无人驾驶—高精地图和V2X
高精地图将厘米级的静态信息传传递给无人车
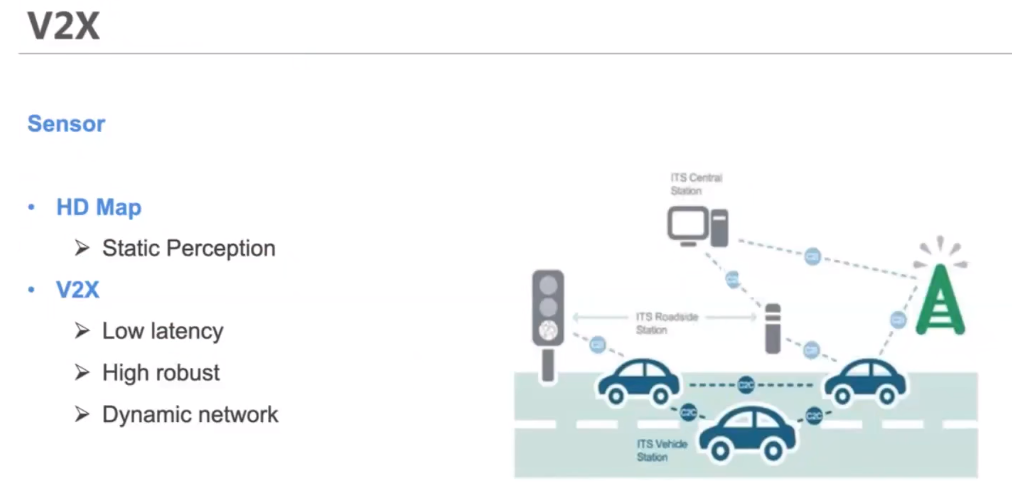
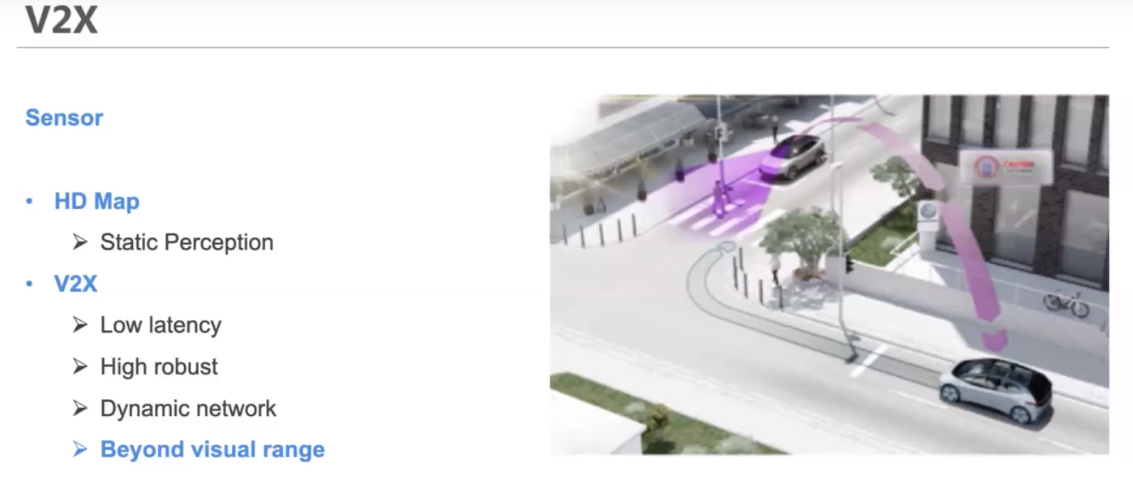
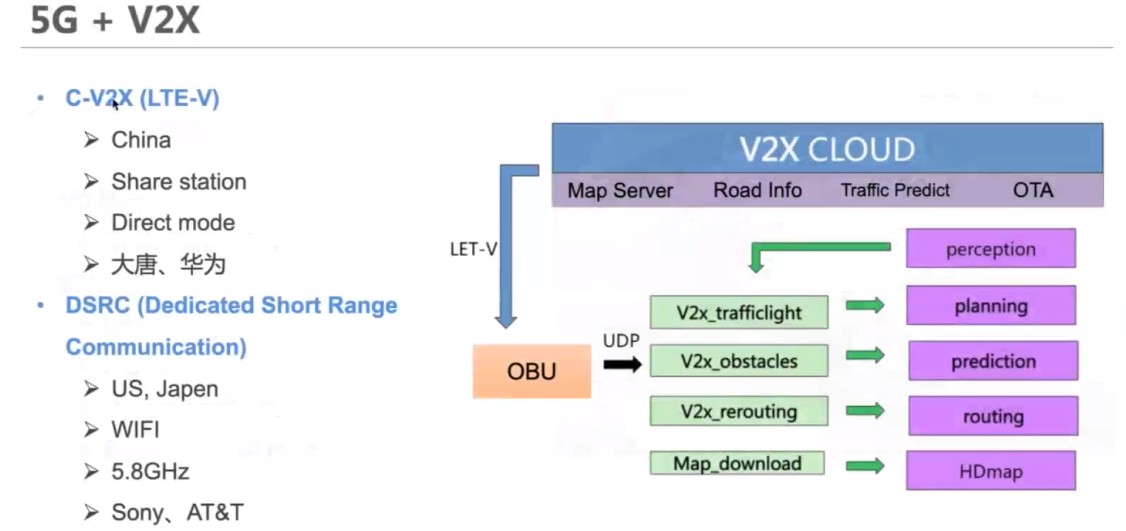
V2X将路况上的动态信息传递给无人车
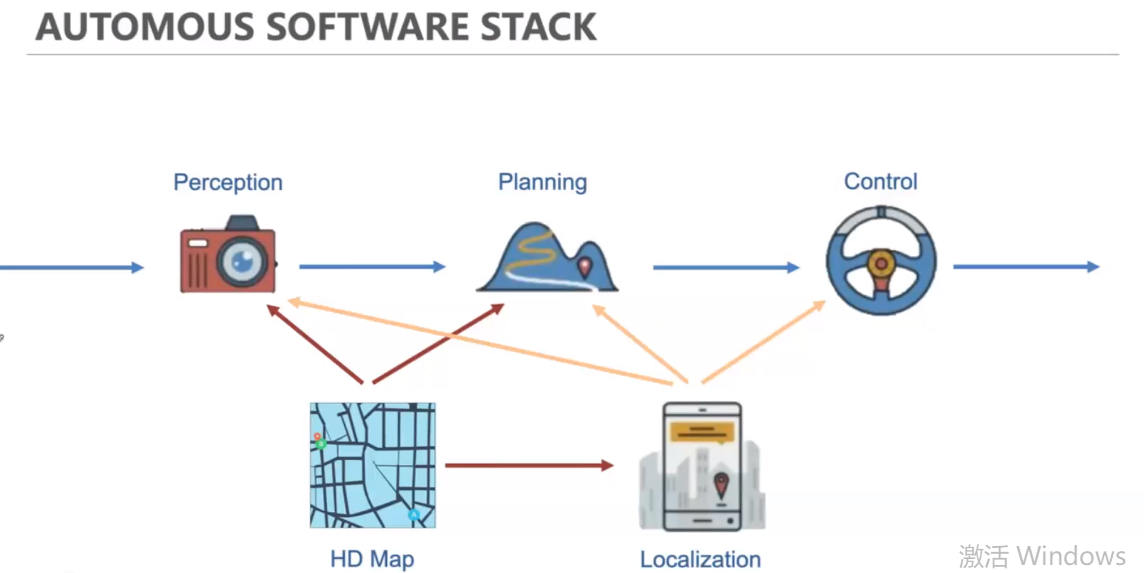
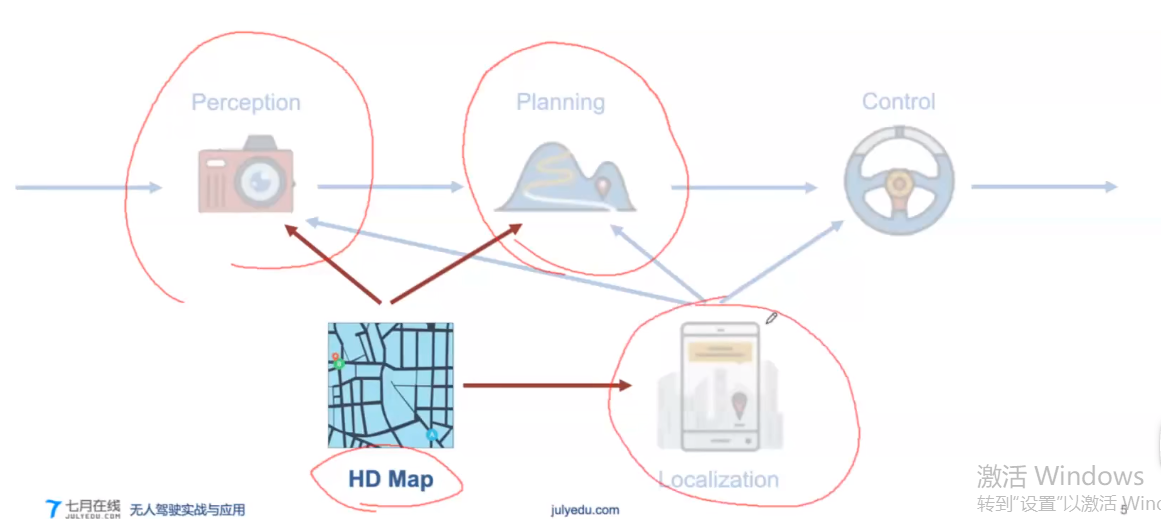
