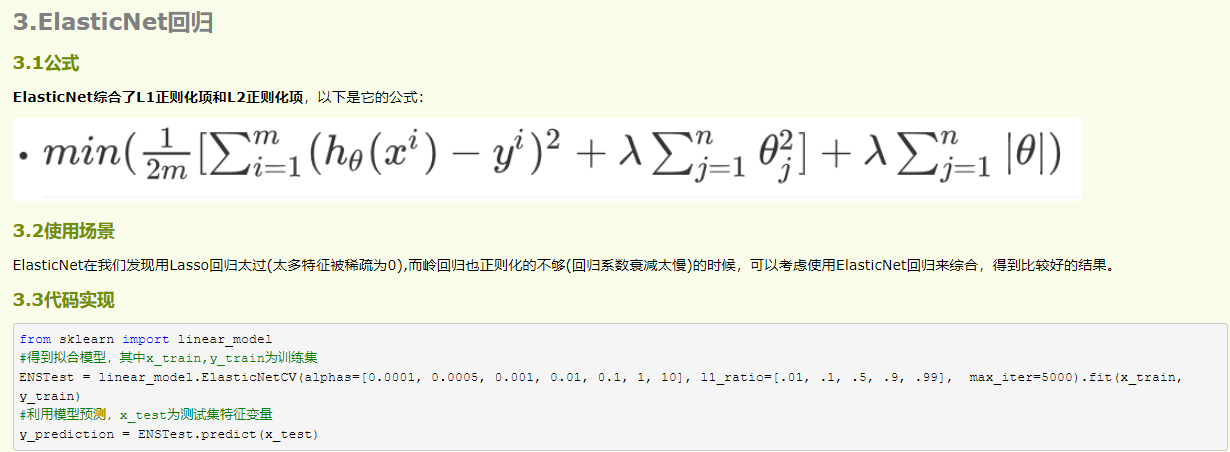
L1 L2正则化
范数
0范数
\(L_0\)范数表示为向量中非0元素的个数
1范数
向量中元素绝对值的和,也就是\(x\)与0之间的曼哈顿距离
2范数
\(x\)与0之间的欧式范数, 也就是向量中的每个数的平方之和
p范数
正则化的来源
正则化主要是用来控制模型的复杂度, 从而控制过拟合
做法:一般在损失函数中加入惩罚项
\(w\)显然, 是参数, \(\alpha\)控制正则化的强弱, 是一个常数
从下图讲解:
- 准确率: 右>左
- 模型复杂度: 右>左
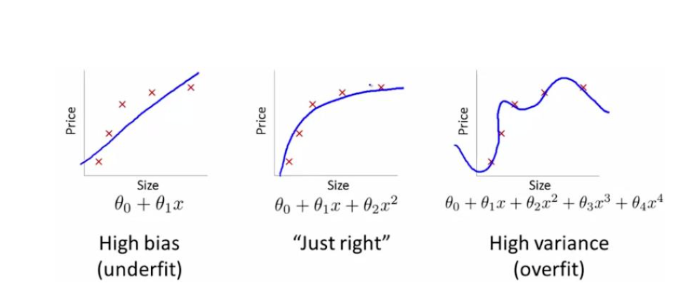
但是在测试的时候, 会出现过拟合的模型, 泛化效果变差的现象
为什么\(L_1\)和\(L_2\)能减小过拟合?
ML的目的是获得做好的参数\(w\), 并让模型的泛化能力更好
当模型复杂的时候, 相应的\(w\)也变多, 于是产生可过拟合现象, 为了降低模型的复杂度, 可以考虑适当的减少参数,代价就是准确率会适当的下降
如何减小参数?: 让\(w\)中的部分元素为0,也就是限制\(w\)中非0元素的个数
那么非0个数如何表示--> \(L_0\)范数, 于是我们有优化问题:
最小化损失, 并且约束是 非0元素的个数, 小于一定的值, 但是这个约束, 不好优化
