
卡尔曼滤波
假设我养了一只猪:

一周前,这只猪的体重是46±0.5kg。注意,在这里我用了±0.5,表示其实我对这只猪一周前的体重并不是那么确定的,也就是说,46kg这个体重有0.5kg的误差。
现在,我又养了这只猪一个星期。那么我想要知道它一个星期之后多重,又大概有多少的误差?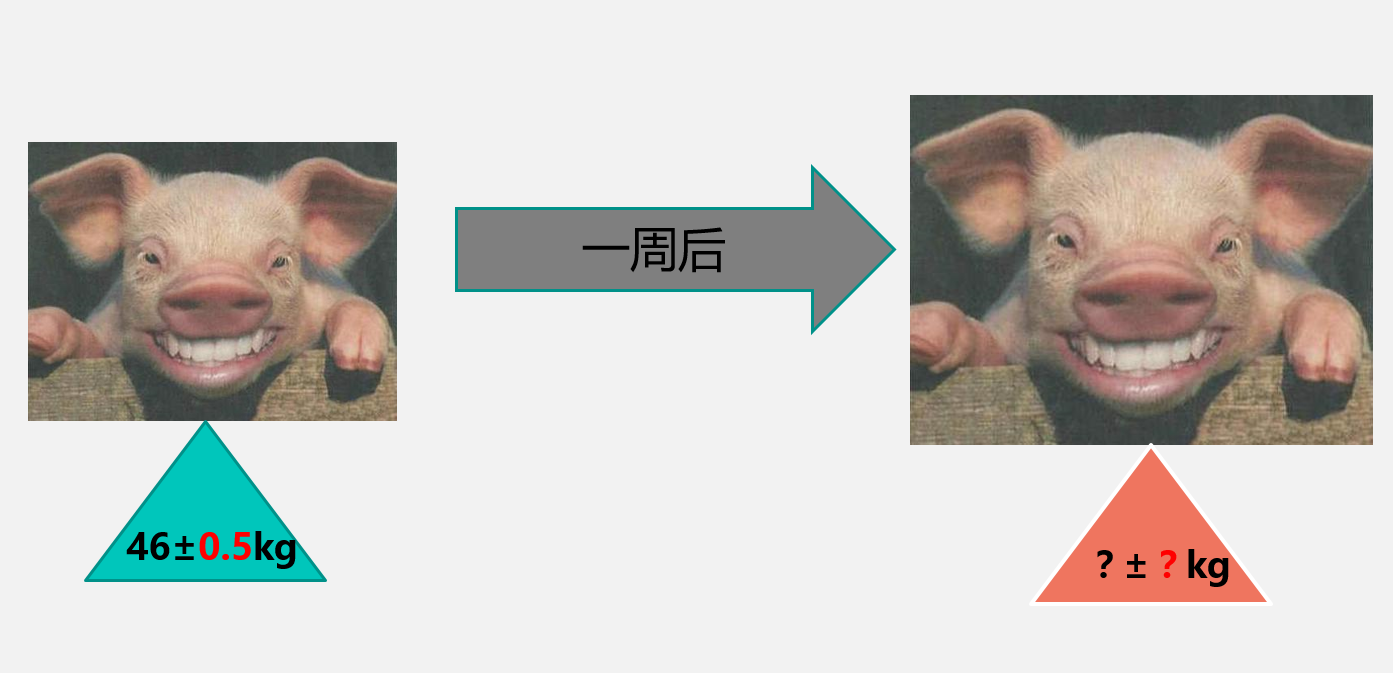
为了得到一周后的体重,我有两种方法:一是根据我多年的养猪经验得到的猪体重公式推求出一个大概的值,另一个就是直接去称它的体重。当然,两种方法都有一定的误差。假设经验公式得到的体重是48kg,误差2kg;直接称体重得到的是49kg,误差1kg:
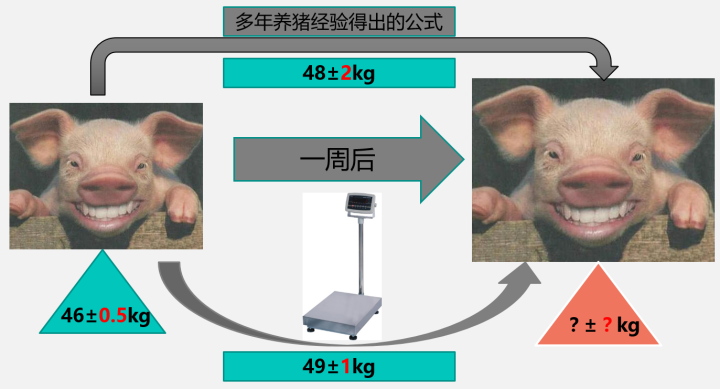
可是,我是一个处女座的人,不管是经验公式得到的值,还是直接称量得到的值,我都觉得不够准。我希望有一种方法,可以同时结合这只猪一周前的体重、用经验公式估计的值以及直接称量得到的值,综合考虑,得出一个最接近猪真实体重的,误差最小的值。这就是卡尔曼滤波要完成的任务。
现在我们来把养猪的模型抽象成数学公式:
现在我们来把养猪的模型抽象成数学公式:
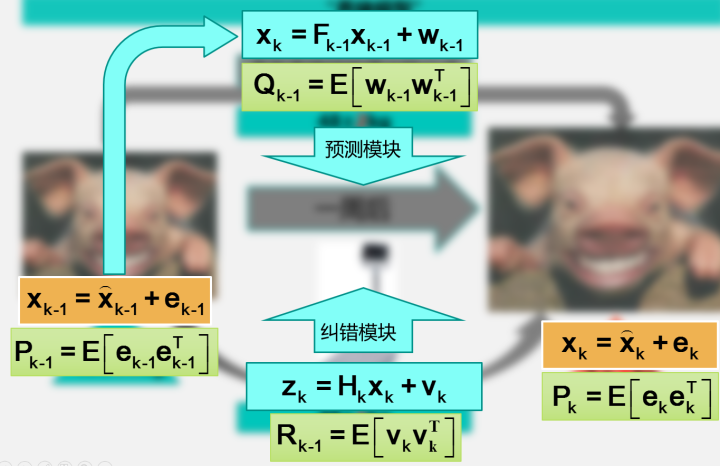
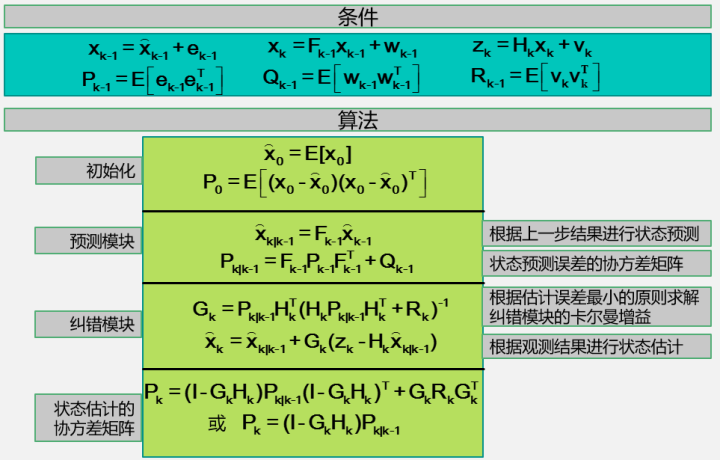
上图的左边,上一周的猪的体重,可以抽象为也k-1时刻的状态值,用k-1时刻的最优估计值加上一个误差项来表示,右边同理。其中,