高精地图的作用
高精地图与传统地图的对比
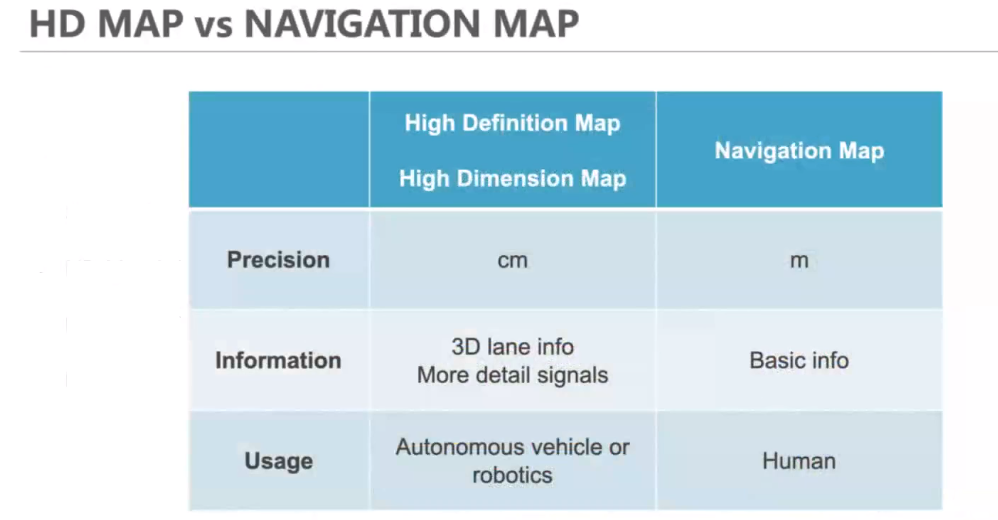
高精地图与定位的关系
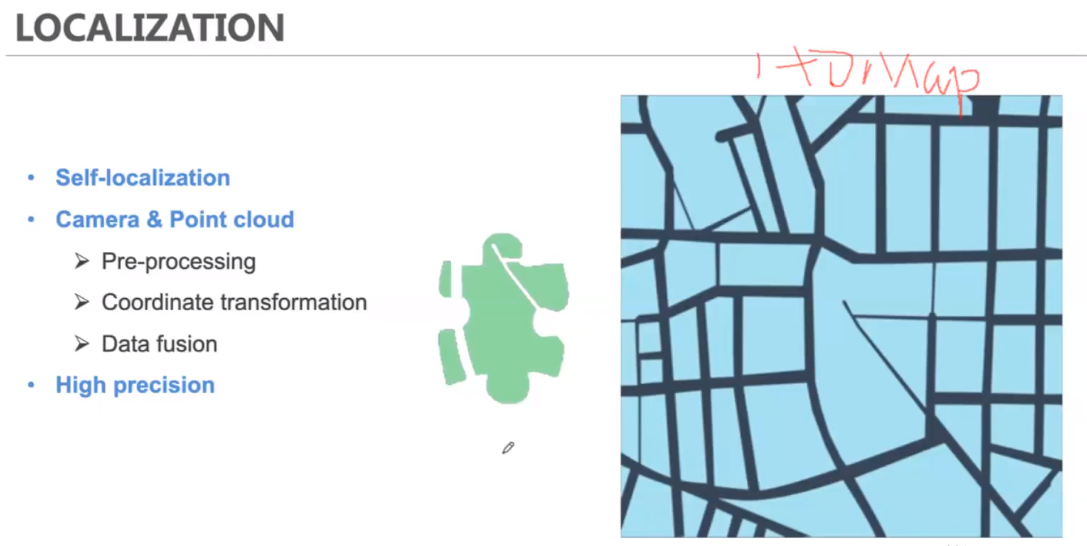
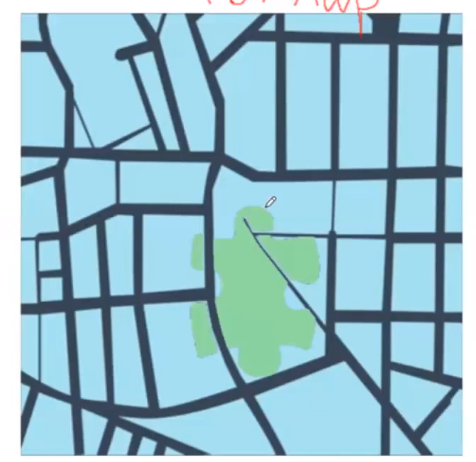
上图左侧是感知到的区域,右侧是高精地图,之后进行拼接获得车辆自身位置
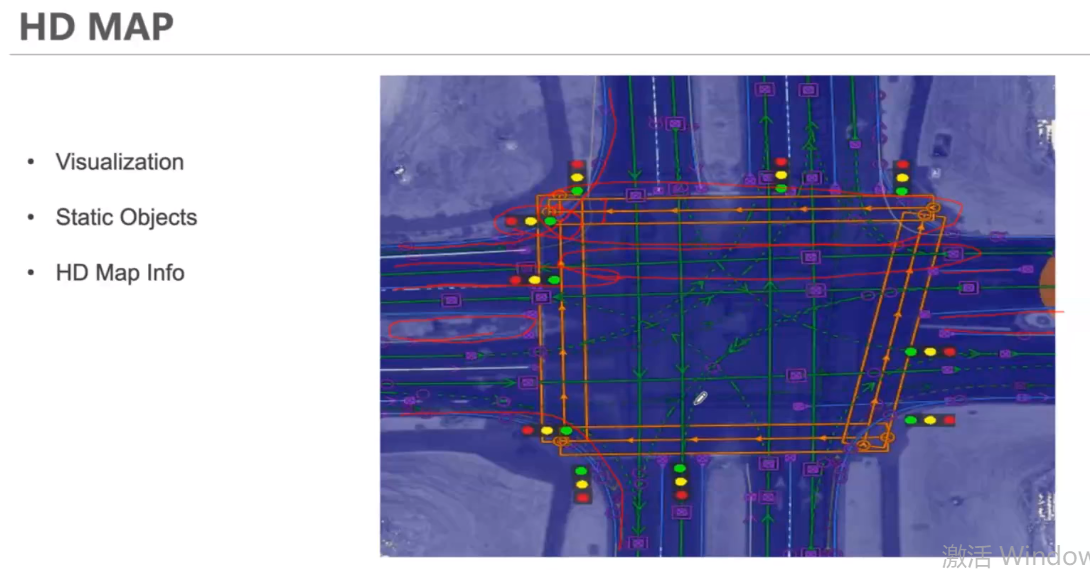