于是有了\(L_1,L_2\)
初衷是限制w元素0的个数, 但可不可以这样?: 让\(w\)中的某些元素, 尽可能的趋近于0
\(||w|| \leq C\) 或者 \(||w||_2 \leq C\)
那么就可以发现, 刚好, 这是1 2 范数
那么可以得到优化问题
然后开始解优化问题, 一般具有约束的优化问题, 可以用拉格朗日函数
上式也可写成
然后按没有正则化时的计算方式一样, 求偏导,令其为0,求\(w\)就可以了, 这样的化, 和\(\alpha C\)就没有关系了
树形结合
我们继续看对\(w\)的约束项
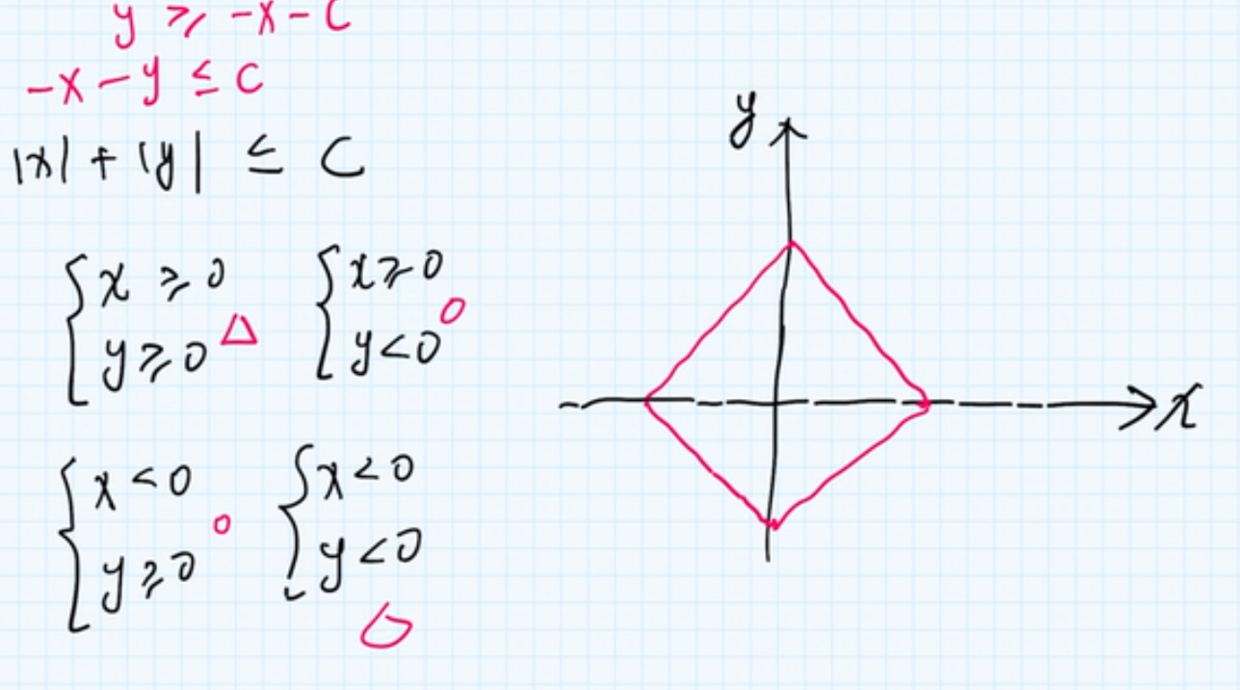
\(L_1\) 正则
从2维平面的角度来看, \(L_1\)为:
从数学的角度, 相当于时是一个菱形
回到问题上, 损失函数是一个等高线图:
那么. 带惩罚项的损失函数的解, 就是 正则项与损失的交点
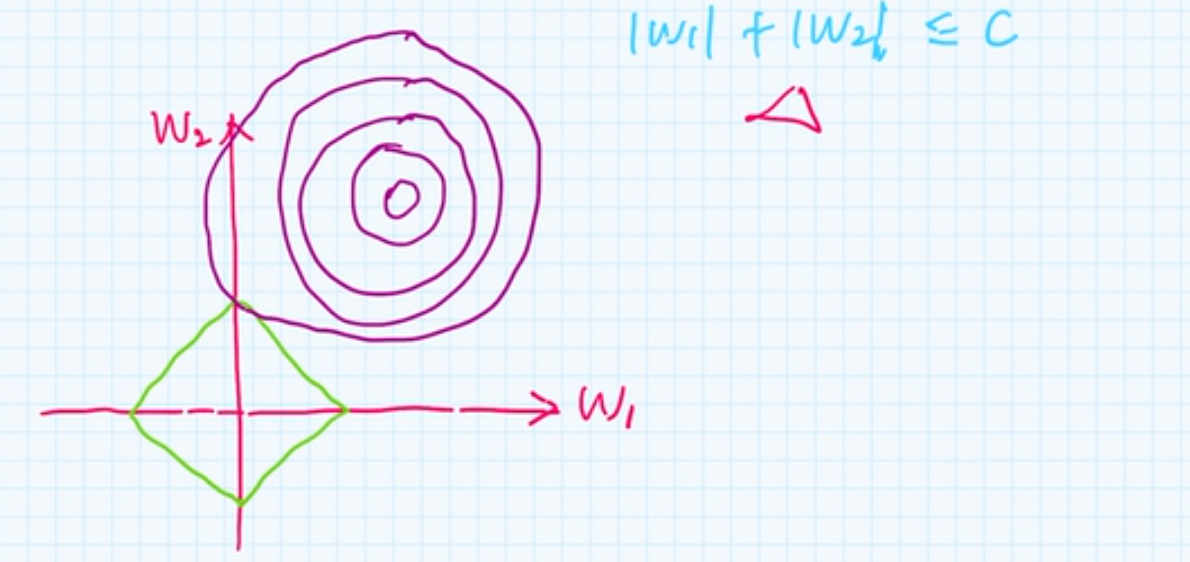
我们可以看到, 交点位置, \(w_1\)为0, 所以也得出一个结论
\(L_1\)正则可以产生稀疏向量,也就是,然某些权重元素为0, 在高维的时候, 交点越多, 也就越稀疏
\(L_2\)正则
本质上,这是半径为\(C\)的圆的公式
