s函数中积分程序更改
function [sys,x0,str,ts,simStateCompliance] = int_hyo(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
case 2,
sys=mdlUpdate(t,x,u);
case 3,
sys=mdlOutputs(t,x,u);
case 4,
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9,
sys=mdlTerminate(t,x,u);
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 1;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 1;
sizes.NumInputs = 1;
sizes.DirFeedthrough = 0;
sizes.NumSampleTimes = 1; % at least one sample time is needed
sys = simsizes(sizes);
x0 = [-1]; %之前这里是0,改为1,应为x0代表-cos(t)在0初始时刻应该为-1
str = [];
ts = [0 0];
simStateCompliance = 'UnknownSimState';
function sys=mdlDerivatives(t,x,u)
sys = u;
function sys=mdlUpdate(t,x,u)
sys=[];
function sys=mdlOutputs(t,x,u)
sys=x ;
function sys=mdlGetTimeOfNextVarHit(t,x,u)
sampleTime = 1; % Example, set the next hit to be one second later.
sys = t + sampleTime;
function sys=mdlTerminate(t,x,u)
sys = [];
simulink模型为
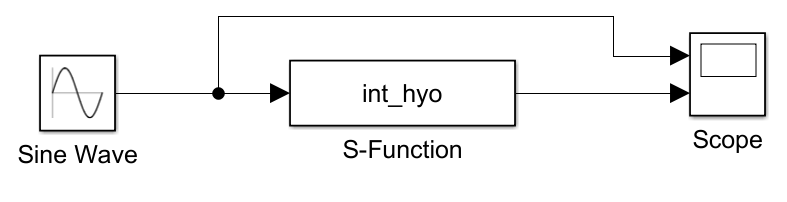
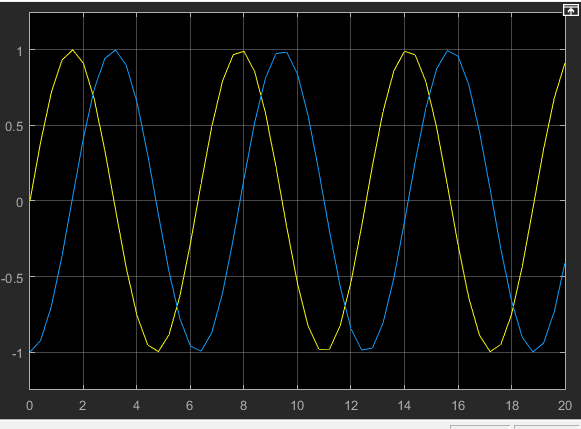
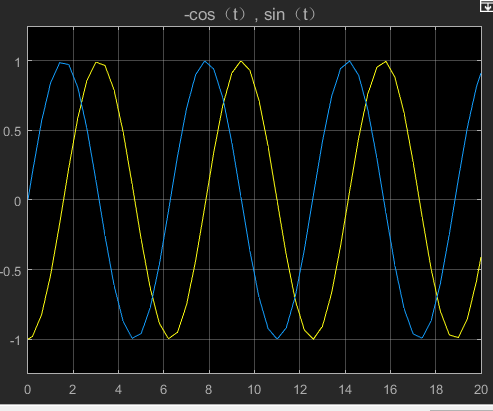
图像为
上面的x0 = [-1]; %之前这里是0,改为1,应为x0代表-cos(t)在0初始时刻应该为-1为什么这么改?
这是关于状态变量是什么的问题(x0表示状态变量,赋值是表示初始时刻状态变量的值),如果状态变量表示x = sin(t)时,这里为0,但是根据程序来看这里的状态变量选择的并不是x = sin(t),而是x = -cos(t),为什么这么说呢?
