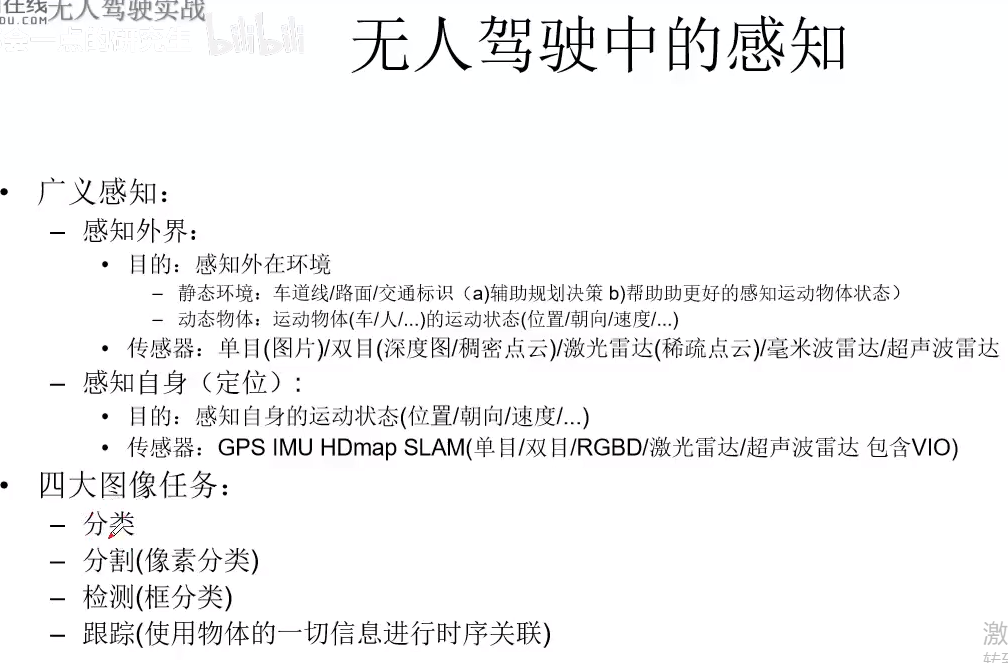
无人驾驶—感知基础
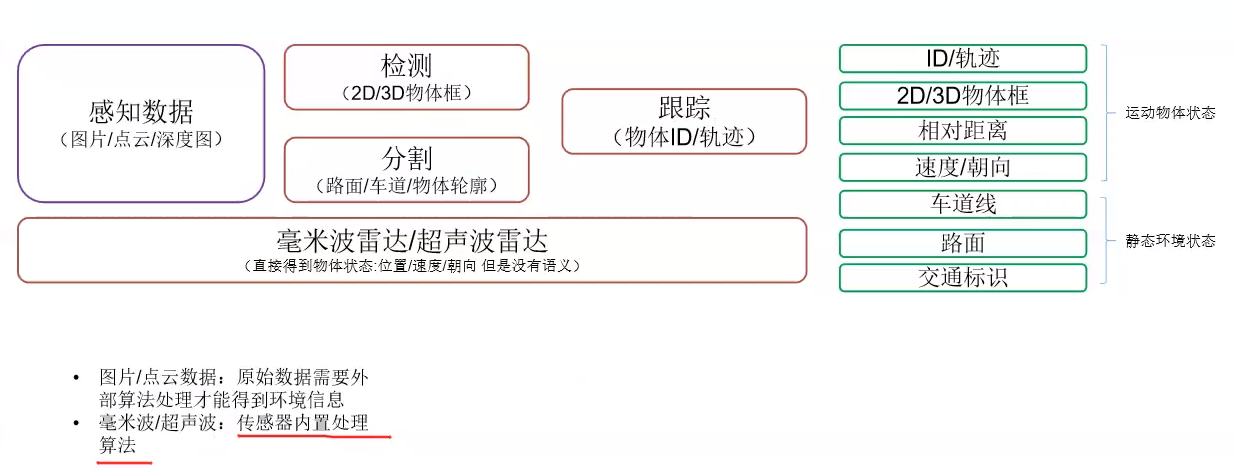
静态环境感知与分割算法
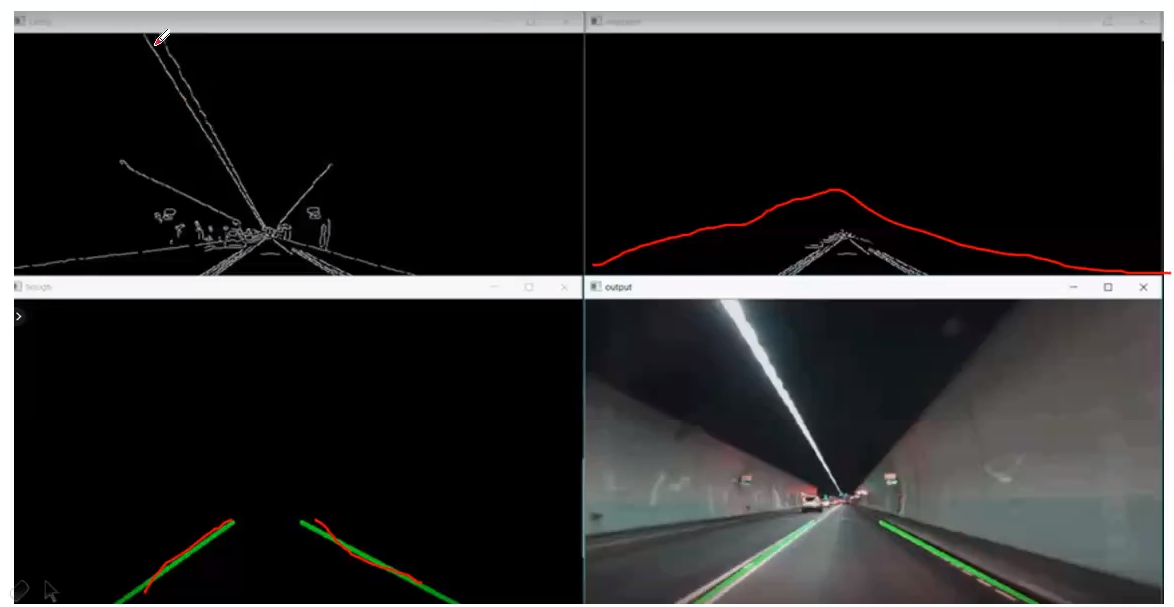
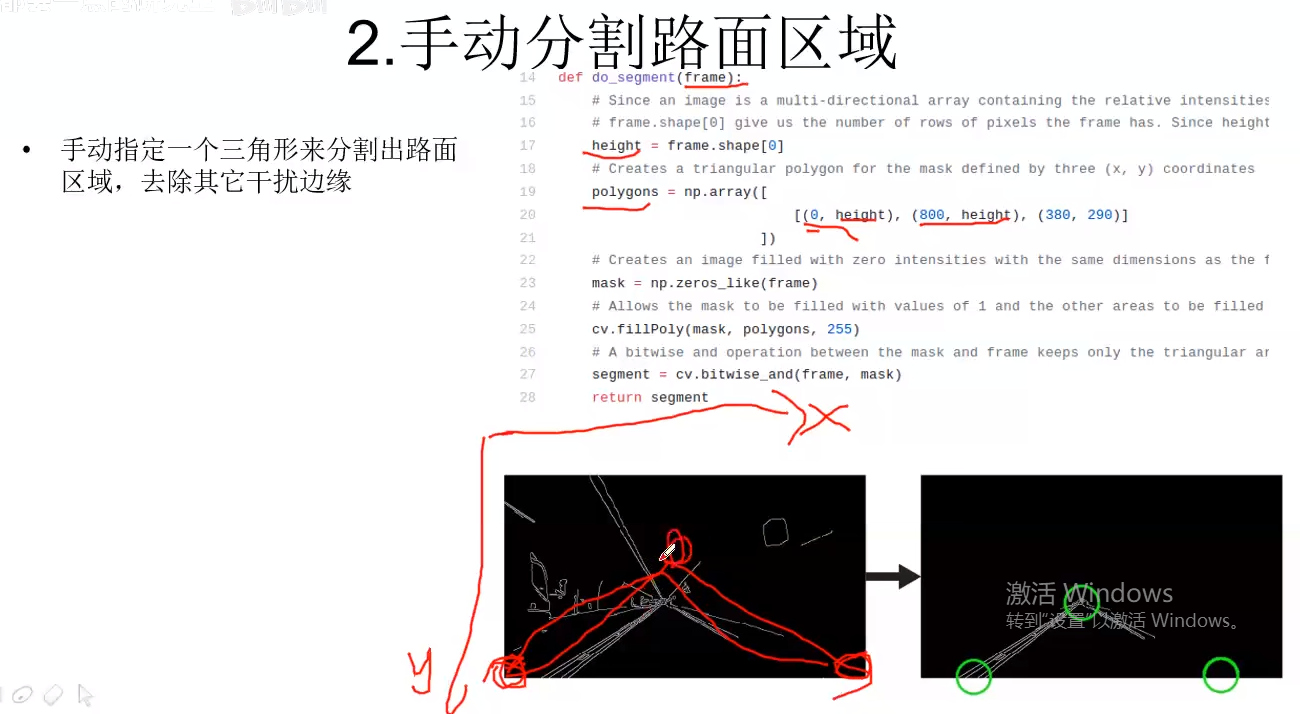
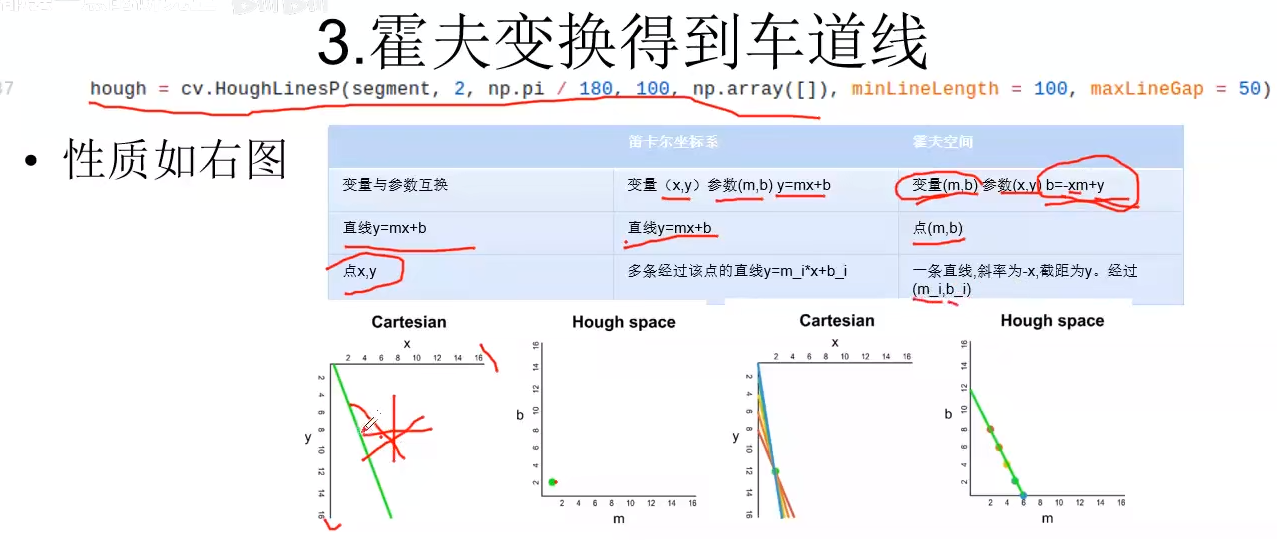
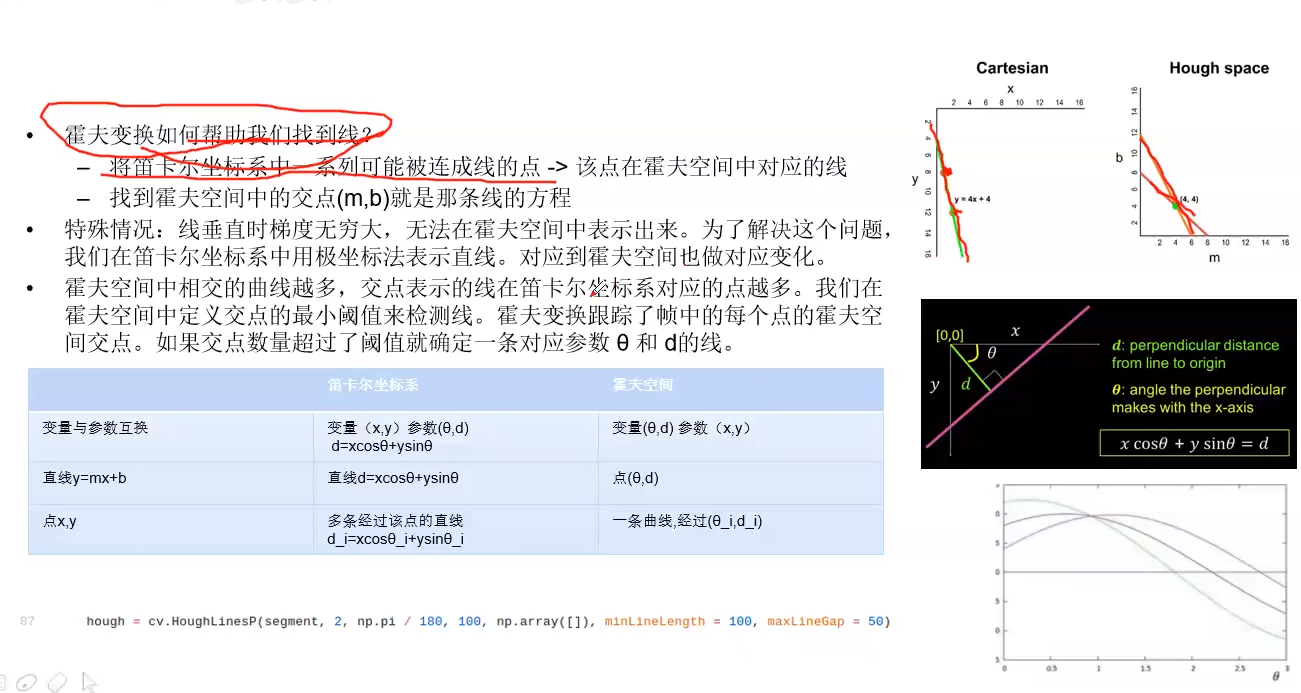
实战基于传统方法的车道线检测
import cv2 as cv import numpy as np # import matplotlib.pyplot as plt def do_canny(frame): # Converts frame to grayscale because we only need the luminance channel for detecting edges - less computationally expensive gray = cv.cvtColor(frame, cv.COLOR_RGB2GRAY) # Applies a 5x5 gaussian blur with deviation of 0 to frame - not mandatory since Canny will do this for us blur = cv.GaussianBlur(gray, (5, 5), 