管,适应不同的应用。其中一个上拉叫做特弱上拉,当端口锁定在逻辑1时,打开特弱上拉,特弱上拉有很小电流将引脚拉高。
第二种上拉为“弱上拉”,当外部端口引脚自身处于逻辑1时打开。这种上拉提供源电流以使准双向引脚输出1。如果引脚为逻辑1,被外部器件拉低, “弱上拉”关闭, 仅有“特弱上拉”打开。 此时要将引脚拉低,外部器件要有足够的灌电流 (大于ITL)以克服“弱上拉”,并使端口的电压低于输入门限电压 (低于VIL)。
第三种上拉为“强上拉”。这种上拉用于在准双向口引脚上,加速端口电平由逻辑0转为逻辑1的转换速度。 当这种
情况发生时,打开强上拉用两个CPU时钟的时间快速地将端口引脚拉高。 然后就关闭,弱上拉和特弱上拉继续
保持该端口引脚为高。 准双向端口结构如下所示。
推挽模式
推挽输出模式与准双向输出模式有相同的下拉结构。当端口锁定为1时,提供持续的强上拉。推挽输出模式用于需要从端口输出大电流时的应用。
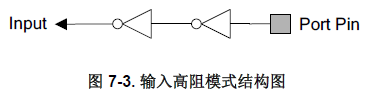
输入高阻模式
输入模式提供真实的高阻输入路径。虽然准双向模式也可以作为输入引脚,但是它需要相对强的输入源。输入模式的好处是减少在逻辑0时电流的消耗,如果是准双向模式,逻辑0时总是消耗来自VDD 的电流。用户需要注意的是,输入模式应该由外部设备或电阻提供一个确定的电平。悬浮的引脚在掉电状态下会引起漏电。
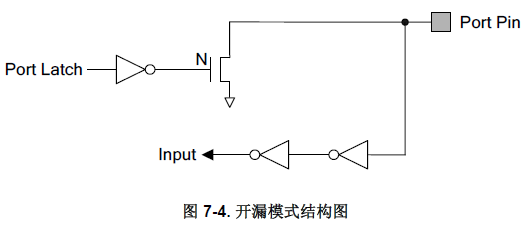
开漏模式
开漏输出配置关闭所有内部上拉,当端口锁定为逻辑0时,仅打开驱动端口的下拉晶体管。当端口锁存为逻辑1
时,它就和输入模式一样。通常用于I2C输出线上,开漏引脚需要加一个外部上拉电阻,典型连一个电阻到
VDD。 用户需要注意的是,开漏模式输出逻辑1的时候,应该由外部设备或电阻提供一个确定的电平。悬浮的引
脚在掉电状态下会引起漏电。
读-修改-写 指令
从SFR或内部RAM读一个字节,修改它,并重新写回去的指令,叫做读-修改-写指令。当目标是一个I/O端口或
一个端口位,这些指令读内部输出锁存而不是外部引脚的状态,这种指令读端口SFR的值,修改它并写回到SFR
端口。所有读-修改-写的指令如下所列:
指令 描述
ANL 逻辑 与. (ANL direct, A and ANL direct, #data)
ORL 逻辑 或. (ORL direct, A and ORL direct, #data)
XRL 逻辑 异或 OR. (XRL direct, A and XRL direct, #data)
JBC if bit = 1 转跳指令并清除. (JBC bit, rel)
CPL 位取反. (CPL bit)
INC 加一指令. (INC direct)
DEC 减一指令. (DEC direct)
DJNZ 减一不为零转跳指令. (DJNZ direct, rel)
MOV bit, C 移进位标志到位. (MOV bit, C)
CLR bit 清位. (CLR bit)
SETB bit 置位. (SETB bit)
最后三条指令看似不是明显的读-修改-写指令,实际它们就是读-修改-写指令。 可以读整个端口锁定值,修改改变位,写入新的值。
管脚控制寄存器
N76E003有许多I/O控制寄存器提供灵活的各种应用。和I/O端口相关的SFRs可以分类成四组:输入输出控制,输出模式控制、输入类型和灌电流控制,输出斜率控制。所有SFRs如下所列:
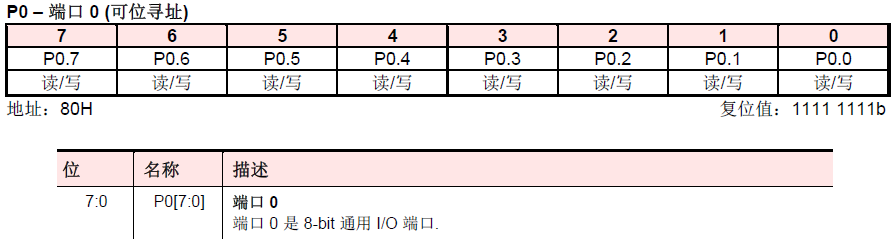
输入输出数据控制
这些寄存器是I/O输入输出数据缓存。读获取I/O输入的数据。写驱动数据输出,所有这些寄存器都是可位寻址的。

输出模式控制
这些寄存器控制输出模式。配置为输出模式在四种模式中:输入模式、准双向模式、推挽或开漏模式。每一个引脚可以独立地配置。对P2.0引脚,有一个上拉电阻控制位是P2S.7。

输入类型
每一个 I/O 引脚可以独立地配置成TTL输入或施密特触发输入。注意所有PxS 寄存器通过切换SFR页到页1来访问。
输出斜率控制
N76E003可单独控制管脚输出斜率。默认情况下,管脚采用普通斜率模式。当用户切换到高速斜率模式时,每个管脚斜率可看到显著变化。注更改PxSR寄存器需要将SFR页切换到页1 。
#include "N76E003.h" #include "SFR_Macro.h" #include "Function_define.h" #include "Common.h" #include "Delay.h" //***************** The Following is in define in Fucntion_define.h *************************** //****** Always include Function_define.h call the define you want, detail see main(void) ******* //*********************************************************************************************** #if 0 ////------------------- Define Port as Quasi mode ------------------- //#define P00_Quasi_Mode P0M1&=~SET_BIT0;P0M2&=~SET_BIT0 //#define P01_Quasi_Mode P0M1&=~SET_BIT1;P0M2&=~SET_BIT1 //#define P02_Quasi_Mode P0M1&=~SET_BIT2;P0M2&=~SET_BIT2 //#define P03_Quasi_Mode P0M1&=~SET_BIT3;P0M2&=~SET_BIT3 //#define P04_Quasi_Mode P0M1&=~SET_BIT4;P0M2&=~SET_BIT4 //#define P05_Quasi_Mode P0M1&=~SET_BIT5;P0M2&=~SET_BIT5 //#define P06_Quasi_Mode P0M1&=~SET_BIT6;P0M2&=~SET_BIT6 //#define P07_Quasi_Mode P0M1&=~SET_BIT7;P0M2&=~SET_BIT7 //#define P10_Quasi_Mode P1M1&=~SET_BIT0;P1M2&=~SET_BIT0 //#define P11_Quasi_Mode P1M1&=~SET_BIT1;P1M2&=~SET_BIT1 //#define P12_Quasi_Mode P1M1&=~SET_BIT2;P1M2&=~SET_BIT2 //#define P13_Quasi_Mode P1M1&=~SET_BIT3;P1M2&=~SET_BIT3 //#define P14_Quasi_Mode P1M1&=~SET_BIT4;P1M2&=~SET_BIT4 //#define P15_Quasi_Mode P1M1&=~SET_BIT5;P1M2&=~SET_BIT5 //#define P16_Quasi_Mode P1M1&=~SET_BIT6;P1M2&=~SET_BIT6 //#define P17_Quasi_Mode P1M1&=~SET_BIT7;P1M2&=~SET_BIT7 //#define P20_Quasi_Mode P2M1&=~SET_BIT0;P2M2&=~SET_BIT0 //#define P30_Quasi_Mode P3M1&=~SET_BIT0;P3M2&=~SET_BIT0 ////------------------- Define Port as Push Pull mode ------------------- //#define P00_PushPull_Mode P0M1|=SET_BIT0;P0M2&=~SET_BIT0 //#define P01_PushPull_Mode P0M1|=SET_BIT1;P0M2&=~SET_BIT1 //#define P02_PushPull_Mode P0M1&=~SET_BIT2;P0M2|=SET_BIT2 //#define P03_PushPull_Mode P0M1&=~SET_BIT3;P0M2|=SET_BIT3 //#define P04_PushPull_Mode P0M1&=~SET_BIT4;P0M2|=SET_BIT4 //#define P05_PushPull_Mode P0M1&=~SET_BIT5;P0M2|=SET_BIT5 //#define P06_PushPull_Mode P0M1&=~SET_BIT6;P0M2|=SET_BIT6 //#define P07_PushPull_Mode P0M1&=~SET_BIT7;P0M2|=SET_BIT7 //#define P10_PushPull_Mode P1M1&=~SET_BIT0;P1M2|=SET_BIT0 //#define P11_PushPull_Mode P1M1&=~SET_BIT1;P1M2|=SET_BIT1 //#define P12_PushPull_Mode P1M1&=~SET_BIT2;P1M2|=SET_BIT2 //#define P13_PushPull_Mode P1M1&=~SET_BIT3;P1M2|=SET_BIT3 //#define P14_PushPull_Mode P1M1&=~SET_BIT4;P1M2|=SET_BIT4 //#define P15_PushPull_Mode P1M1&=~SET_BIT5;P1M2|=SET_BIT5 //#define P16_PushPull_Mode P1M1&=~SET_BIT6;P1M2|=SET_BIT6 //#define P17_PushPull_Mode P1M1&=~SET_BIT7;P1M2|=SET_BIT7 //#define P20_PushPull_Mode P2M1&=~SET_BIT0;P2M2|=SET_BIT0 //#define P30_PushPull_Mode P3M1&=~SET_BIT0;P3M2|=SET_BIT0 ////------------------- Define Port as Input Only mode ------------------- //#define P00_Input_Mode P0M1|=SET_BIT0;P0M2&=~SET_BIT0 //#define P01_Input_Mode P0M1|=SET_BIT1;P0M2&=~SET_BIT1 //#define P02_Input_Mode P0M1|=SET_BIT2;P0M2&=~SET_BIT2 //#define P03_Input_Mode P0M1|=SET_BIT3;P0M2&=~SET_BIT3 //#define P04_Input_Mode P0M1|=SET_BIT4;P0M2&=~SET_BIT4 //#define P05_Input_Mode P0M1|=SET_BIT5;P0M2&=~SET_BIT5 //#define P06_Input_Mode P0M1|=SET_BIT6;P0M2&=~SET_BIT6 //#define P07_Input_Mode P0M1|=SET_BIT7;P0M2&=~SET_BIT7 //#define P10_Input_Mode P1M1|=SET_BIT0;P1M2&=~SET_BIT0 //#define P11_Input_Mode P1M1|=SET_BIT1;P1M2&=~SET_BIT1 //#define P12_Input_Mode P1M1|=SET_BIT2;P1M2&=~SET_BIT2 //#define P13_Input_Mode P1M1|=SET_BIT3;P1M2&=~SET_BIT3 //#define P14_Input_Mode P1M1|=SET_BIT4;P1M2&=~SET_BIT4 //#define P15_Input_Mode P1M1|=SET_BIT5;P1M2&=~SET_BIT5 //#define P16_Input_Mode P1M1|=SET_BIT6;P1M2&=~SET_BIT6 //#define P17_Input_Mode P1M1|=SET_BIT7;P1M2&=~SET_BIT7 //#define P20_Input_Mode P2M1|=SET_BIT0;P2M2&=~SET_BIT0 //#define P30_Input_Mode P3M1|=SET_BIT0;P3M2&=~SET_BIT0 ////-------------------Define Port as Open Drain mode ------------------- //#define P00_OpenDrain_Mode P0M1|=SET_BIT0;P0M2|=SET_BIT0 //#define P01_OpenDrain_Mode P0M1|=SET_BIT1;P0M2|=SET_BIT1 //#define P02_OpenDrain_Mode P0M1|=SET_BIT2;P0M2|=SET_BIT2 //#define P03_OpenDrain_Mode P0M1|=SET_BIT3;P0M2|=SET_BIT3 //#define P04_OpenDrain_Mode P0M1|=SET_BIT4;P0M2|=SET_BIT4 //#define P05_OpenDrain_Mode P0M1|=SET_BIT5;P0M2|=SET_BIT5 //#define P06_OpenDrain_Mode P0M1|=SET_BIT6;P0M2|=SET_BIT6 //#define P07_OpenDrain_Mode P0M1|=SET_BIT7;P0M2|=SET_BIT7 //#define P10_OpenDrain_Mode P1M1|=SET_BIT0;P1M2|=SET_BIT0 //#define P11_OpenDrain_Mode P1M1|=SET_BIT1;P1M2|=SET_BIT1 //#define P12_OpenDrain_Mode P1M1|=SET_BIT2;P1M2|=SET_BIT2 //#define P13_OpenDrain_Mode P1M1|=SET_BIT3;P1M2|=SET_BIT3 //#define P14_OpenDrain_Mode P1M1|=SET_BIT4;P1M2|=SET_BIT4 //#define P15_OpenDrain_Mode P1M1|=SET_BIT5;P1M2|=SET_BIT5 //#define P16_OpenDrain_Mode P1M1|=SET_BIT6;P1M2|=SET_BIT6 //#define P17_OpenDrain_Mode P1M1|=SET_BIT7;P1M2|=SET_BIT7 //#define P20_OpenDrain_Mode P2M1|=SET_BIT0;P2M2|=SET_BIT0 //#define P30_OpenDrain_Mode P3M1|=SET_BIT0;P3M2|=SET_BIT0 ////--------- Define all port as quasi mode --------- //#define Set_All_GPIO_Quasi_Mode P0M1=0;P0M1=0;P1M1=0;P1M2=0;P2M1=0;P2M2=0;P3M1=0;P3M2=0 #endif /*------------------------------------------------ The main C function. Program