横纵向控制耦合问题
本文总字数:365,阅读预计需要:1分钟
Reference:智能车辆运动控制研究综述
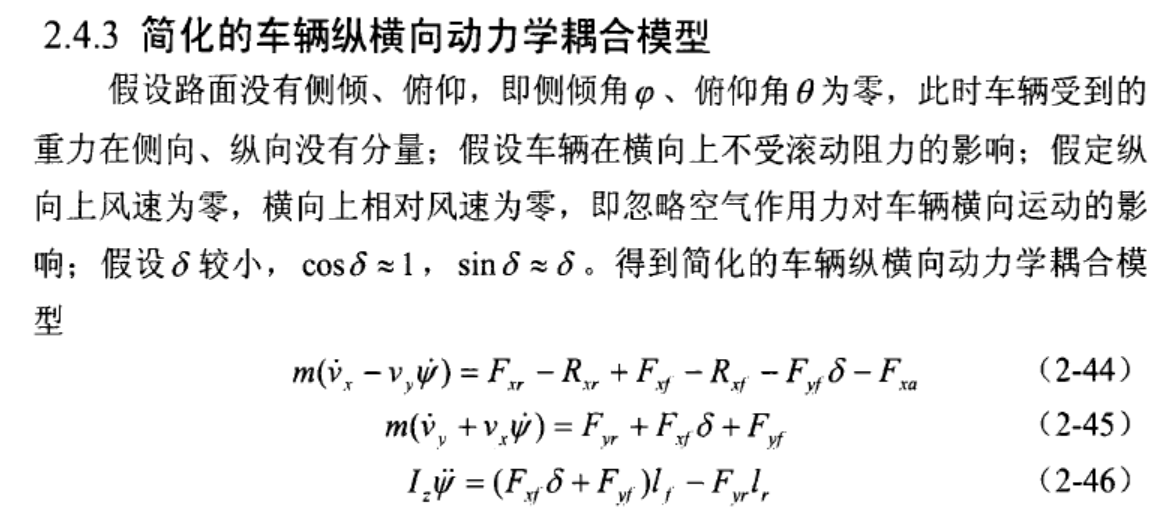
对于无人驾驶运动控制而言,车辆的纵向运动与侧向运动间的耦合效应[78-79]包括三类:
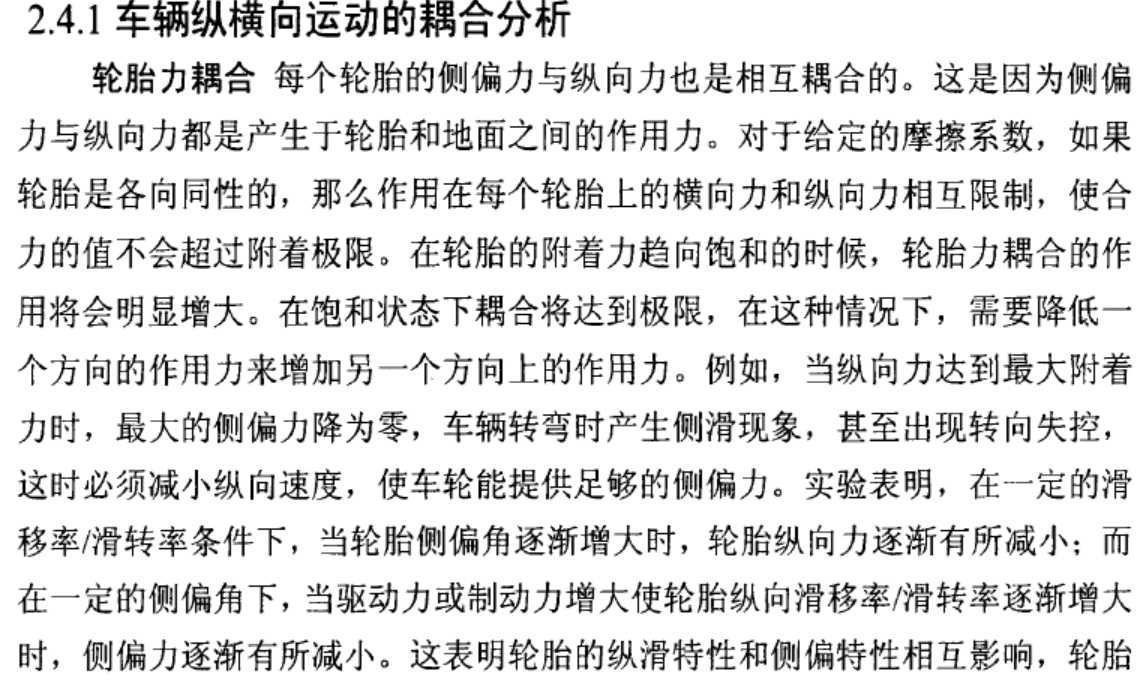
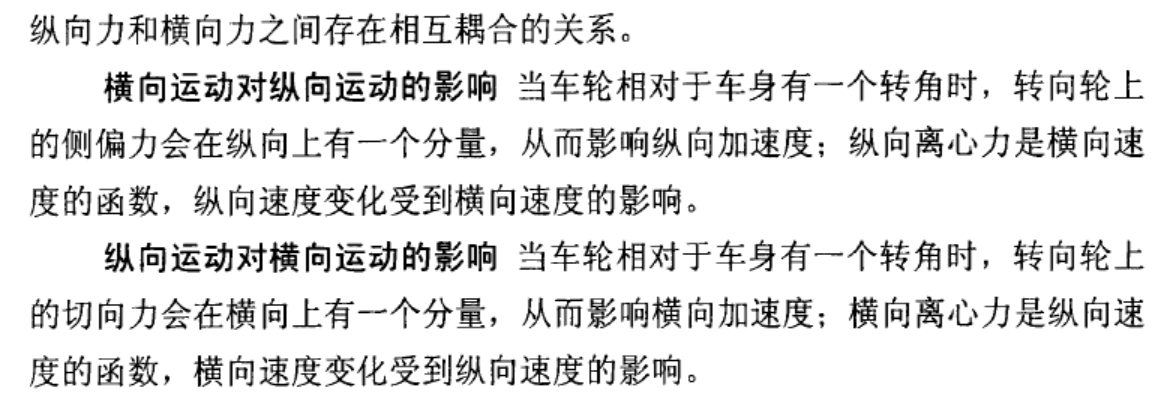
