4.1 ROS元功能包
4.1 ROS元功能包
场景:完成ROS中一个系统性的功能,可能涉及到多个功能包,比如实现了机器人导航模块,该模块下有地图、定位、路径规划...等不同的子级功能包。那么调用者安装该模块时,需要逐一的安装每一个功能包吗?
显而易见的,逐一安装功能包的效率低下,在ROS中,提供了一种方式可以将不同的功能包打包成一个功能包,当安装某个功能模块时,直接调用打包后的功能包即可,该包又称之为元功能包(metapackage)。
概念
MetaPackage是Linux的一个文件管理系统的概念。是ROS中的一个虚包,里面没有实质性的内容,但是它依赖了其他的软件包,通过这种方法可以把其他包组合起来,我们可以认为它是一本书的目录索引,告诉我们这个包集合中有哪些子包,并且该去哪里下载。
例如:
- sudo apt install ros-noetic-desktop-full 命令安装ros时就使用了元功能包,该元功能包依赖于ROS中的其他一些功能包,安装该包时会一并安装依赖。
还有一些常见的MetaPackage:navigation moveit! turtlebot3 ....
作用
方便用户的安装,我们只需要这一个包就可以把其他相关的软件包组织到一起安装了。
实现
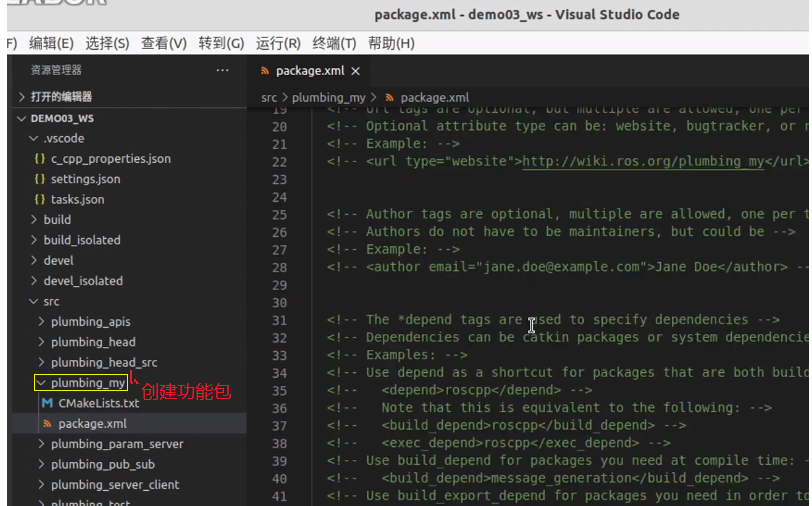
首先:新建一个功能包
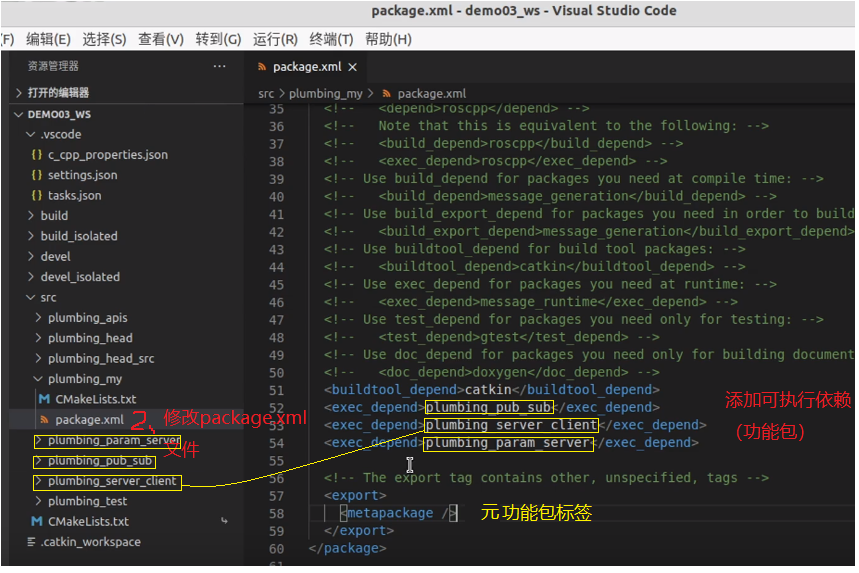
然后:修改package.xml ,内容如下:
<exec_depend>被集成的功能包</exec_depend>
.....
<export>
<metapackage />
</export>
最后:修改 CMakeLists.txt,内容如下:
cmake_minimum_required(VERSION 3.0.2)
project(demo)
find_package(catkin REQUIRED)
catkin_metapackage()
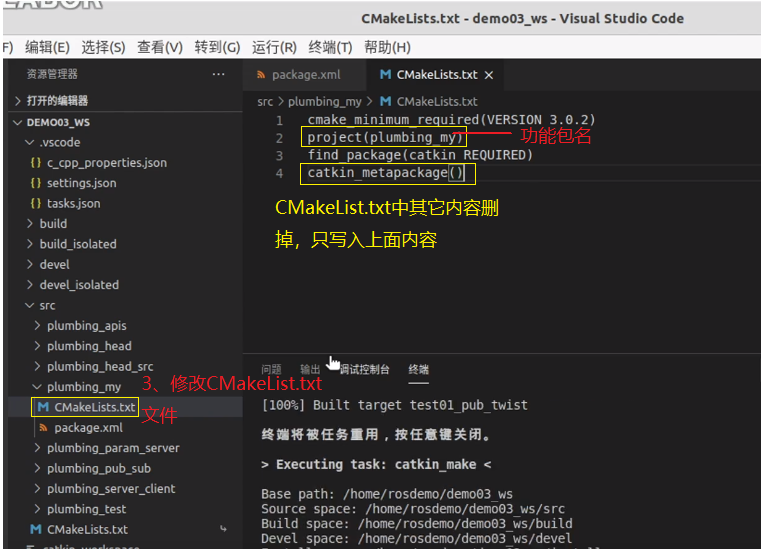
PS:CMakeLists.txt 中不可以有换行。
另请参考:
我们向往远方,却忽略了此刻的美丽

 浙公网安备 33010602011771号
浙公网安备 33010602011771号