execution starts here after stack initialization. ------------------------------------------------*/ void main (void) { // unsigned char temp; Set_All_GPIO_Quasi_Mode; // Define in Function_define.h #if 0 InitialUART0_Timer3(115200); // set_CLOEN; // For clock out from P1.1 while(1) { clr_GPIO1; // Tiny board GPIO1 LED define P0 = 0x00; P2 = 0x00; P1 = 0x00; Timer0_Delay1ms(30); P0 = 0xff; P2 = 0xff; P1 = 0xff; set_GPIO1; Send_Data_To_UART0(0x35); //UART0 send ascii "U" temp = 0x31 + P0; Send_Data_To_UART0(temp); temp = 0x31 + P1; Send_Data_To_UART0(temp); Timer0_Delay1ms(30); } #endif #if 1 while(1) { clr_GPIO1; // Tiny board GPIO1 LED define P0 = 0x00; P2 = 0x00; P1 = 0x00; Timer0_Delay1ms(30); P0 = 0xff; P2 = 0xff; P1 = 0xff; set_GPIO1; Timer0_Delay1ms(30); } #endif }
我自己写的一个根据例程驱动继电器的例程,额,怎么说呢,就改了
//*********************************************************************************************************** // File Function: N76E003 Timer0/1 Mode1 demo code //*********************************************************************************************************** #include "N76E003.h" #include "Common.h" #include "Delay.h" #include "SFR_Macro.h" #include "Function_define.h" //***************** The Following is in define in Fucntion_define.h *************************** //****** Always include Function_define.h call the define you want, detail see main(void) ******* //*********************************************************************************************** #if 0 #endif #define TH0_INIT 50000 #define TL0_INIT 50000 UINT8 u8TH0_Tmp,u8TL0_Tmp,u8TH1_Tmp,u8TL1_Tmp; int i=0; /************************************************************************************************************ * TIMER 0 interrupt subroutine ************************************************************************************************************/ void Timer0_ISR (void) interrupt 1 //interrupt address is 0x000B { i++; TH0 = u8TH0_Tmp; TL0 = u8TL0_Tmp; if(i==200) { P12 =1; i=0; } } void main (void) { P12_PushPull_Mode; clr_GPIO1; TIMER0_MODE1_ENABLE; clr_T1M; u8TH0_Tmp = (65536-TH0_INIT)/256; u8TL0_Tmp = (65536-TL0_INIT)%256; TH0 = u8TH0_Tmp; TL0 = u8TL0_Tmp; set_ET0; //enable Timer0 interrupt set_EA; //enable interrupts set_TR0; //Timer0 run while(1); }
准双向是一个没有那么大的驱动电流,驱动不了电机所以选择推挽模式。


