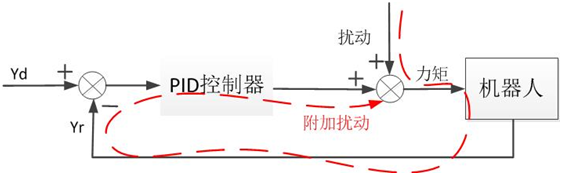
外界扰动经过反馈回路后,会产生一个附加扰动,试想如果附加扰动能抵消外界扰动,那扰动不就消除了嘛,这也是PID反馈控制能压制外界扰动的原理。
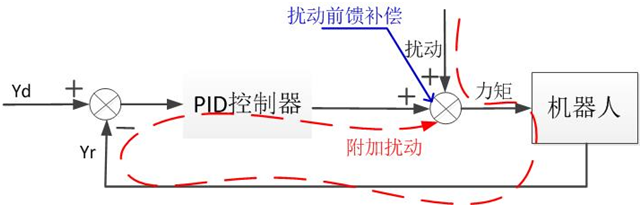
反馈控制器有个重要的衡量指标:抗干扰能力。但若外界干扰过大,PID就不能全部压下来,这个时候就得依靠前馈补偿。
如果外界扰动是10,我们前馈补偿可以消灭掉9,那剩余的1可由PID反馈轻松消灭掉。于是乎,我们需要构建一个由PID反馈控制+基于系统建模的前馈控制的控制器。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号