多传感器融合
链接:https://zhuanlan.zhihu.com/p/47999960
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
2018年,L3等级的自动驾驶汽车陆续出现在市场上。奥迪的第一款L3自动驾驶汽车奥迪A8旗舰轿车,也是全球首款达到L3级别的自动驾驶量产车。以自动驾驶功能在高速公路上行驶,时速为60KM/h或者更低。驾驶员无需时刻监控驾驶环境。
在当时,奥迪A8为何这么牛?它是如何达到L3水平的呢?丰富的传感器功不可没。
A8的自动驾驶传感器配置是所有量产车型中最丰富的,搭载了7种类型的传感器,共计24个。不仅有完备的长短距离的毫米波雷达和前置摄像头,以及复杂路况自动驾驶不可或缺的激光雷达,还有自动泊车神器——超声波雷达和4路高清环视摄像头。使用多个传感器监控相同方向,这对于防止误报警来说也是必不可少的。
一方面,零部件供应商认为:“在下高速匝道之前,没有激光雷达也可以。”,而汽车厂商认为:“认为高速路上变道的时候毫米波雷达分辨率不够,仍然需要激光雷达。“甚至有车厂预计实现L4需要5个激光雷达。关于传感器,行业内意见分歧很大,无论是安装的个数还是位置,都没有办法明确。
为了进一步推进自动驾驶的发展,我们似乎需要继续探索。
自动泊车、公路巡航控制和自动紧急制动等自动驾驶汽车功能在很大程度上是依靠传感器来实现的。重要的不仅仅是传感器的数量或种类,它们的使用方式也同样重要。目前,大多数路面上行驶车辆内的ADAS都是独立工作的,这意味着它们彼此之间几乎不交换信息。只有把多个传感器信息融合起来,才是实现自动驾驶的关键。
试想一下,如果一个传感器所得到的信息要求汽车立即刹车,而另一传感器显示可以继续安全行驶,或者一个传感器要求汽车左转,而另一个传感器要求汽车右转,在这种情况下,如果不对传感器信息进行融合,汽车就会“感到迷茫而不知所措”,最终可能导致意外的发生。因此在使用多种(个)传感器的情况下,要想保证安全性,就必须对传感器进行信息融合。
多传感器融合可显著提高系统的冗余度和容错性,从而保证决策的快速性和正确性,是无人驾驶的必然趋势。各种传感器性能各有优劣,在不同的应用场景里都可以发挥独特的优势,仅依靠单一或少数传感器难以完成无人驾驶的使命。
未来要实现无人驾驶,多传感器融合是必然趋势。
多传感器融合要求:
1 )硬件层面:数量要足够,也就是不同种类的传感器都要配备,才能够保证信息获取充分且有冗余;
2 )软件层面:算法要足够优化,数据处理速度要够快,且容错性要好,才能保证最终决策的快速性和正确性。
算法是多传感器融合的核心
多传感器数据融合技术的基本原理就像人脑综合处理信息一样,充分利用多个传感器资源,通过对多传感器及其观测信息的合理支配和使用,把多传感器在空间或时间上冗余或互补信息依据某种准则来进行组合,以获得被测对象的一致性解释或描述。