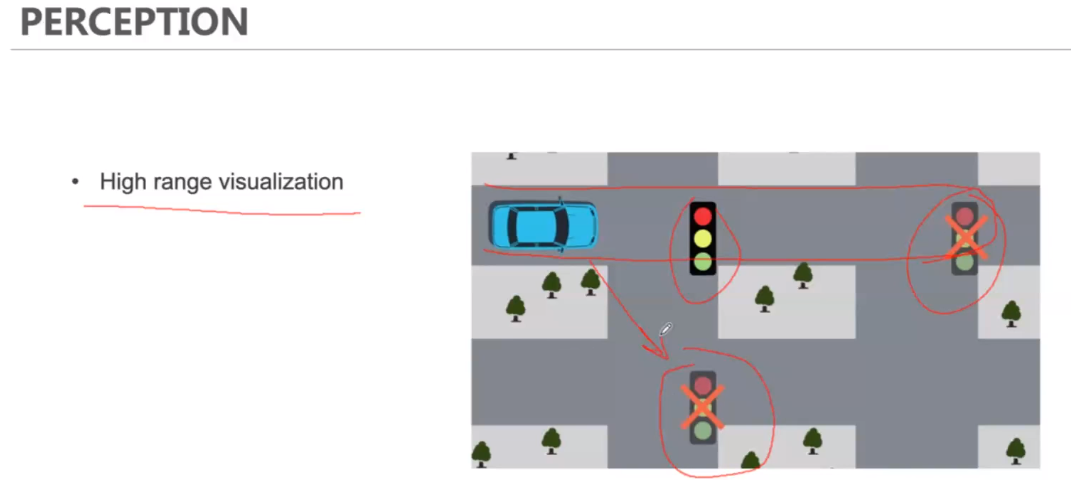
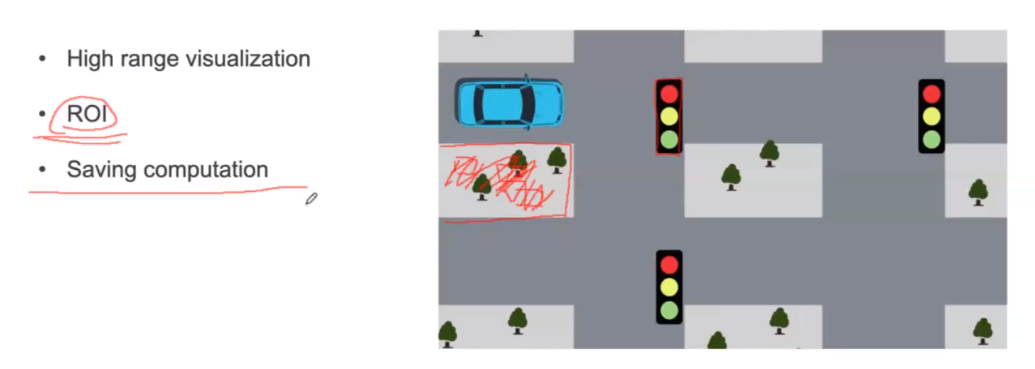
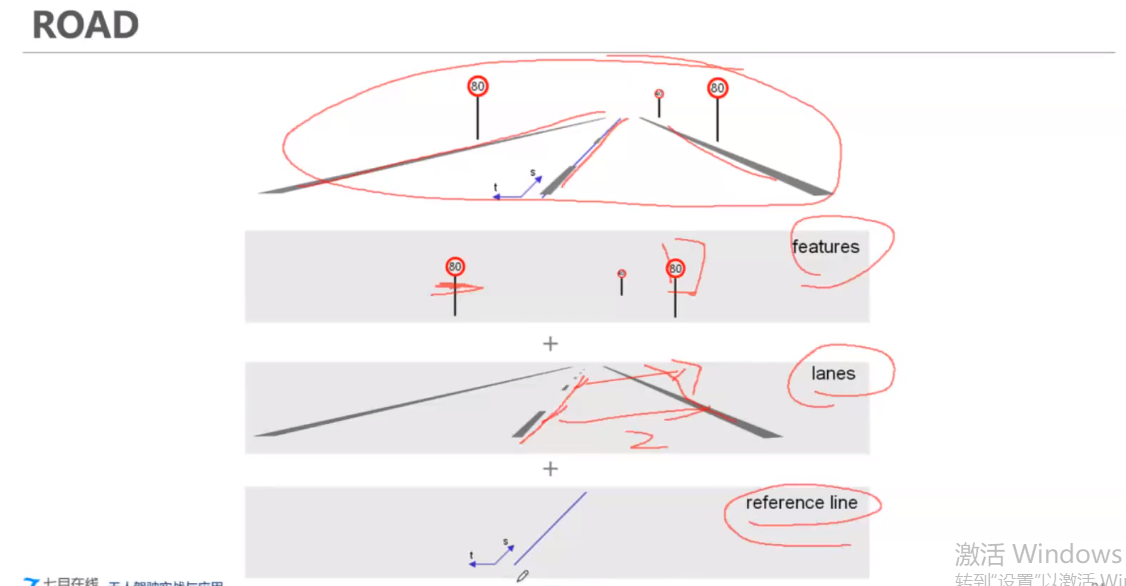
高精地图与感知的关系
感知层由于摄像头、激光雷达等传感器能够感知的范围相对人眼较小且受到天气的影响较大
而高精地图能够将道路静态信息已厘米级的精度表达,与感知层结合能够加大对道路信息获取范围,从而做出准确的决策规划
