第 4 章 ROS运行管理
第 4 章 ROS运行管理
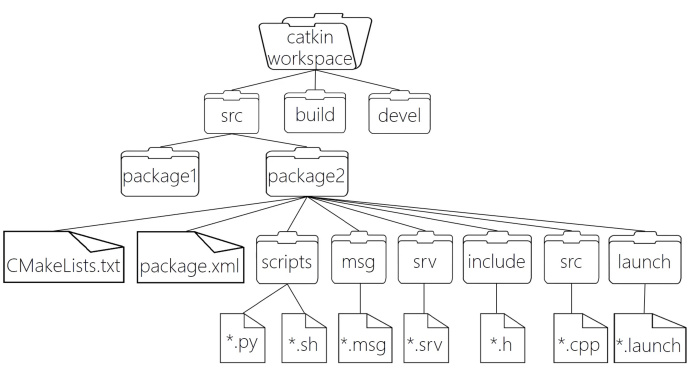
ROS是多进程(节点)的分布式框架,一个完整的ROS系统实现:
可能包含多台主机;
每台主机上又有多个工作空间(workspace);
每个的工作空间中又包含多个功能包(package);
每个功能包又包含多个节点(Node),不同的节点都有自己的节点名称;
每个节点可能还会设置一个或多个话题(topic)...
在多级层深的ROS系统中,其实现与维护可能会出现一些问题,比如,如何关联不同的功能包,繁多的ROS节点应该如何启动?功能包、节点、话题、参数重名时应该如何处理?不同主机上的节点如何通信?
本章主要内容介绍在ROS中上述问题的解决策略(见本章目录),预期达成学习目标也与上述问题对应:
-
掌握元功能包使用语法;
-
掌握launch文件的使用语法;
-
理解什么是ROS工作空间覆盖,以及存在什么安全隐患;
-
掌握节点名称重名时的处理方式;
-
掌握话题名称重名时的处理方式;
-
掌握参数名称重名时的处理方式;
-
能够实现ROS分布式通信。
我们向往远方,却忽略了此刻的美丽

 浙公网安备 33010602011771号
浙公网安备 33010602011771号