简单地说,传感器融合就是将多个传感器获取的数据、信息集中在一起综合分析以便更加准确可靠地描述外界环境,从而提高系统决策的正确性。
融合算法要足够优化,因为多传感器的使用会使需要处理的信息量大增,这其中甚至有相互矛盾的信息,如何保证系统快速地处理数据,过滤无用、错误信息,从而保证系统最终做出及时正确的决策十分关键。目前多传感器融合的理论方法有贝叶斯准则法、卡尔曼滤波法、D-S 证据理论法、模糊集理论法、人工神经网络法等。
多传感器融合的体系结构
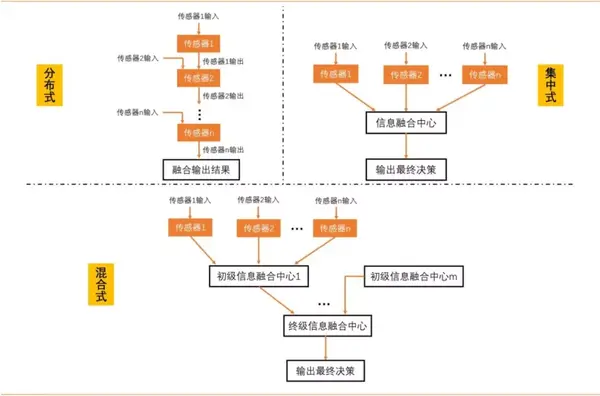
多传感器融合的体系结构:分布式、集中式和混合式。
1)分布式:先对各个独立传感器所获得的原始数据进行局部处理,然后再将结果送入信息融合中心进行智能优化组合来获得最终的结果。分布式对通信带宽的需求低、计算速度快、可靠性和延续性好,但跟踪的精度却远没有集中式高。
2 )集中式:集中式将各传感器获得的原始数据直接送至中央处理器进行融合处理,可以实现实时融合。其数据处理的精度高,算法灵活,缺点是对处理器的要求高,可靠性较低,数据量大,故难于实现。
3)混合式:混合式多传感器信息融合框架中,部分传感器采用集中式融合方式,剩余的传感器采用分布式融合方式。混合式融合框架具有较强的适应能力,兼顾了集中式融合和分布式的优点,稳定性强。混合式融合方式的结构比前两种融合方式的结构复杂,这样就加大了通信和计算上的代价。
多传感器信息融合的分类
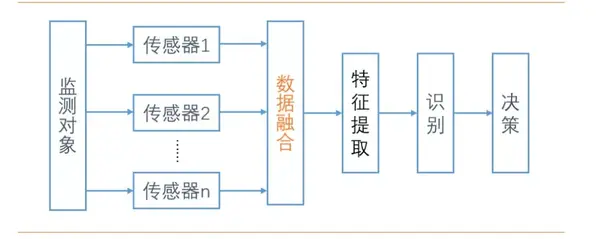
多传感器信息融合的分类:数据级融合、特征级融合和决策级融合
1)数据级融合:针对传感器采集的数据,依赖于传感器类型,进行同类数据的融合。数据级的融合要处理的数据都是在相同类别的传感器下采集,所以数据融合不能处理异构数据。
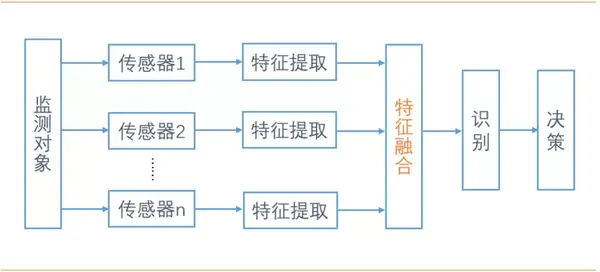
2)特征级融合:提取所采集数据包含的特征向量,用来体现所监测物理量的属性,这是面向监测对象特征的融合。如在图像数据的融合中,可以采用边沿的特征信息,来代替全部数据信息。
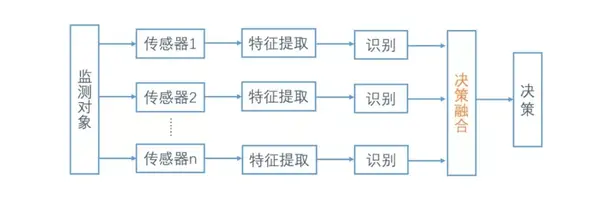
3)决策级融合:根据特征级融合所得到的数据特征,进行一定的判别、分类,以及简单的逻辑运算,根据应用需求进行较高级的决策,是高级的融合。决策级融合是面向应用的融合。
多传感器融合在硬件层面并不难实现,重点和难点都在算法上。多传感器融合软硬件难以分离,但算法是重点和难点,拥有很高的技术壁垒,因此算法将占据价值链的主要部分。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号