如同下图,感知层智能获取到第一个红绿灯,直线方向上的第二个红绿灯因为传感器的限制不能获取到,由于车辆被遮挡下侧红绿灯也检测不到,
但是通过高精地图就可以获取到这些红绿灯的准确信息。
高精地图与规划的关系 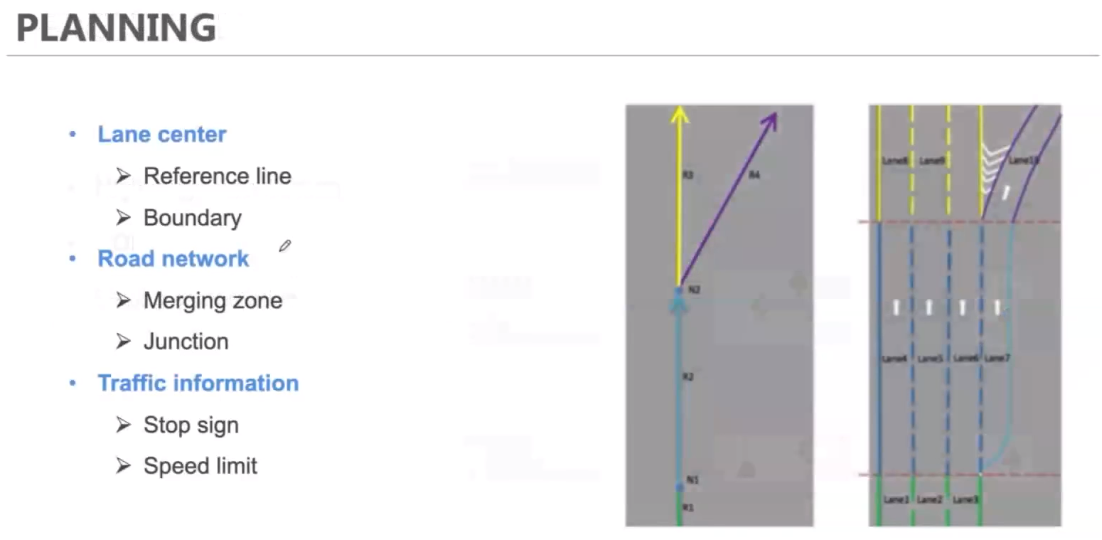
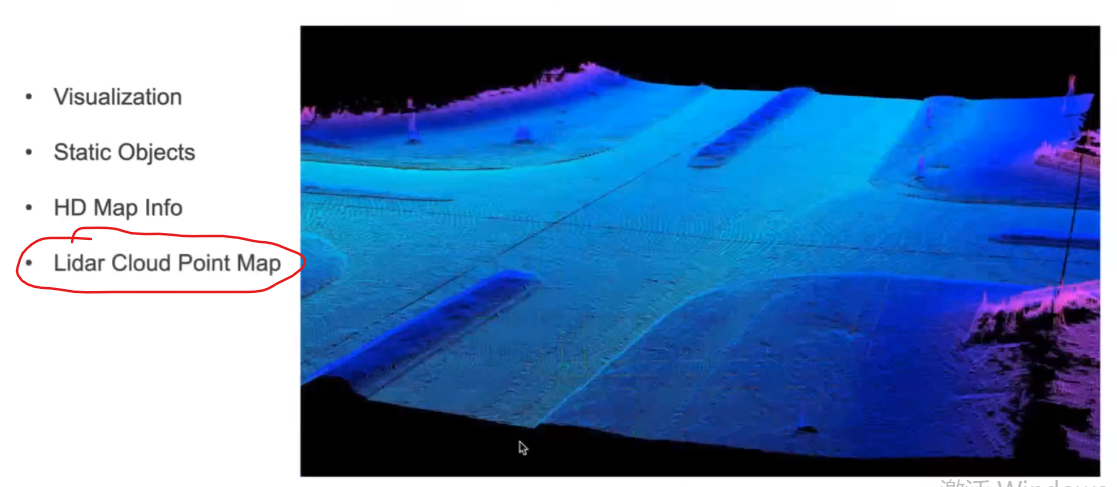
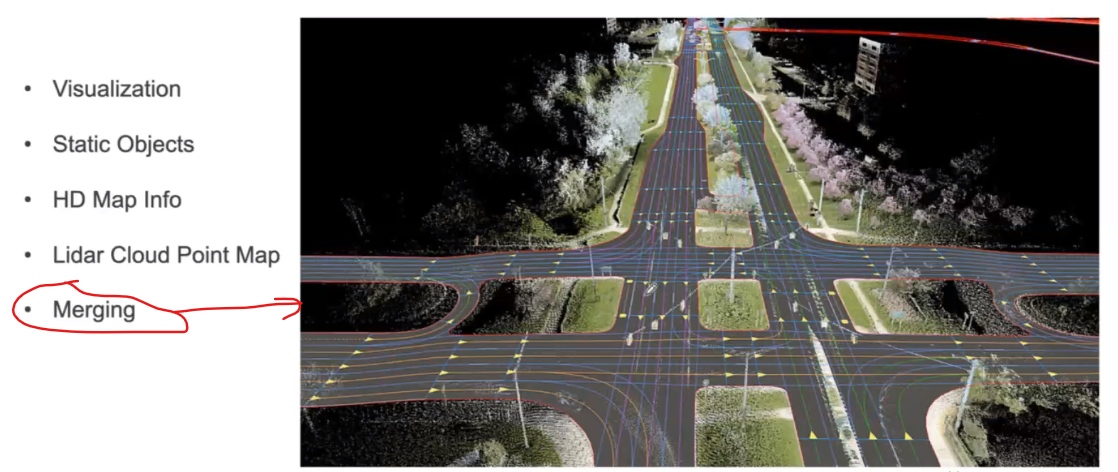
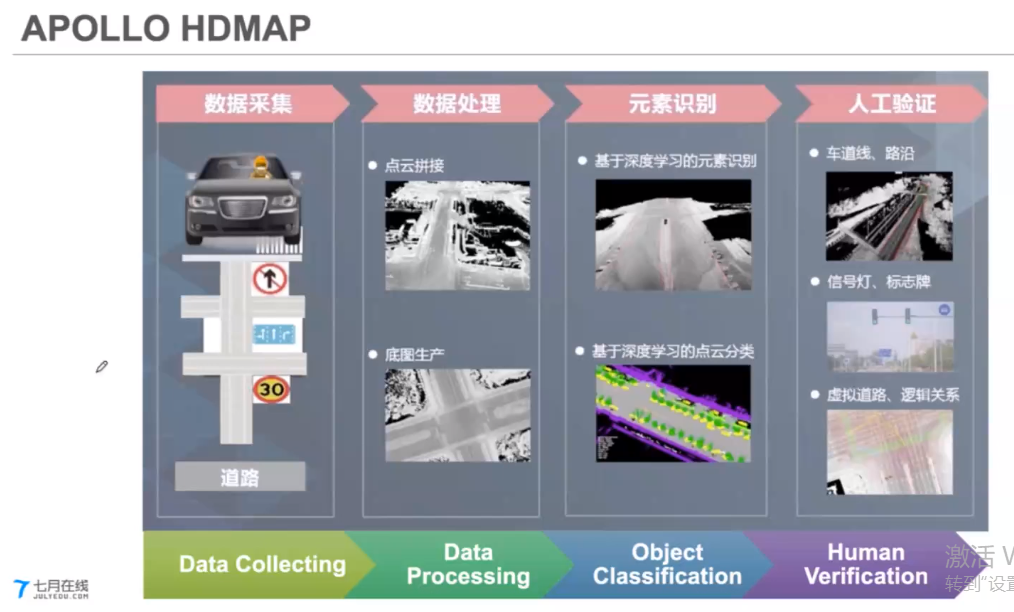