这一项表示的是估计值的协方差。这里要说明两点:1,上图中所有的变量都是用粗体,表示这是一个向量或者一个矩阵;2,之所以用(列)向量而非一个数来表示状态值,是因为,虽然一只猪的体重可以用一个值来表示,但是在实际的应用中很多状态并不是一个数就能表示的(比如导弹在空间中的位置,同时有x、y、z三个坐标)。
上图中右边表示k时刻的状态值,这个值可以通过预测模块(也就是根据经验公式估计猪的体重)和纠错模块(也就是直接去称量猪的体重值)来估计。同样,预测模块和纠错模块都有着对应的误差和误差协方差矩阵。卡尔曼滤波要做的,就是根据贝叶斯估计的相关理论,同时考虑预测模块和纠错模块的协方差,对误差小的项赋予较大的权重,对误差大的项赋予较小的权重,并使预测的误差最小。
上图中右边表示k时刻的状态值,这个值可以通过预测模块(也就是根据经验公式估计猪的体重)和纠错模块(也就是直接去称量猪的体重值)来估计。同样,预测模块和纠错模块都有着对应的误差和误差协方差矩阵。卡尔曼滤波要做的,就是根据贝叶斯估计的相关理论,同时考虑预测模块和纠错模块的协方差,对误差小的项赋予较大的权重,对误差大的项赋予较小的权重,并使预测的误差最小。
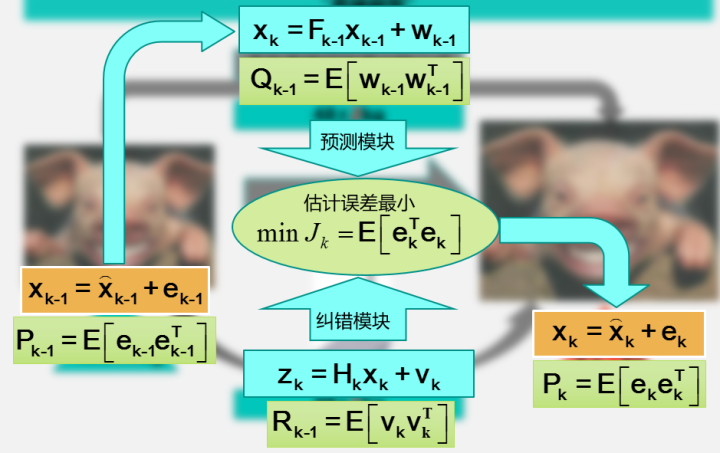
具体的实现过程如下:
至于具体的这个过程是怎么推求的,每个参数的详细解释又是怎么样的,这个在所有介绍卡尔曼的滤波的书上都有讲述,也并不是一个帖子就能说清楚的,这里就不展开讲了~
谢谢各位看官~

 浙公网安备 33010602011771号
浙公网安备 33010602011771号