路径规划中曲率问题
1、什么是曲率
百科解释:曲线的曲率(curvature)就是针对曲线上某个点的切线方向角对弧长的转动率,通过微分来定义,表明曲线偏离直线的程度。数学上表明曲线在某一点的弯曲程度的数值。
曲率越大表示曲线的弯曲程度越大。曲率的倒数就是曲率半径。
2、曲率计算方式
2.1 连续曲线下的曲率计算
2.1.1 直角坐标方程下计算曲率





2.1.2 参数方程下计算曲率


2.2 离散点下曲率计算(路径规划中常用)
三点确定曲率
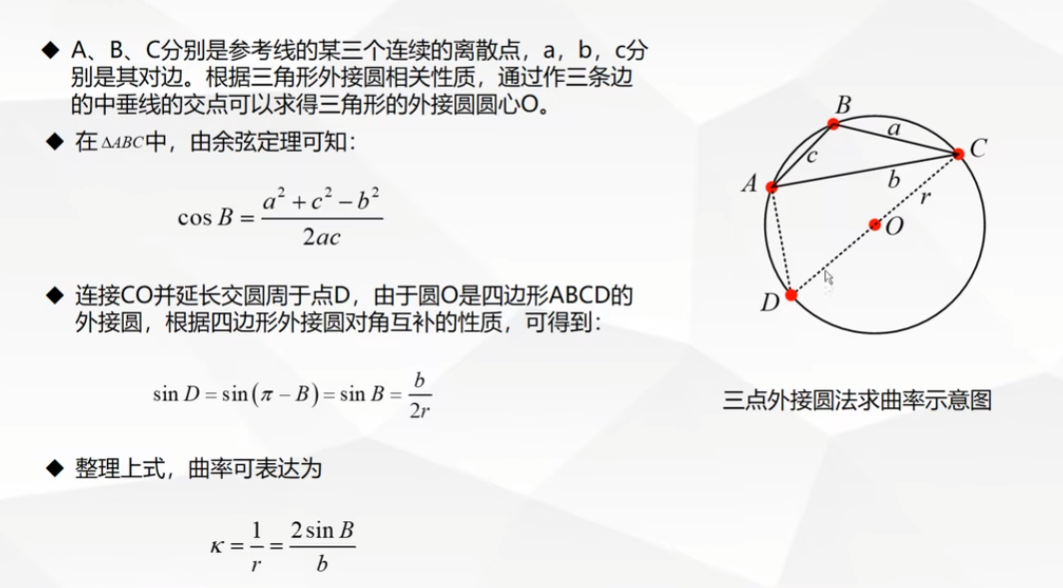
// An highlighted block try { //取点 P1、P2、P3是位置信息 A = PT1.pose.position; B = PT2.pose.position; C = PT3.pose.position; double curvity; //计算曲率部分,使用正弦定理 a/sinA = 2R if(A.x == B.x == C.x)//三点横坐标相同,即共线,直接标记曲率为0 { curvity = 0; } else { double a,b,c; r; double cosA,sinA,dis; c = sqrt((A.x - B.x)*(A.x - B.x) + (A.y - B.y)*(A.y - B.y)); b = sqrt((A.x - C.x)*(A.x - C.x) + (A.y - C.y)*(A.y - C.y)); a = sqrt((B.x - C.x)*(B.x - C.x) + (B.y - C.y)*(B.y - C.y)); dis = a*a + c*c - b*b; cosB = dis/(2*dis1*dis3);//余弦定理求角度 sinB = sqrt(1 - cosA*cosA);//求正弦 r = 0.5*b/sinB;//正弦定理求外接圆半径 curvity = 1/r;//半径的倒数是曲率,半径越小曲率越大 } cout<<"curvity = "<<curvity<<"\n"; } catch(tf::TransformException &ex)//处理意外情况 { ROS_ERROR("%s",ex.what()); cout<<"三点取点失败\n"; }
离散点计算曲率(介绍了采用多个点,使用最小二乘法进行曲率运算)
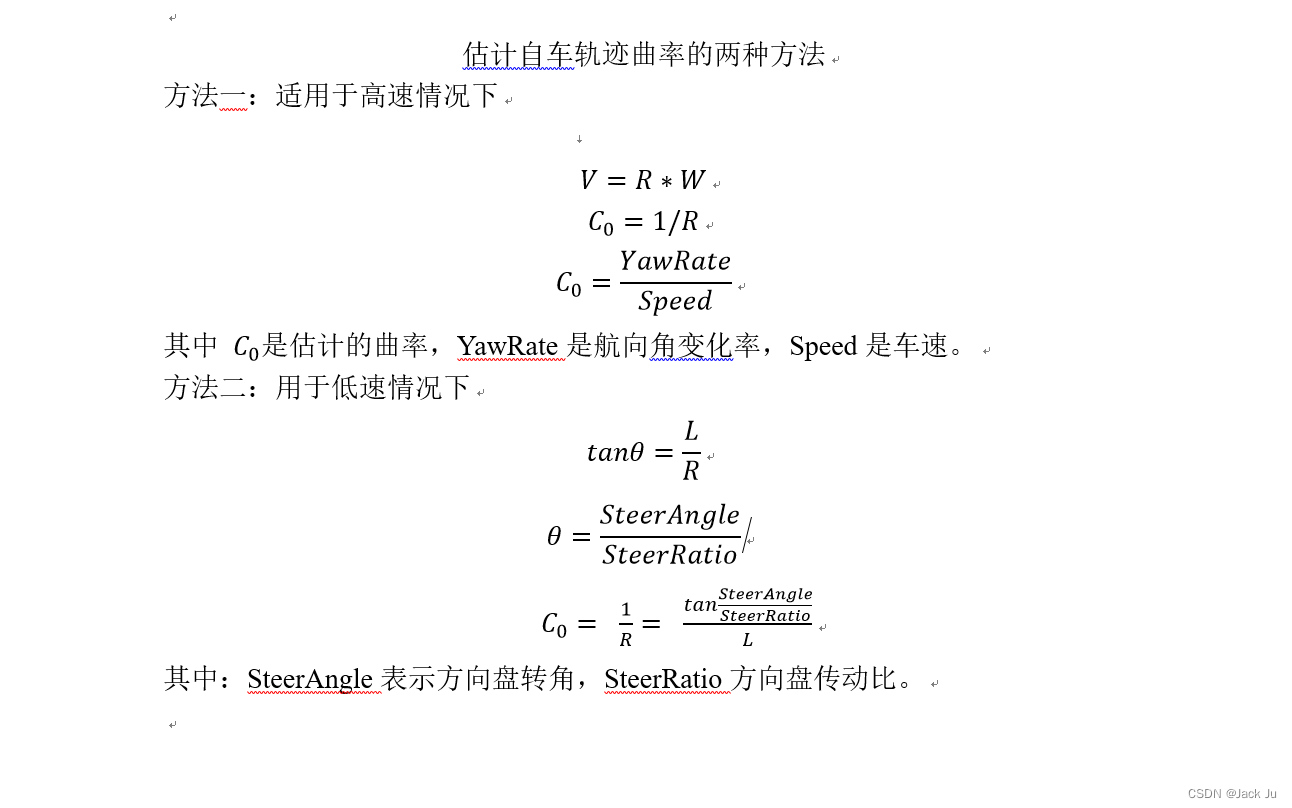
2.3 车辆运动过程中曲率计算
3、曲率在路径规划中的一些问题
3.1曲率不连续点是什么:
是即使两个相邻段之间是平滑连接的,但是两个段具有不同或不同方向的曲率。大多数这样的光滑连接,其实际上是间断点(曲率不连续点)。在该类型的不连续点上,所有相关坐标轴都表现出加速度的不连续性。
参考文章:
3.2 避免猛打方向盘
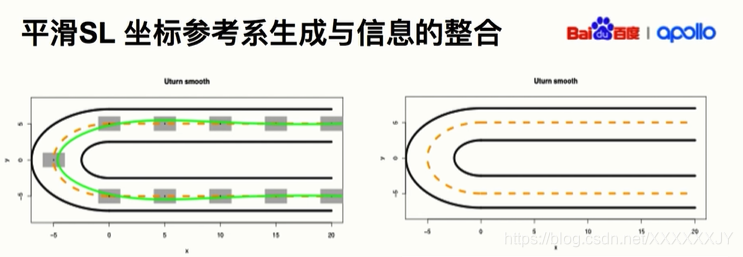
若生成右图所示的路径,那么乘坐感会较差,因为在直线与转弯的交界处需要猛打方向盘。所以先根据道路中心线获得左图的若干小黑点,然后生成灰色的框,希望规划的路径尽可能平稳地穿过这个灰色的框,并且满足曲率2阶可导(这样就避免猛打方向盘了)。
如何通俗地理解曲率?
估计自车轨迹曲率的方法
ACS运动控制:轨迹拐点、曲率不连续点
三点法求曲率,使用C++实现
我们向往远方,却忽略了此刻的美丽

 浙公网安备 33010602011771号
浙公网安备 33010602011771号