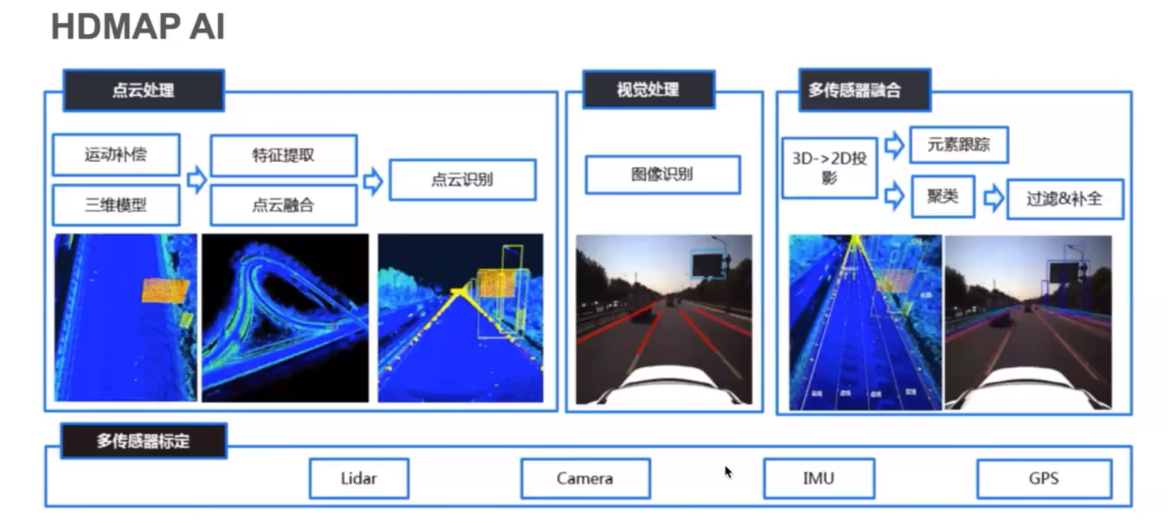
高精地图是如何产生的
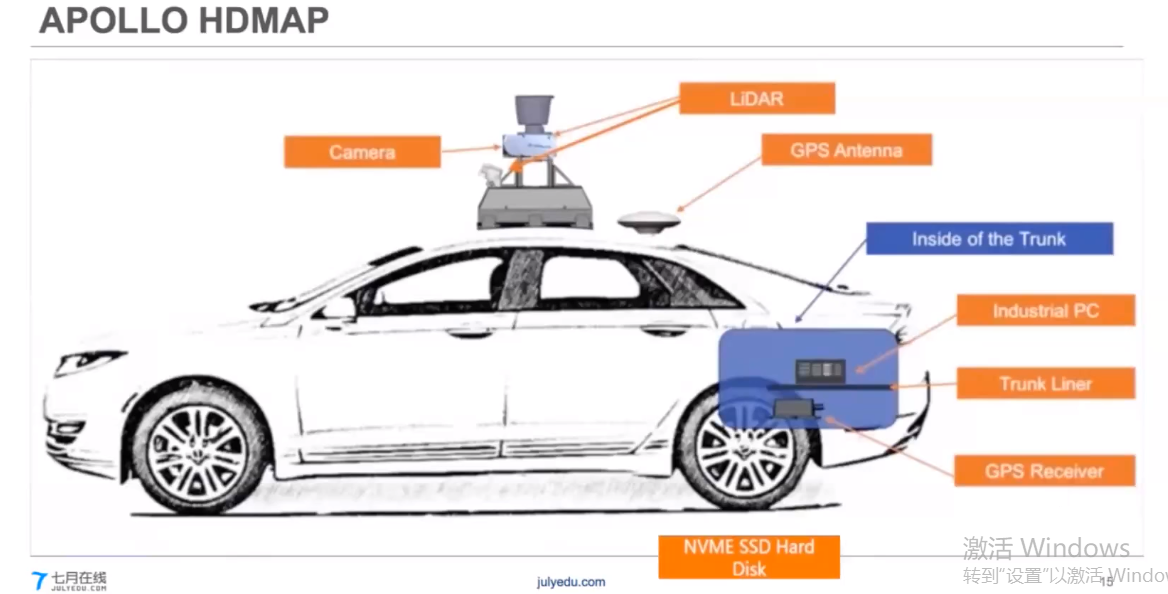
高精地图采集车的配置
基础数据通过采集车采集后,会通过图像的识别-融合做成地图
和SLAM处理过程相似
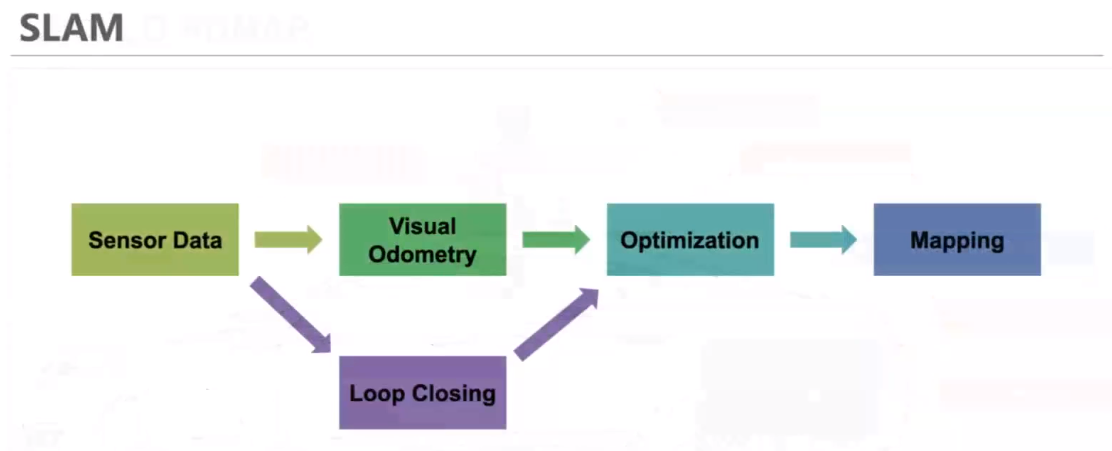
高精地图的制作过程会用到哪些之前学过的主流技术、AI算法

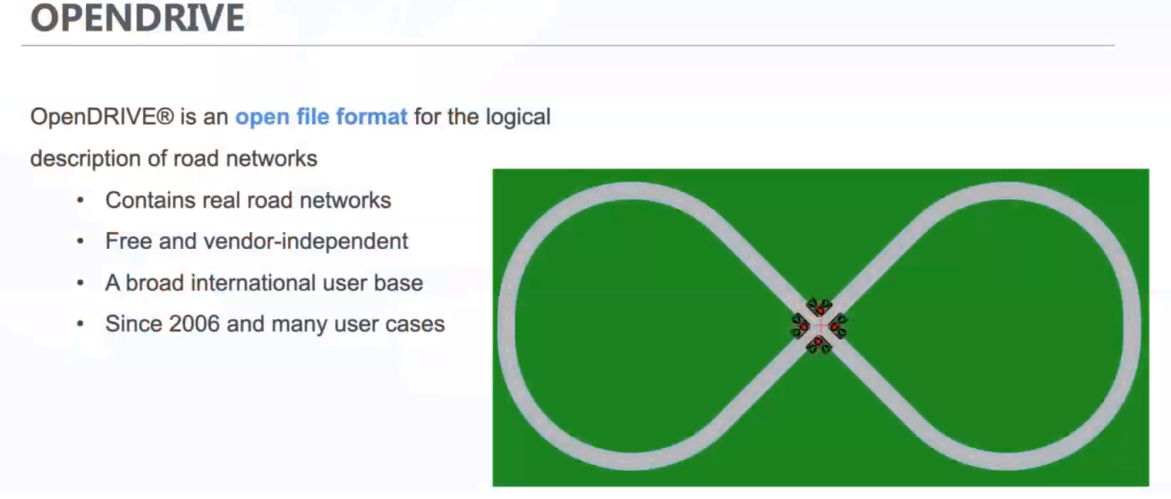