因为程序中调用了
function sys=mdlDerivatives(t,x,u)
sys = u;
function sys=mdlOutputs(t,x,u) sys=x ;
输入(即sint(t))积分结果通过sys间接给了x状态变量,x是一个表示sin(t)积分后的变量,你想想这个状态变量到底是什么,不就是x = -cos(t)吗?如果不明白为什么积分后间接给x状态变量这句话,不要着急下面一篇文章能够让你清楚mdlDerivatives函数内部的原理
之前看到s函数那篇文章中积分这一节程序时,看到最后的图像感觉有问题,但是不知道程序中哪个地方出错了,主要还是不是很理解function sys=mdlDerivatives(t,x,u)的用法。看了一个博主的文章瞬间对这个子函数理解了,在这里将此博主的文章搬运过来便于阅读
原文链接:https://blog.csdn.net/qq_43159983/article/details/104644017
Matlab S函数 function sys=mdlDerivatives(t,x,u)
设函数为 h’’ = 1/J*(ut+dt)
1 s函数里 的x状态含义:
状态1: x(1) —表示状态值h
状态2: x(2) —表示状态值的导数(或称速度)h’
2 function sys=mdlDerivatives(t,x,u)
在控制系统中,该函数可用于描述微分方程,例如描述被控对象和自适应率等,并采用数值分析方法(如ODE方法)实现模型的自动求解。如下:
function sys=mdlDerivatives(t,x,u)
J=2;
dt=sin(t);
ut=u(1);
sys(1)=x(2);
sys(2)=1/J*(ut+dt); //注: 1/J*(ut+dt)为一个二阶导函数
function sys=mdlOutputs(t,x,u)
sys(1)=x(1);
sys(2)=x(2);
sys(1)根据x(2) 解出 函数里变量值 h ——状态1,即x(2)积分后赋给sys(1)。
sys(2)根据二阶导函数’1/J*(ut+dt)‘解出一阶导数 h’ ——状态2,即1/J*(ut+dt)积分后赋给sys(2)。
最后,sys通过中间变量x传输到Output的x里面。
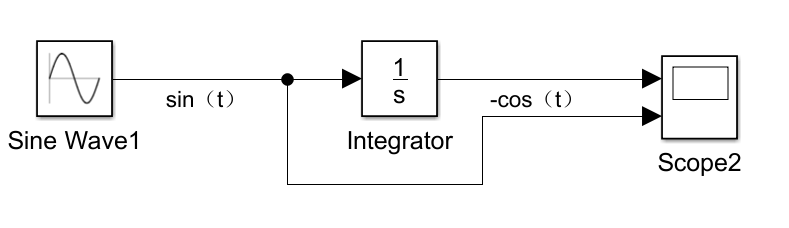
这里和simulink中的积分模块做下对比
simulink中的模型
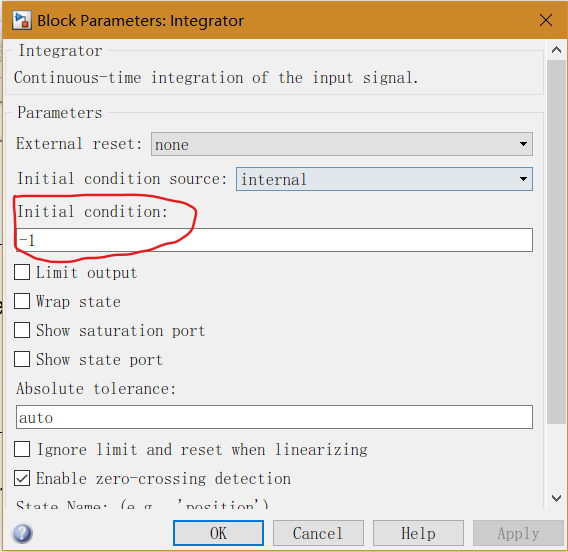
这里1/s模块内需要设置初始状态为-1(也是表示的-cos(t)初始时刻的值)
图像结果

 浙公网安备 33010602011771号
浙公网安备 33010602011771号