四元数
本文总字数:733,阅读预计需要:2分钟
Quaternion 的定义
四元数一般定义如下:
q=w+xi+yj+zk
其中 w,x,y,z是实数。同时,有:
i*i=-1
j*j=-1
k*k=-1
四元数也可以表示为:
q=[w,v]
其中v=(x,y,z)是矢量,w是标量,虽然v是矢量,但不能简单的理解为3D空间的矢量,它是4维空间中的的矢量,也是非常不容易想像的。
通俗的讲,一个四元数(Quaternion)描述了一个旋转轴和一个旋转角度。这个旋转轴和这个角度可以通过 Quaternion::ToAngleAxis转换得到。当然也可以随意指定一个角度一个旋转轴来构造一个Quaternion。这个角度是相对于单位四元数而言的,也可以说是相对于物体的初始方向而言的。
当用一个四元数乘以一个向量时,实际上就是让该向量围绕着这个四元数所描述的旋转轴,转动这个四元数所描述的角度而得到的向量。
四元数的优点
有多种方式可表示旋转,如 axis/angle、欧拉角(Euler angles)、矩阵(matrix)、四元组等。 相对于其它方法,四元组有其本身的优点:
四元数不会有欧拉角存在的 gimbal lock 问题
四元数由4个数组成,旋转矩阵需要9个数
两个四元数之间更容易插值
四元数、矩阵在多次运算后会积攒误差,需要分别对其做规范化(normalize)和正交化(orthogonalize),对四元数规范化更容易
与旋转矩阵类似,两个四元组相乘可表示两次旋转
四元数下的坐标系转换
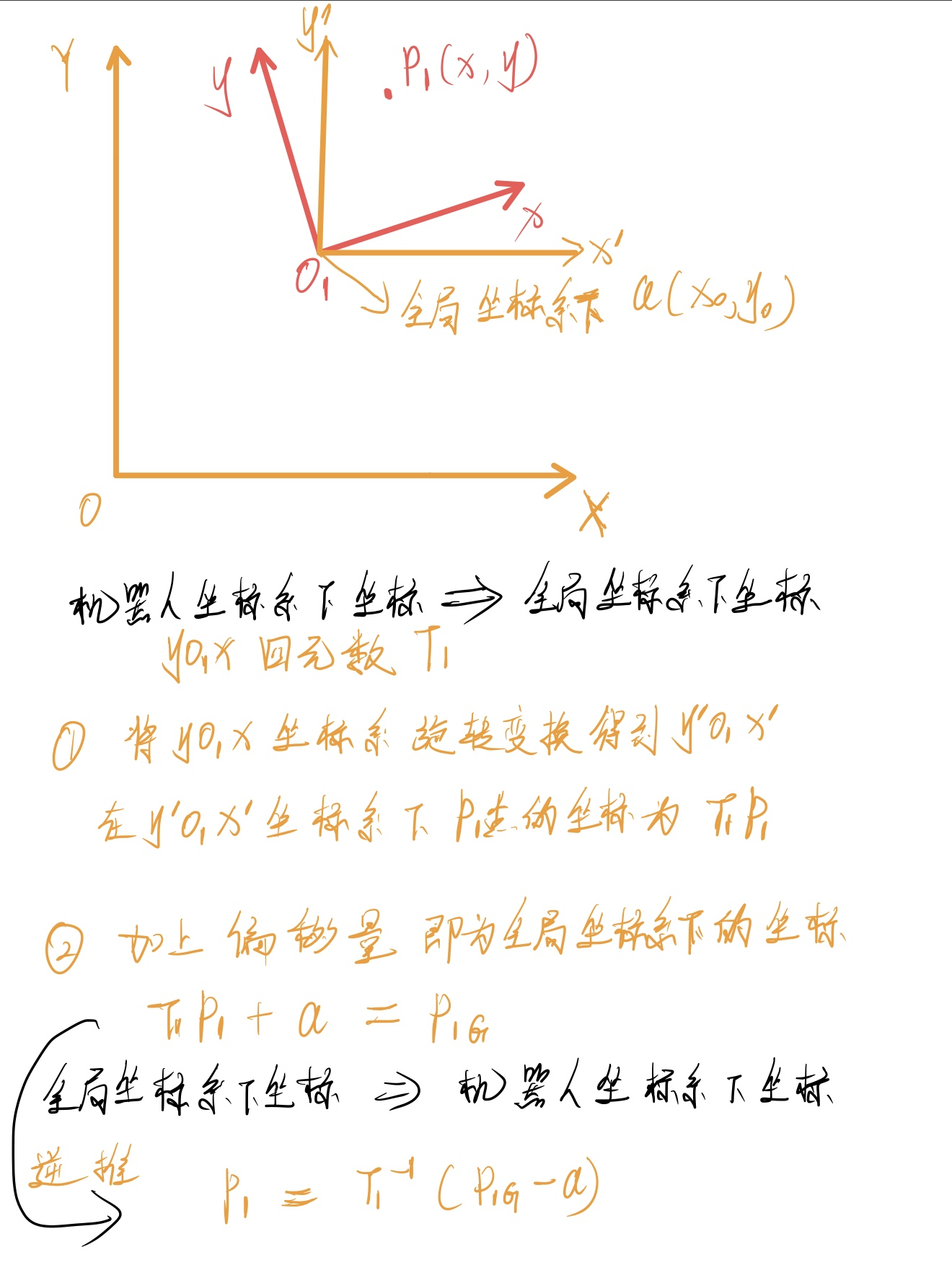
机器人坐标系下的点的坐标,转换到全局坐标系下的坐标
例如:坐标系YO1X下P1(x,y),坐标系YO1X在全局坐标系下的位姿(四元数)T1,O1点在全局坐标系下的坐标a(X0,Y0)。
我们向往远方,却忽略了此刻的美丽


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 25岁的心里话
· 闲置电脑爆改个人服务器(超详细) #公网映射 #Vmware虚拟网络编辑器
· 零经验选手,Compose 一天开发一款小游戏!
· 通过 API 将Deepseek响应流式内容输出到前端
· AI Agent开发,如何调用三方的API Function,是通过提示词来发起调用的吗