0) # Applies Canny edge detector with minVal of 50 and maxVal of 150 canny = cv.Canny(blur, 50, 150) return canny def do_segment(frame): # Since an image is a multi-directional array containing the relative intensities of each pixel in the image, we can use frame.shape to return a tuple: [number of rows, number of columns, number of channels] of the dimensions of the frame # frame.shape[0] give us the number of rows of pixels the frame has. Since height begins from 0 at the top, the y-coordinate of the bottom of the frame is its height height = frame.shape[0] # Creates a triangular polygon for the mask defined by three (x, y) coordinates polygons = np.array([ [(0, height), (800, height), (380, 290)] ]) # Creates an image filled with zero intensities with the same dimensions as the frame mask = np.zeros_like(frame) # Allows the mask to be filled with values of 1 and the other areas to be filled with values of 0 cv.fillPoly(mask, polygons, 255) # A bitwise and operation between the mask and frame keeps only the triangular area of the frame segment = cv.bitwise_and(frame, mask) return segment def calculate_lines(frame, lines): # Empty arrays to store the coordinates of the left and right lines left = [] right = [] # Loops through every detected line for line in lines: # Reshapes line from 2D array to 1D array x1, y1, x2, y2 = line.reshape(4) # Fits a linear polynomial to the x and y coordinates and returns a vector of coefficients which describe the slope and y-intercept parameters = np.polyfit((x1, x2), (y1, y2), 1) slope = parameters[0] y_intercept = parameters[1] # If slope is negative, the line is to the left of the lane, and otherwise, the line is to the right of the lane if slope < 0: left.append((slope, y_intercept)) else: right.append((slope, y_intercept)) # Averages out all the values for left and right into a single slope and y-intercept value for each line left_avg = np.average(left, axis = 0) right_avg = np.average(right, axis = 0) # Calculates the x1, y1, x2, y2 coordinates for the left and right lines left_line = calculate_coordinates(frame, left_avg) right_line = calculate_coordinates(frame, right_avg) return np.array([left_line, right_line]) def calculate_coordinates(frame, parameters): slope, intercept = parameters # Sets initial y-coordinate as height from top down (bottom of the frame) y1 = frame.shape[0] # Sets final y-coordinate as 150 above the bottom of the frame y2 = int(y1 - 150) # Sets initial x-coordinate as (y1 - b) / m since y1 = mx1 + b x1 = int((y1 - intercept) / slope) # Sets final x-coordinate as (y2 - b) / m since y2 = mx2 + b x2 = int((y2 - intercept) / slope) return np.array([x1, y1, x2, y2]) def visualize_lines(frame, lines): # Creates an image filled with zero intensities with the same dimensions as the frame lines_visualize = np.zeros_like(frame) # Checks if any lines are detected if lines is not None: for x1, y1, x2, y2 in lines: # Draws lines between two coordinates with green color and 5 thickness cv.line(lines_visualize, (x1, y1), (x2, y2), (0, 255, 0), 5) return lines_visualize # The video feed is read in as a VideoCapture object cap = cv.VideoCapture("input.mp4") while (cap.isOpened()): # ret = a boolean return value from getting the frame, frame = the current frame being projected in the video ret, frame = cap.read() canny = do_canny(frame) cv.imshow("canny", canny) # plt.imshow(frame) # plt.show() segment = do_segment(canny) hough = cv.HoughLinesP(segment, 