路径规划相关论文讲解
本文总字数:1268,阅读预计需要:3分钟
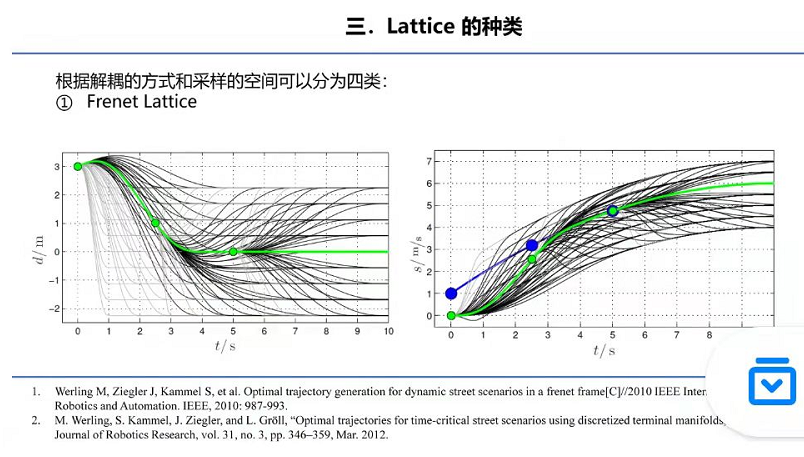
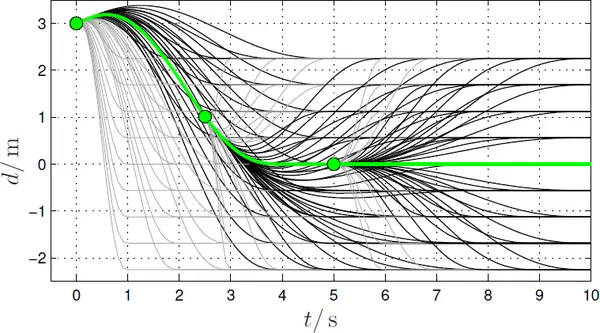 Optimal trajectories for time-critical street scenarios using discretized terminal manifolds
Optimal trajectories for time-critical street scenarios using discretized terminal manifolds
Reactive Nonholonomic Trajectory Generation via Parametric Optimal Control
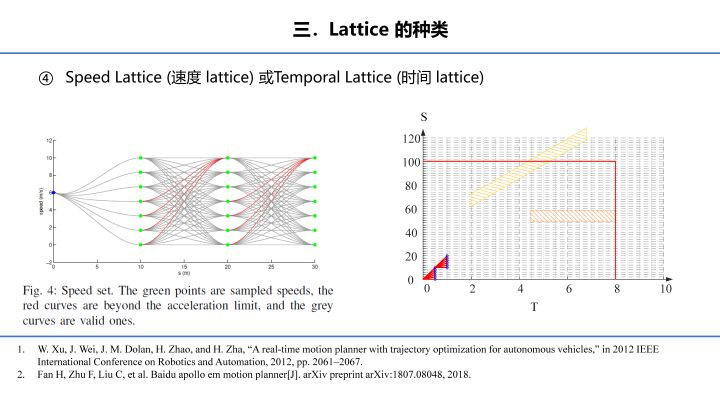
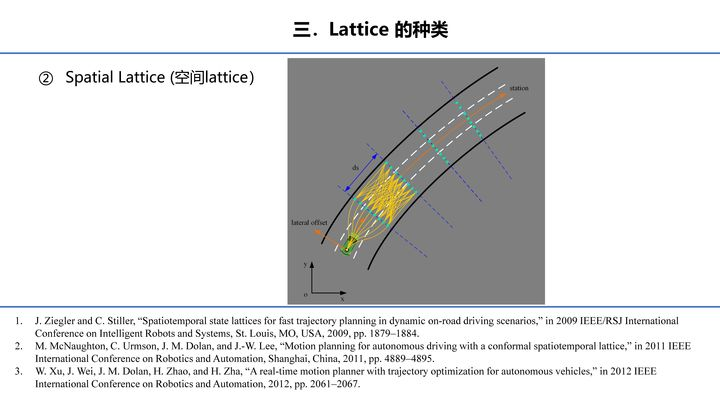
A real_time motion planner with trajectory optimization for autonomous vehicles
https://blog.csdn.net/IHTY_NUI/article/details/118458682
Baidu Apollo EM Motion Planner
Spatiotemporal state lattices for fast trajectory planning in dynamic on-road driving scenarios
Motion planning for autonomous driving with a conformal spatiotemporal lattice,
Spatiotemporal state lattices for fast trajectory planning in dynamic on-road driving scenarios
Motion planning for autonomous driving with a conformal spatiotemporal lattice,
A real_time motion planner with trajectory optimization for autonomous vehicles
Optimal trajectory generation for dynamic street scenarios in a Frenét Frame
这一篇经典,一个三维规划问题变成两个二维采样问题。
我们向往远方,却忽略了此刻的美丽


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· AI与.NET技术实操系列:基于图像分类模型对图像进行分类
· go语言实现终端里的倒计时
· 如何编写易于单元测试的代码
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 25岁的心里话
· 闲置电脑爆改个人服务器(超详细) #公网映射 #Vmware虚拟网络编辑器
· 零经验选手,Compose 一天开发一款小游戏!
· 通过 API 将Deepseek响应流式内容输出到前端
· AI Agent开发,如何调用三方的API Function,是通过提示词来发起调用的吗
2020-09-08 C语言杂谈