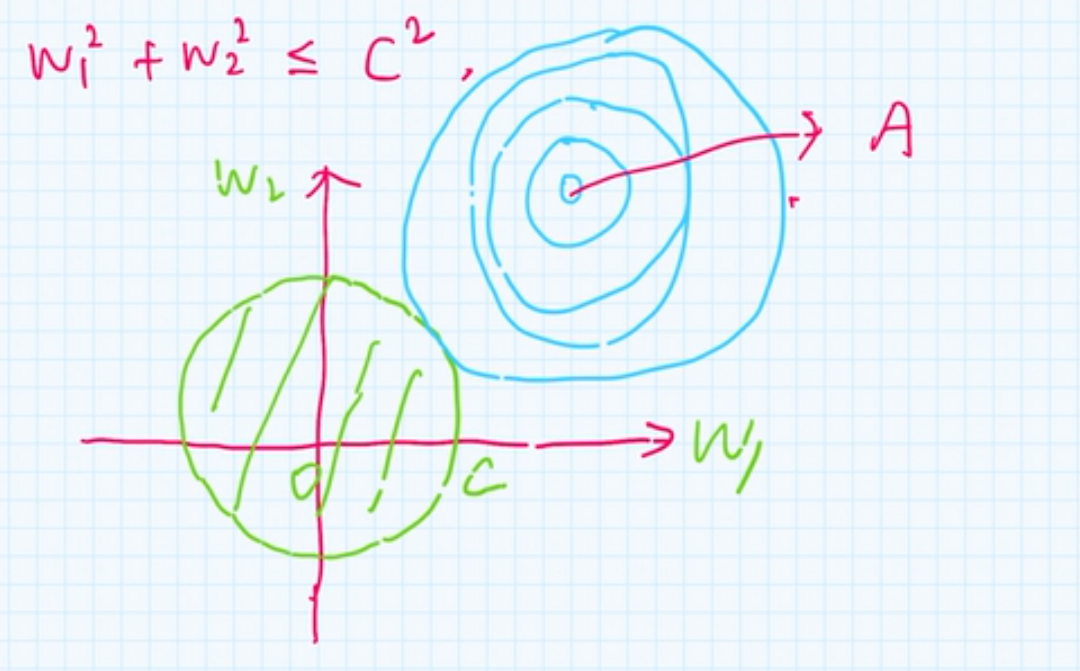
同样最优解在交点处, 且\(w_1,w_2\)不容易为0
L2范数是指向量各元素的平方和然后求平方根。我们让L2范数的规则项||W||2最小,可以使得W的每个元素都很小,都接近于0,但与L1范数不同,它不会让它等于0,而是接近于0,这里是有很大的区别的哦。而越小的参数说明模型越简单,越简单的模型则越不容易产生过拟合现象。
L1不可导如何解决?
1. 为什么不可导?
不可导得条件是:
- 函数在该点不连续
- 即使连续,函数的左右导数不等
L1表示: y=|x|, 虽然连续,但是在0的位置, 左导数=-1 右导数等于1,不可导
2. 如何解决?
-
使用坐标下降法
坐标轴下降法和梯度下降法具有同样的思想,都是沿着某个方向不断迭代,但是梯度下降法是沿着当前点的负梯度方向进行参数更新,而坐标轴下降法是沿着坐标轴的方向。
先初始化参数, 然后每一轮迭代, 选择一个参数经行优化, 其他参数保持固定
https://blog.csdn.net/xiaocong1990/article/details/83039802 -
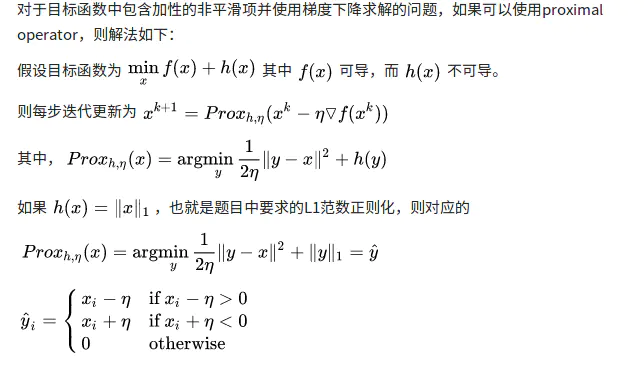
Proximal Algorithms 近端梯度下降
L1&L2一起作用也是可以的