- 运动学耦合指的是由于车轮转向角的存在,转向轮侧偏力在纵向的分量会影响纵向运动,同时侧向运动也受纵向速度影响;
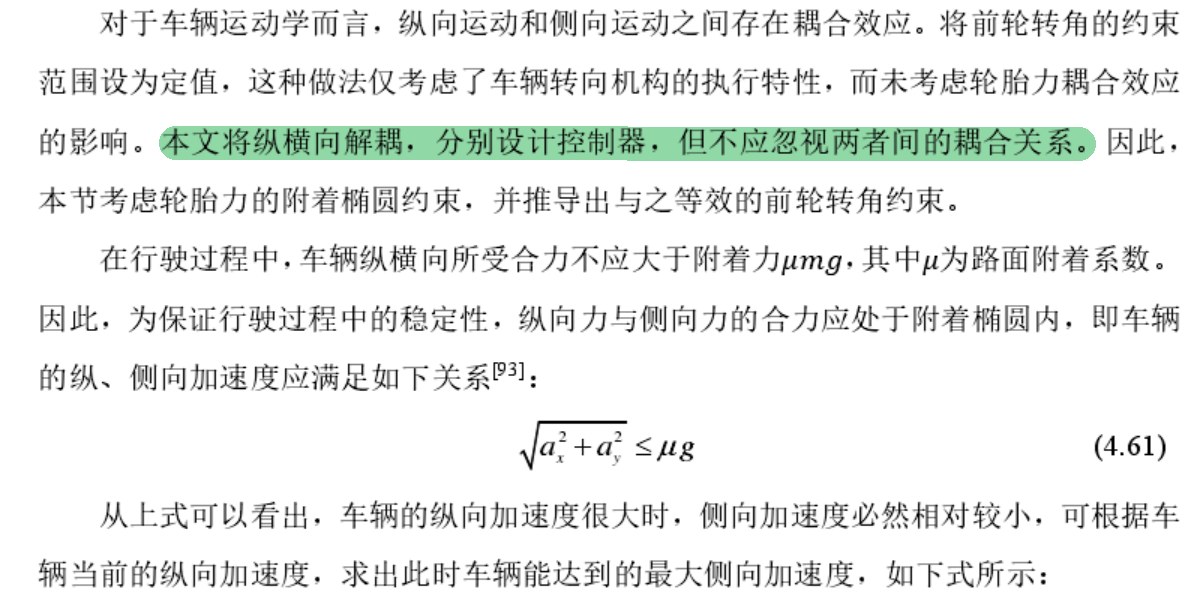
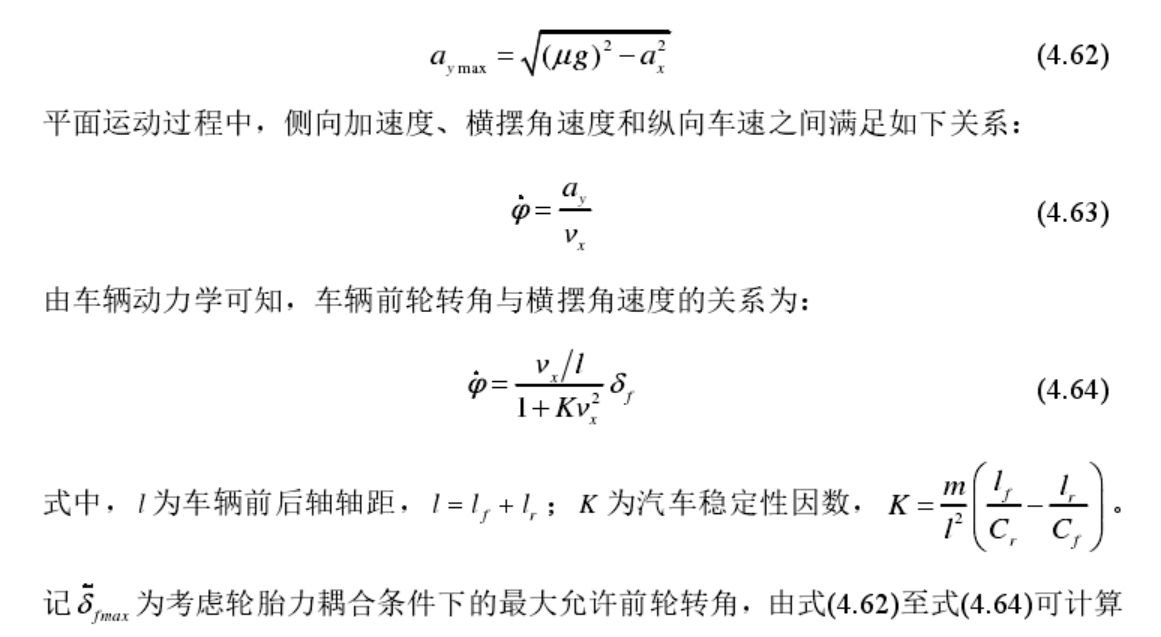
- 轮胎力耦合是指轮胎侧向力和纵向力之间相互作用,两者合力受到摩擦椭圆约束;
- 载荷转移效应是指纵向加速度引起的前后轴载荷转移或侧向加速度引起的左右轮载荷转移带来的轮胎垂直载荷重新分配,进而对纵侧向动力学产生影响。
Reference:无人驾驶车辆的运动控制发展现状综述