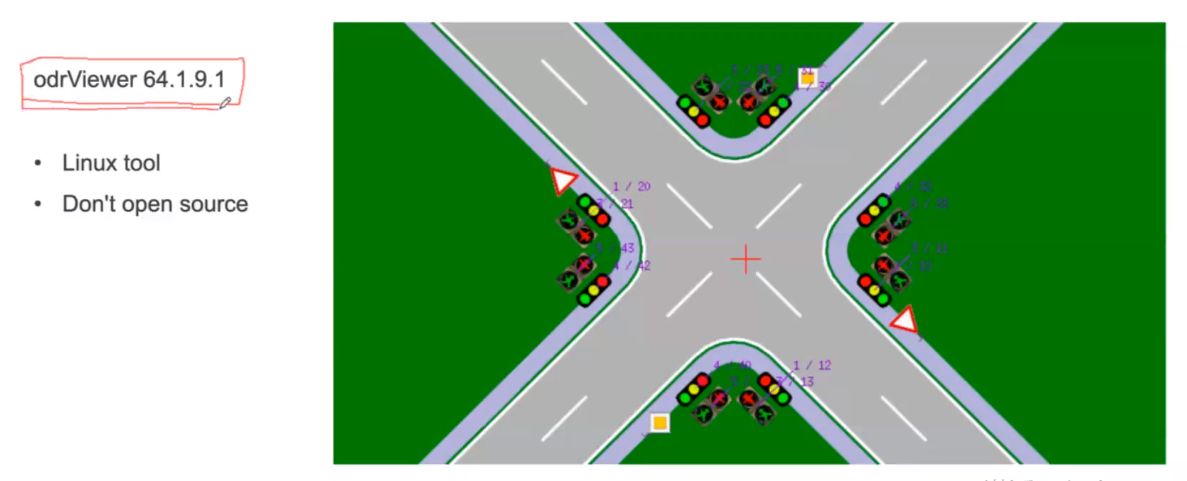
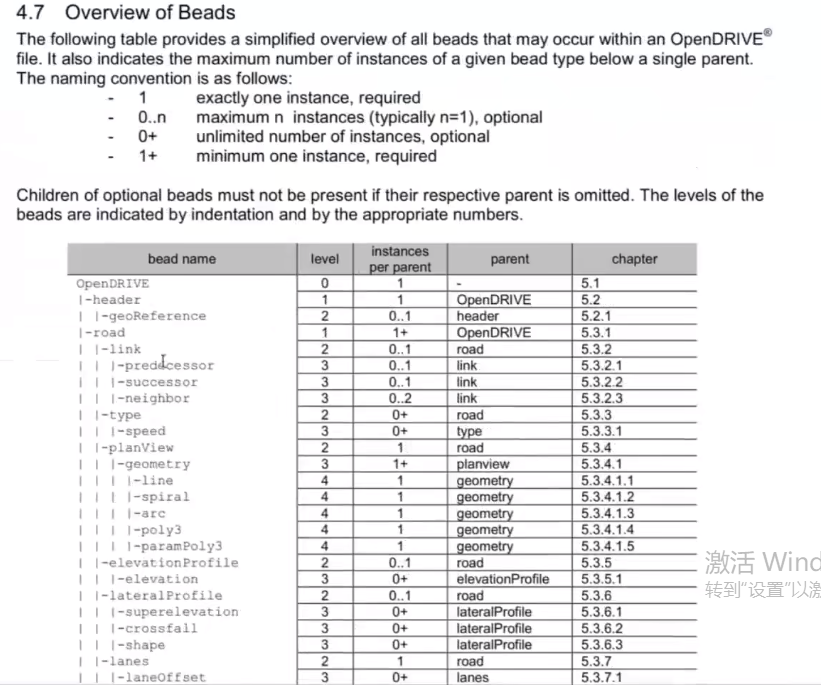
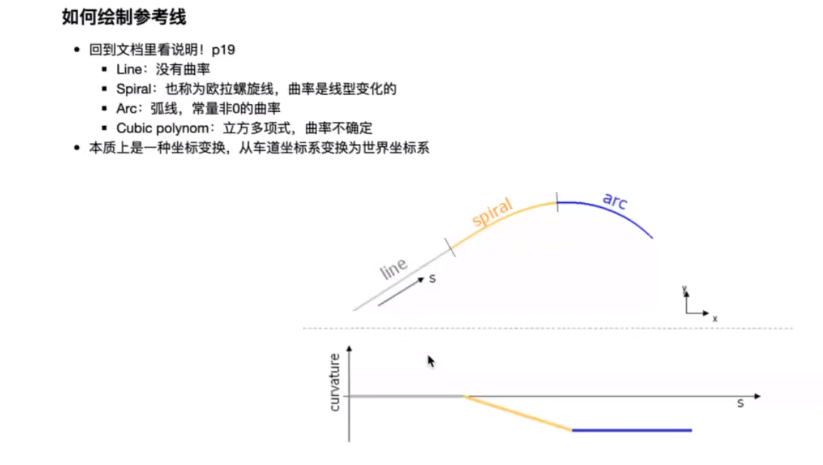
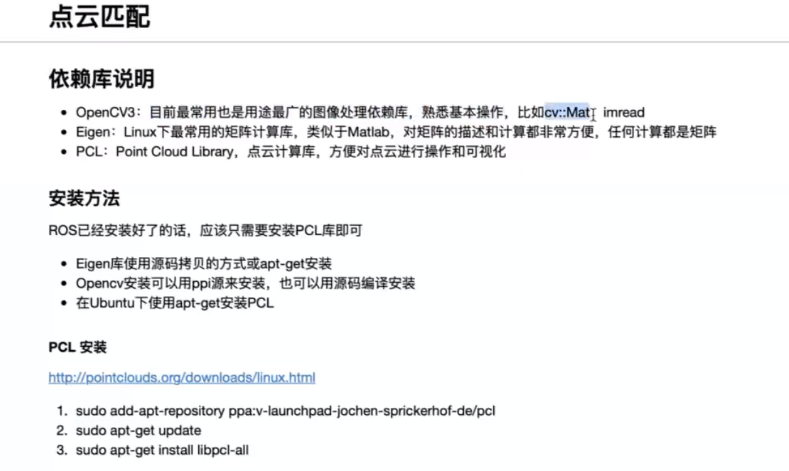
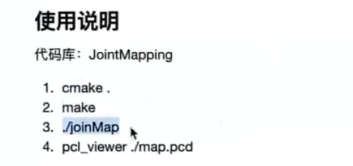