2, np.pi / 180, 100, np.array([]), minLineLength = 100, maxLineGap = 50) # Averages multiple detected lines from hough into one line for left border of lane and one line for right border of lane lines = calculate_lines(frame, hough) # Visualizes the lines lines_visualize = visualize_lines(frame, lines) cv.imshow("hough", lines_visualize) # Overlays lines on frame by taking their weighted sums and adding an arbitrary scalar value of 1 as the gamma argument output = cv.addWeighted(frame, 0.9, lines_visualize, 1, 1) # Opens a new window and displays the output frame cv.imshow("output", output) # Frames are read by intervals of 10 milliseconds. The programs breaks out of the while loop when the user presses the 'q' key if cv.waitKey(10) & 0xFF == ord('q'): break # The following frees up resources and closes all windows cap.release() cv.destroyAllWindows()


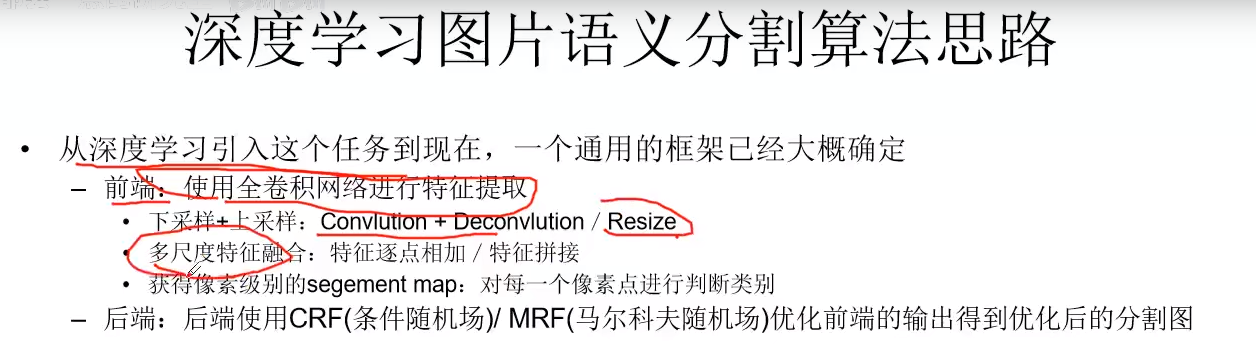
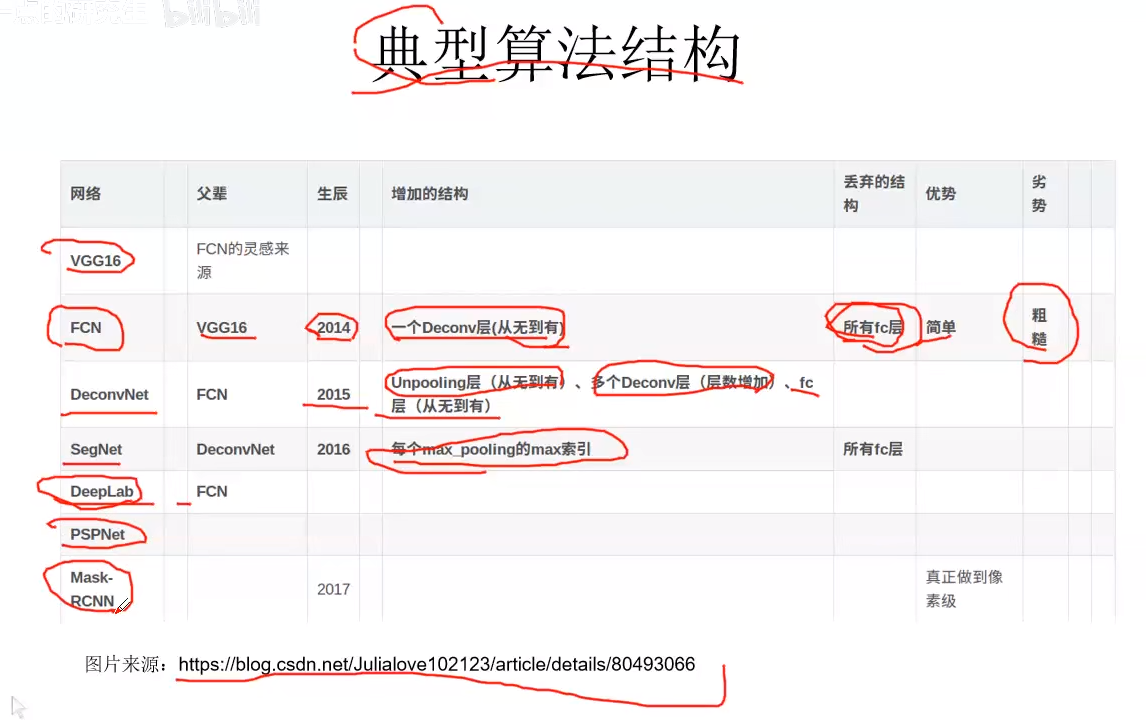
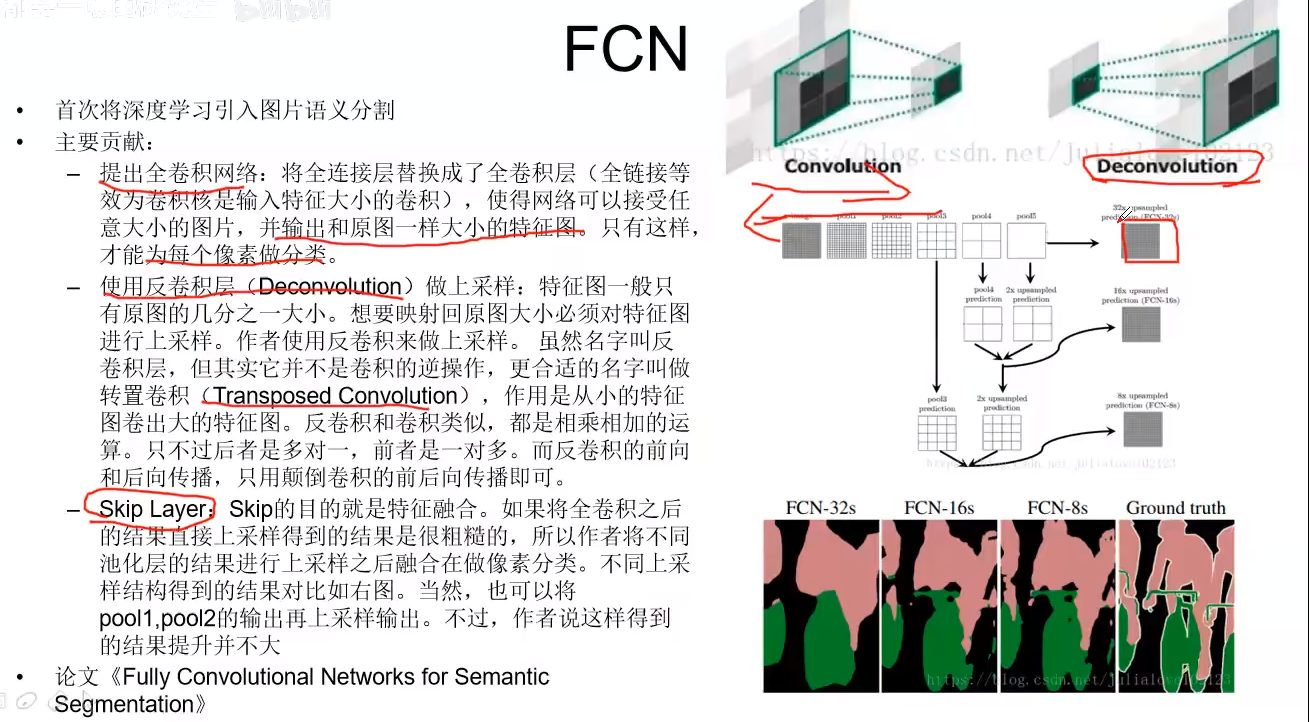
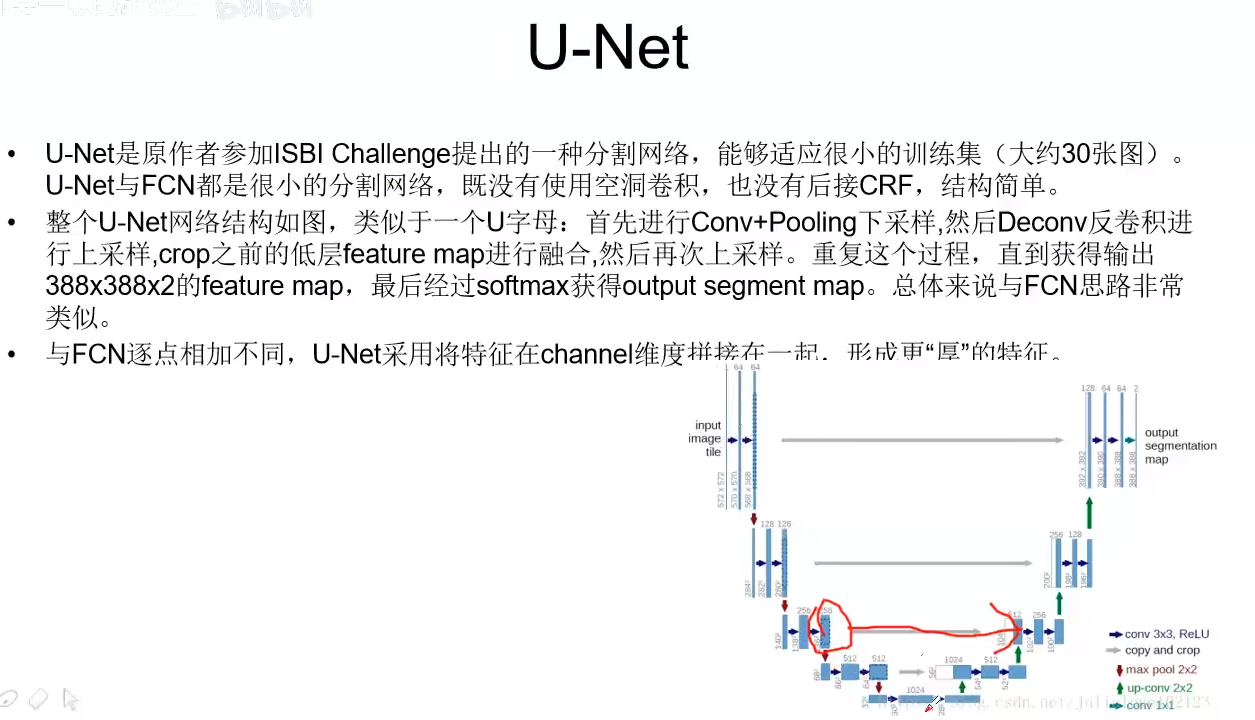
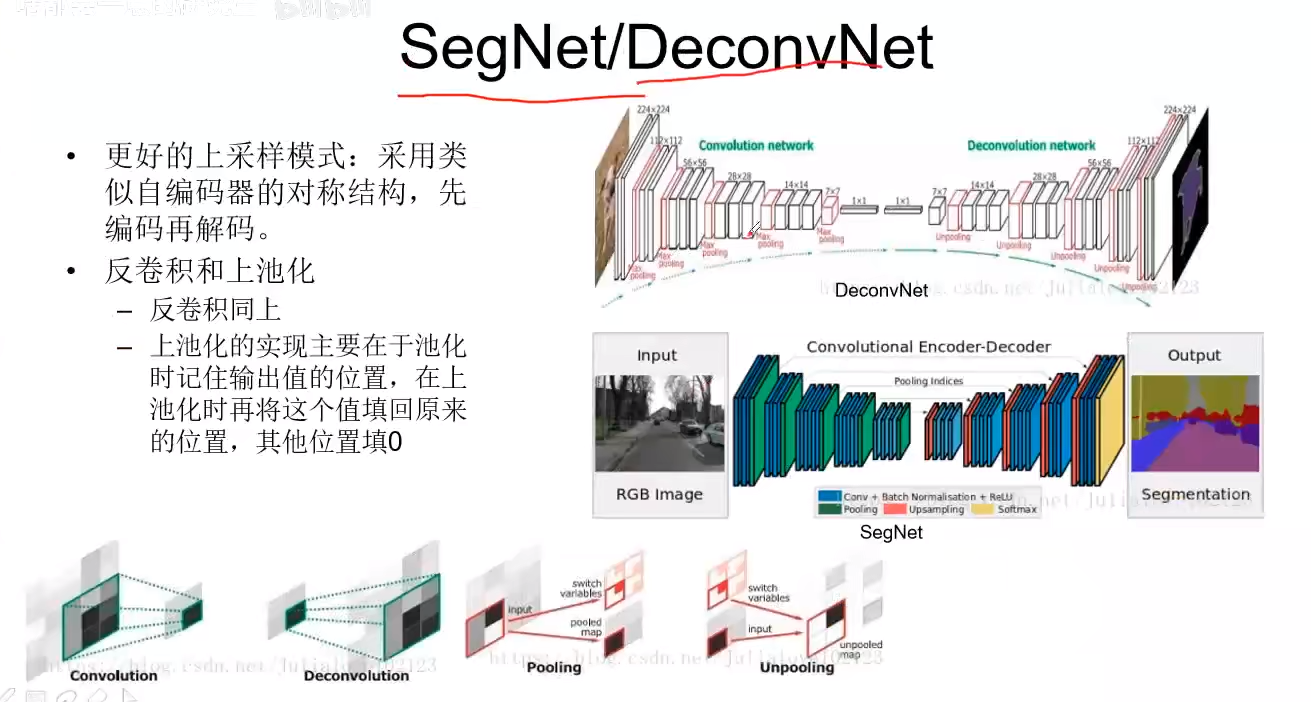
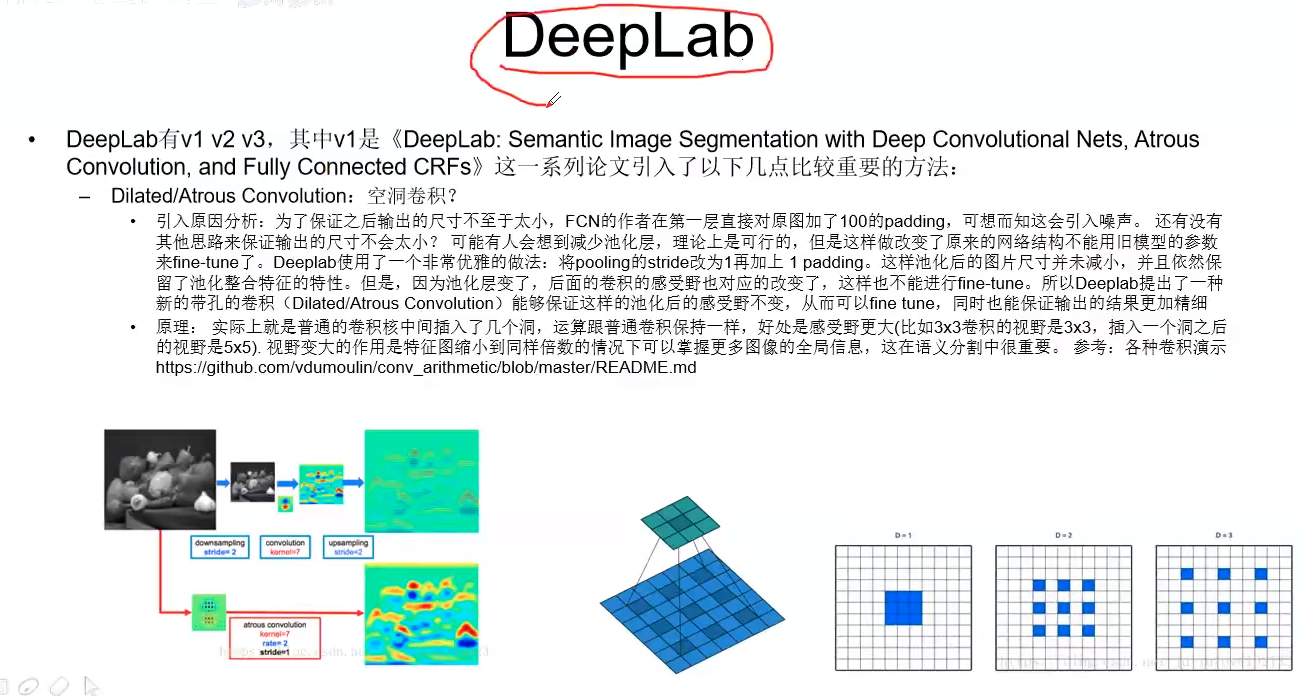
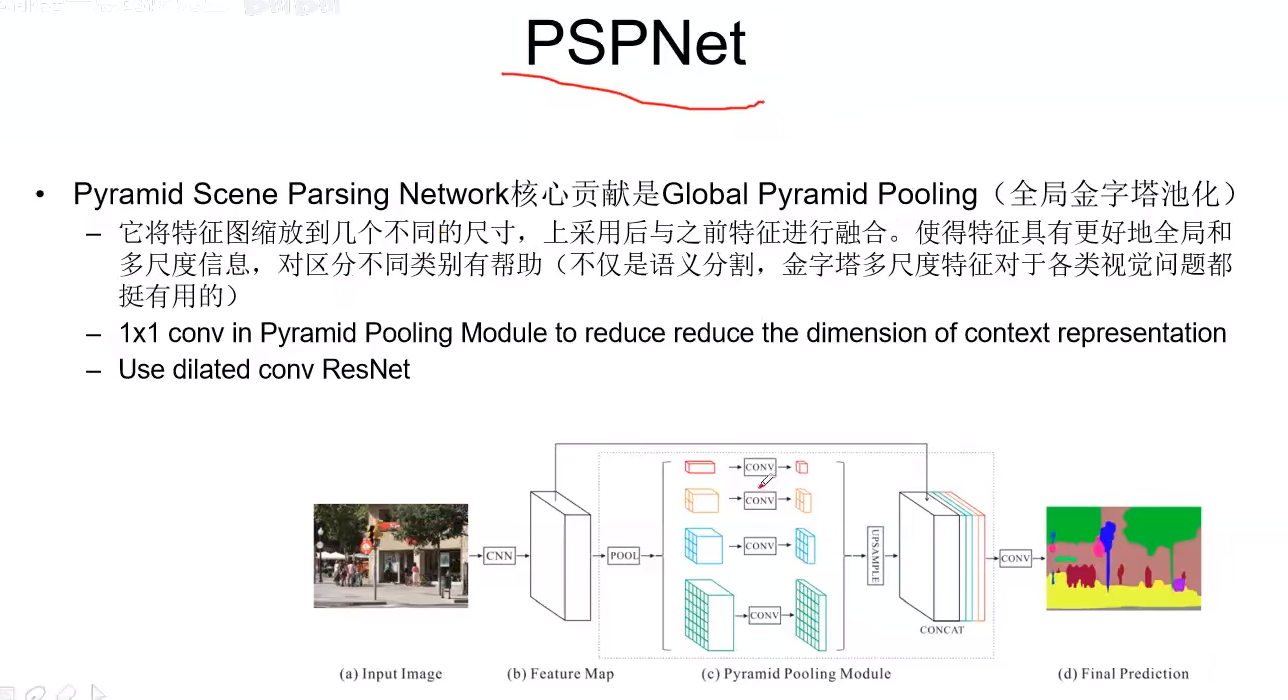
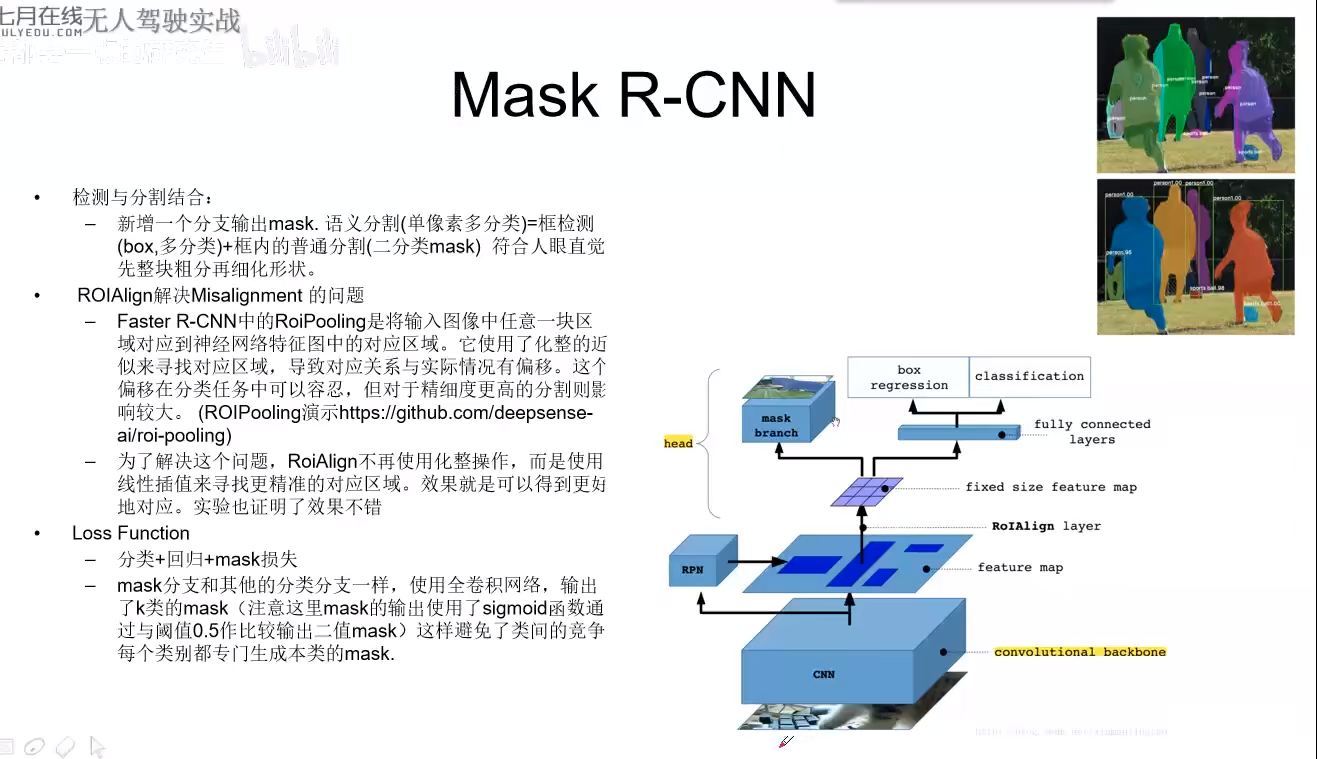
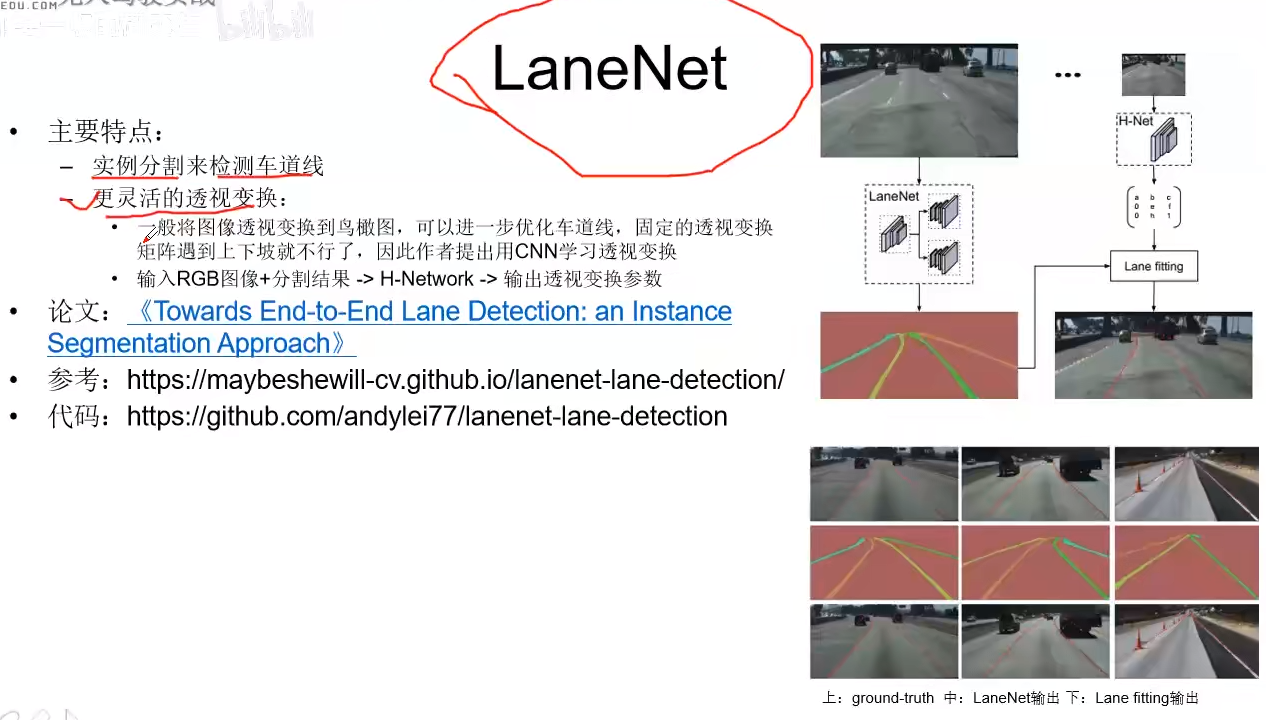
基于深度学习的图片分割算法综述


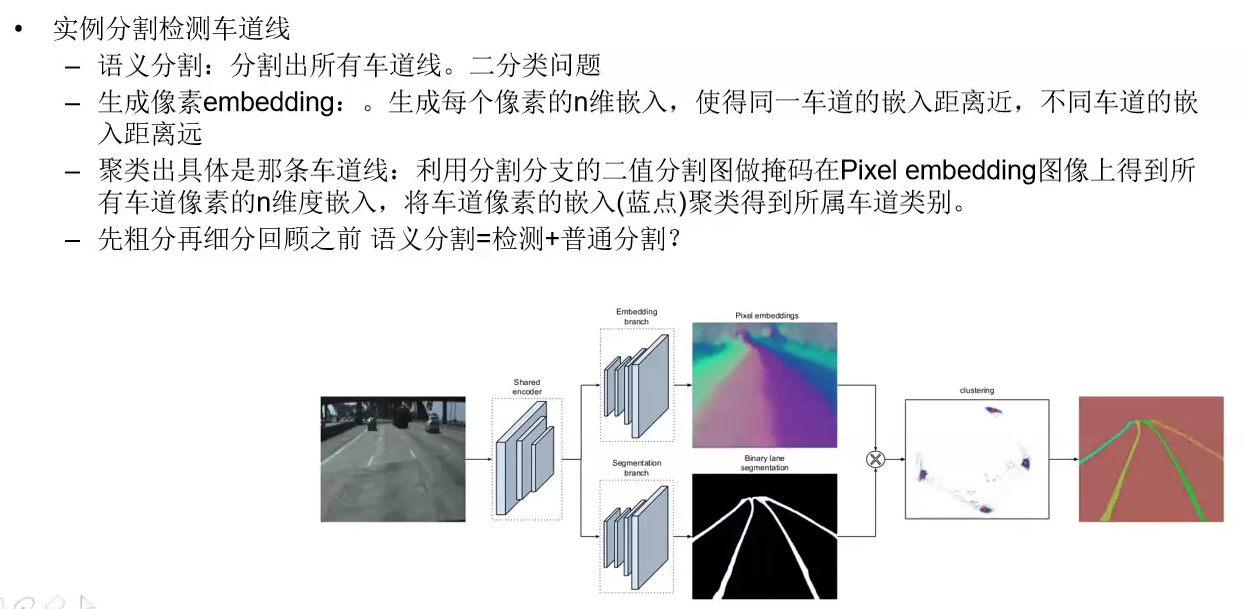
实战基于图片分割的车道线检测

我们向往远方,却忽略了此刻的美丽

 浙公网安备 33010602011771号
浙公网安备 33010602011771号