Reference:非结构化场景下自动驾驶汽车轨迹规划与运动控制算法研究
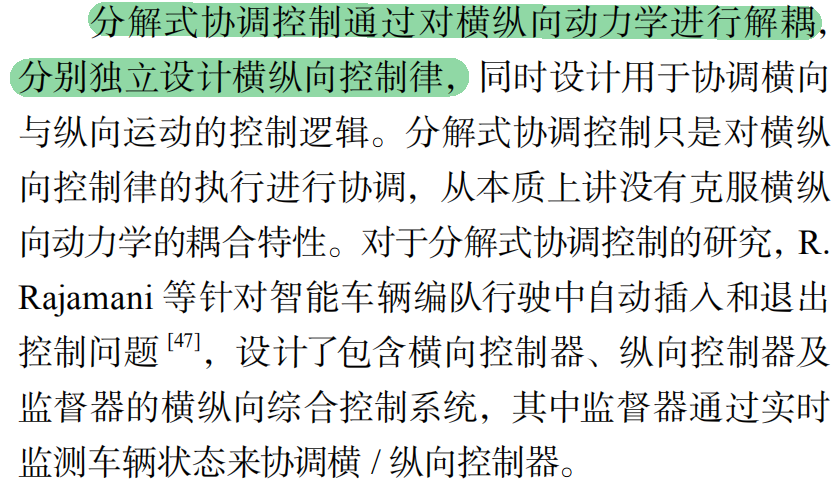
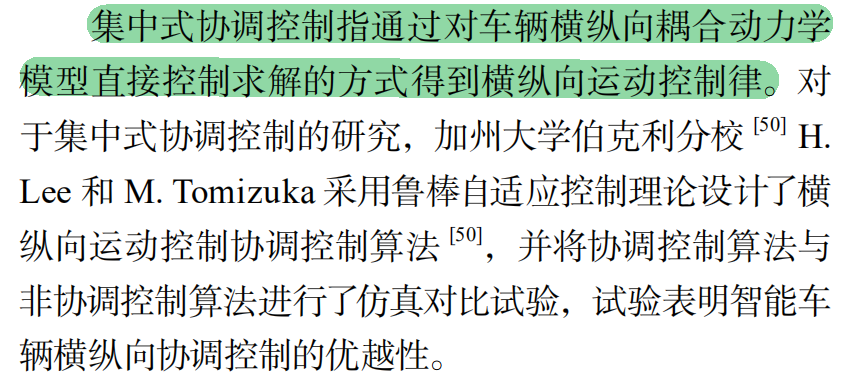
Reference:自动化公路系统车辆纵横向控制
Reference:基于滑模控制的车辆纵横向耦合控制
我们向往远方,却忽略了此刻的美丽


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律