4.3 ROS工作空间覆盖
4.3 ROS工作空间覆盖
所谓工作空间覆盖,是指不同工作空间中,存在重名的功能包的情形。
ROS 开发中,会自定义工作空间且自定义工作空间可以同时存在多个,可能会出现一种情况: 虽然特定工作空间内的功能包不能重名,但是自定义工作空间的功能包与内置的功能包可以重名或者不同的自定义的工作空间中也可以出现重名的功能包,那么调用该名称功能包时,会调用哪一个呢?比如:自定义工作空间A存在功能包 turtlesim,自定义工作空间B也存在功能包 turtlesim,当然系统内置空间也存在turtlesim,如果调用turtlesim包,会调用哪个工作空间中的呢?
实现
0.新建工作空间A与工作空间B,两个工作空间中都创建功能包: turtlesim。
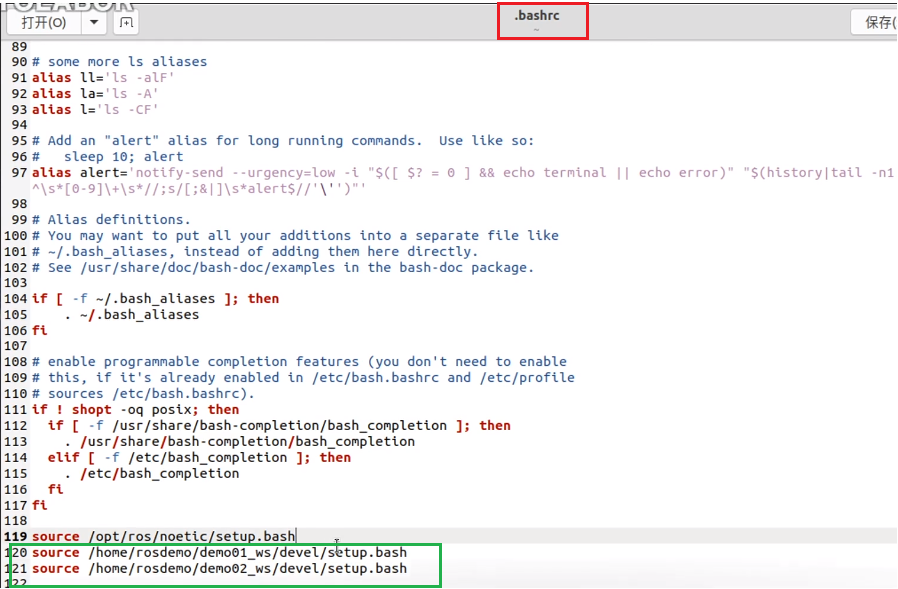
1.在 ~/.bashrc 文件下追加当前工作空间的 bash 格式如下:
source /home/用户/路径/工作空间A/devel/setup.bash
source /home/用户/路径/工作空间B/devel/setup.bas
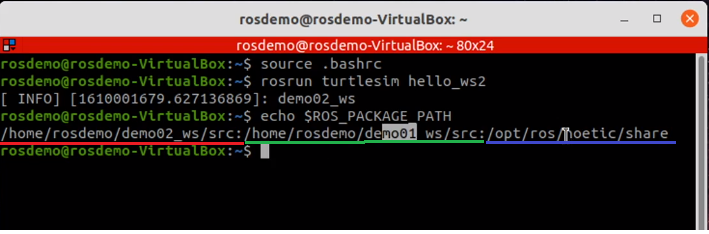
2.新开命令行:source .bashrc加载环境变量
3.查看ROS环境环境变量echo $ROS_PACKAGE_PATH
结果:自定义工作空间B:自定义空间A:系统内置空间
4.调用命令:roscd turtlesim会进入自定义工作空间B
原因
ROS 会解析 .bashrc 文件,并生成 ROS_PACKAGE_PATH ROS包路径,该变量中按照 .bashrc 中配置设置工作空间优先级,在设置时需要遵循一定的原则:ROS_PACKAGE_PATH 中的值,和 .bashrc 的配置顺序相反--->后配置的优先级更高,如果更改自定义空间A与自定义空间B的source顺序,那么调用时,将进入工作空间A。
结论
功能包重名时,会按照 ROS_PACKAGE_PATH 查找,配置在前的会优先执行。
隐患
存在安全隐患,比如当前工作空间B优先级更高,意味着当程序调用 turtlesim 时,不会调用工作空间A也不会调用系统内置的 turtlesim,如果工作空间A在实现时有其他功能包依赖于自身的 turtlesim,而按照ROS工作空间覆盖的涉及原则,那么实际执行时将会调用工作空间B的turtlesim,从而导致执行异常,出现安全隐患。
BUG 说明:
当在 .bashrc 文件中 source 多个工作空间后,可能出现的情况,在 ROS PACKAGE PATH 中只包含两个工作空间,可以删除自定义工作空间的 build 与 devel 目录,重新 catkin_make,然后重新载入 .bashrc 文件,问题解决。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· AI与.NET技术实操系列:基于图像分类模型对图像进行分类
· go语言实现终端里的倒计时
· 如何编写易于单元测试的代码
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 25岁的心里话
· 闲置电脑爆改个人服务器(超详细) #公网映射 #Vmware虚拟网络编辑器
· 零经验选手,Compose 一天开发一款小游戏!
· 通过 API 将Deepseek响应流式内容输出到前端
· AI Agent开发,如何调用三方的API Function,是通过提示词来发起调用的吗