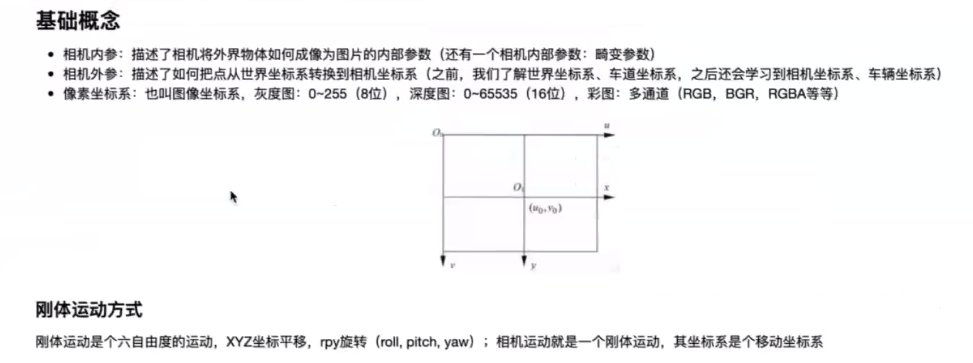
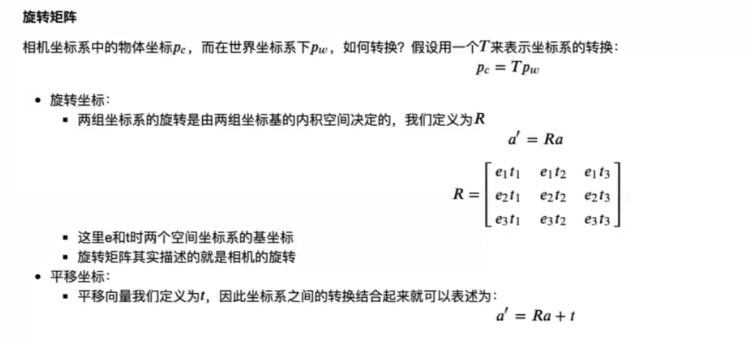
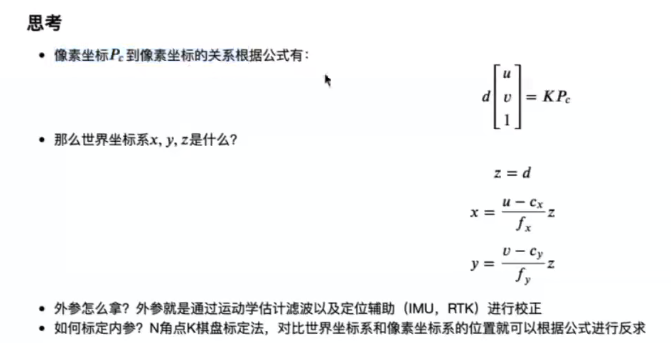
协议
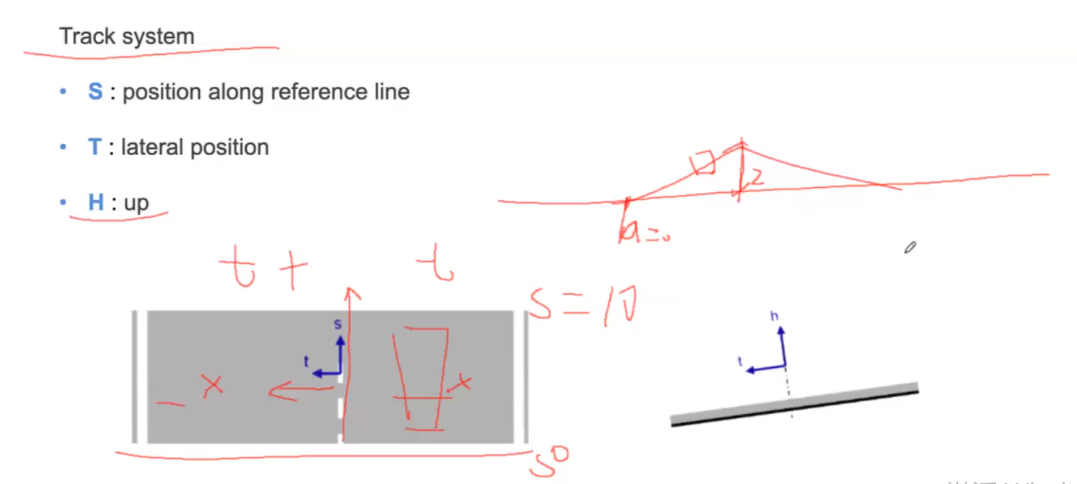
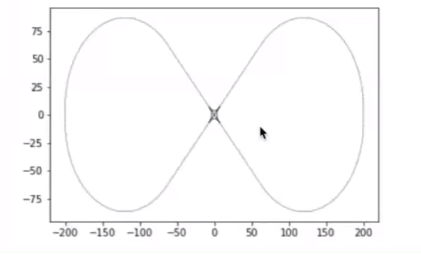
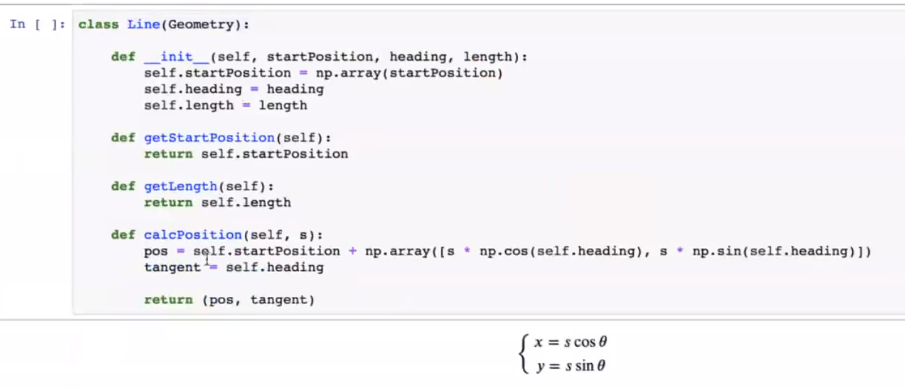
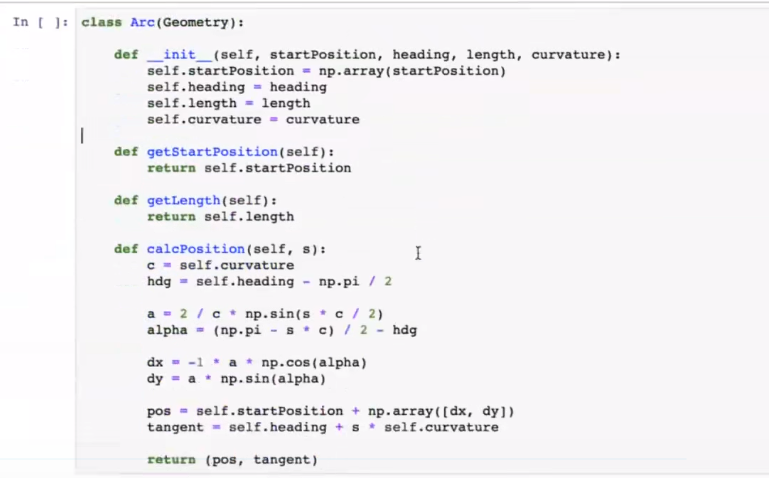
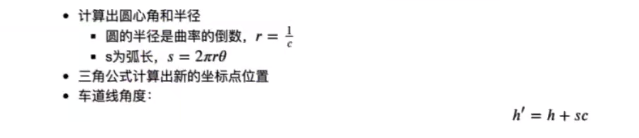
Frenet(车道坐标系)
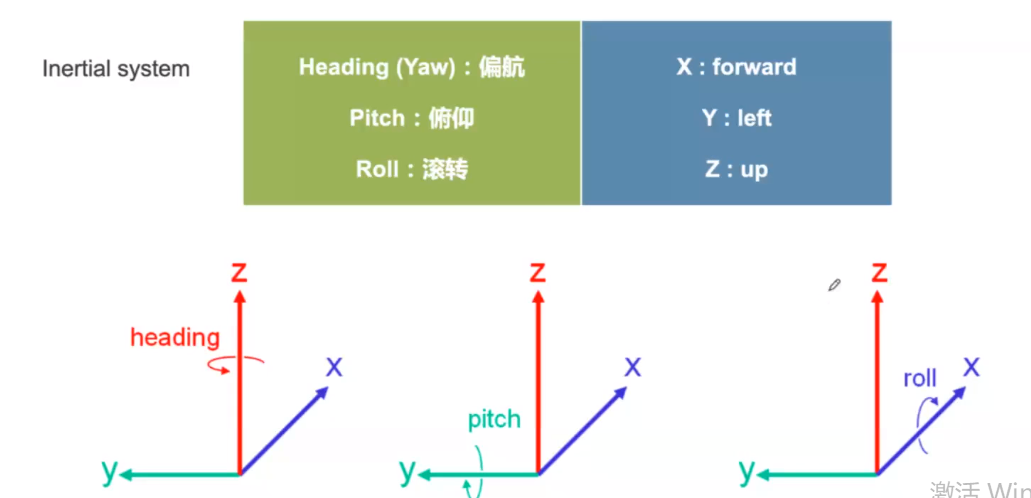
第二个是惯性坐标系(世界坐标系)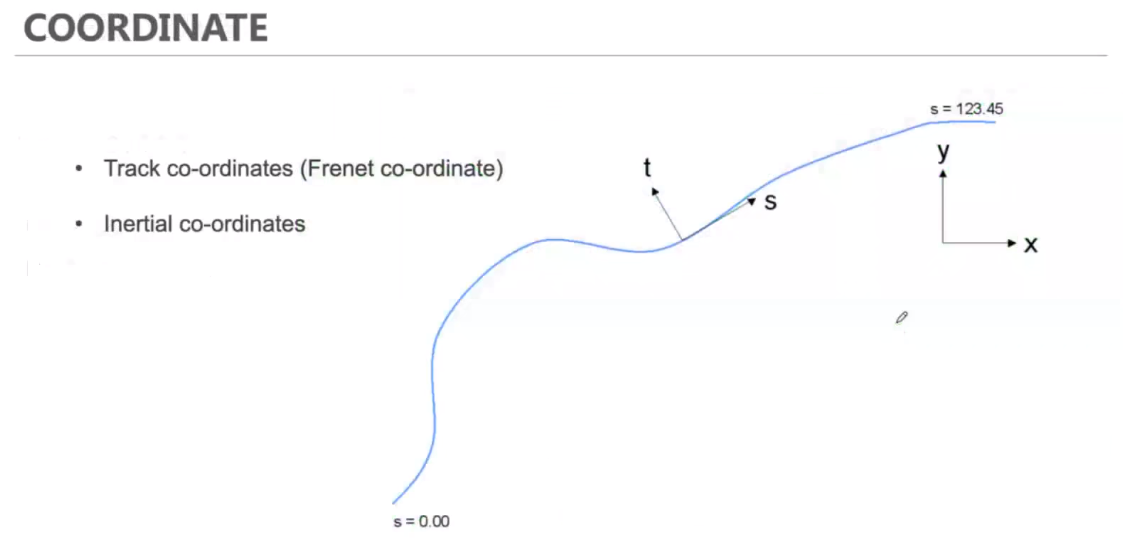




我们向往远方,却忽略了此刻的美丽

 浙公网安备 33010602011771号
浙公网安备 33010602011771号