11_滞后补偿器_Lag Compensator_Matlab_Simulink
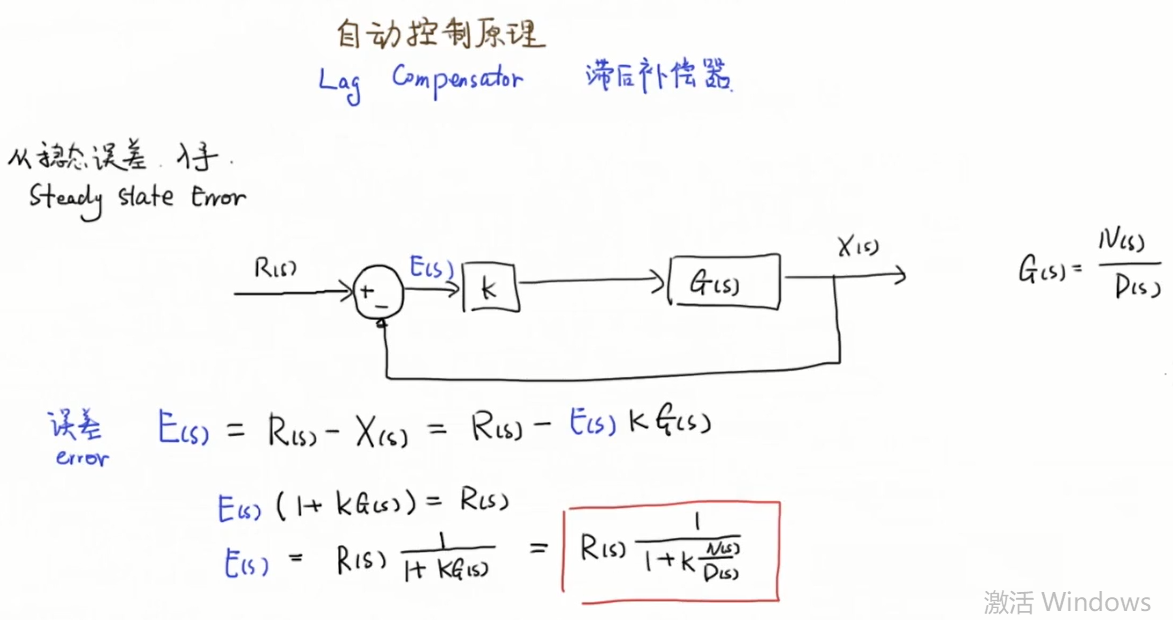

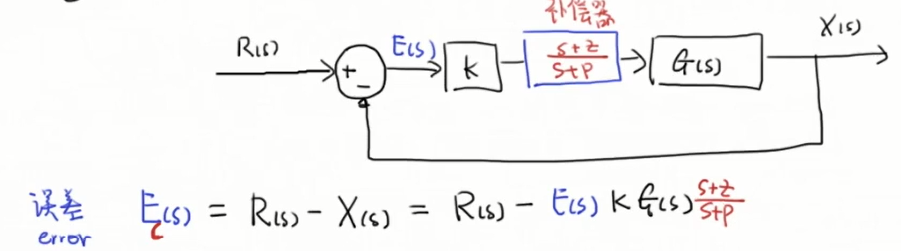

下图中左边没有补偿器的稳态误差,右边是有只猴补偿器的稳态误差,H(s)为滞后补偿器的原因是H(s)bode图的相位图是负的
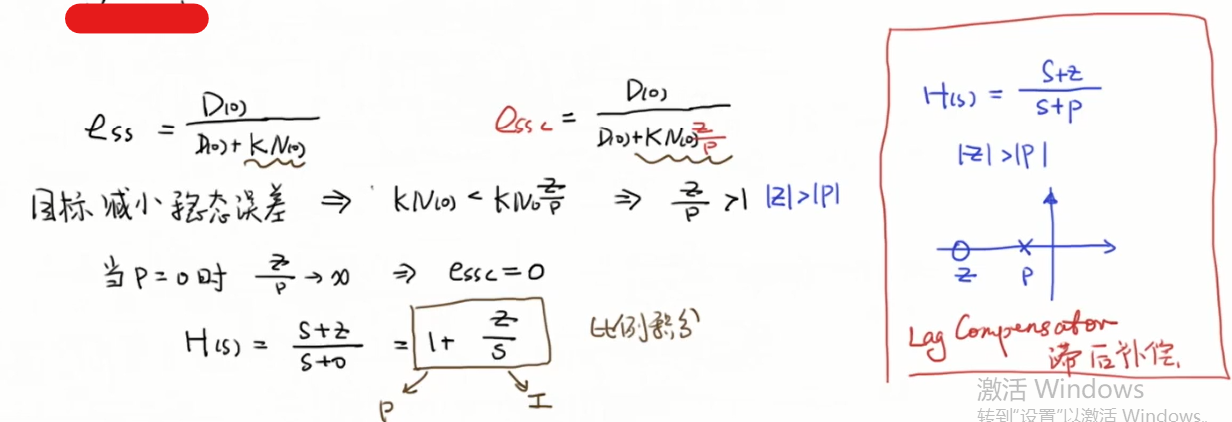
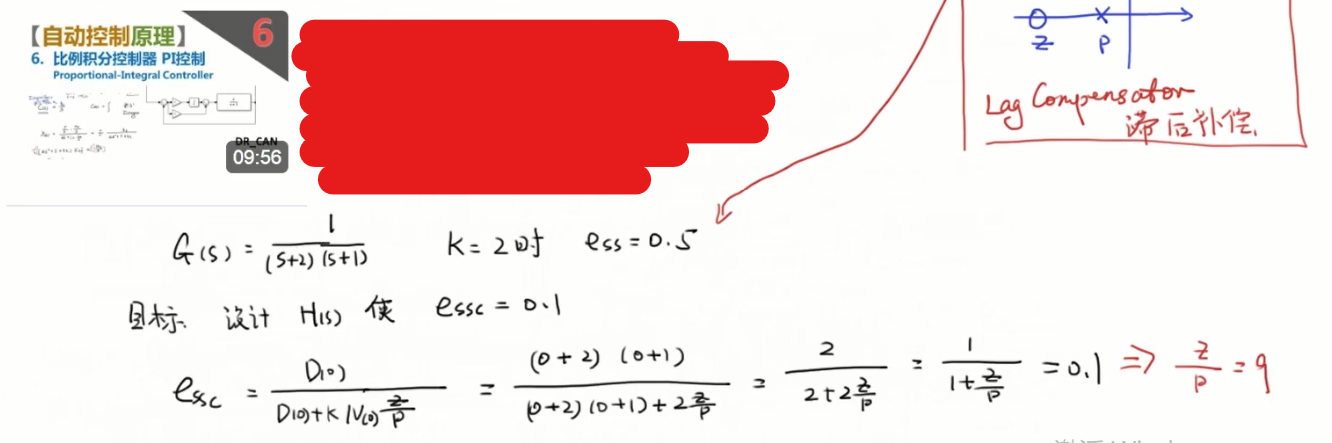
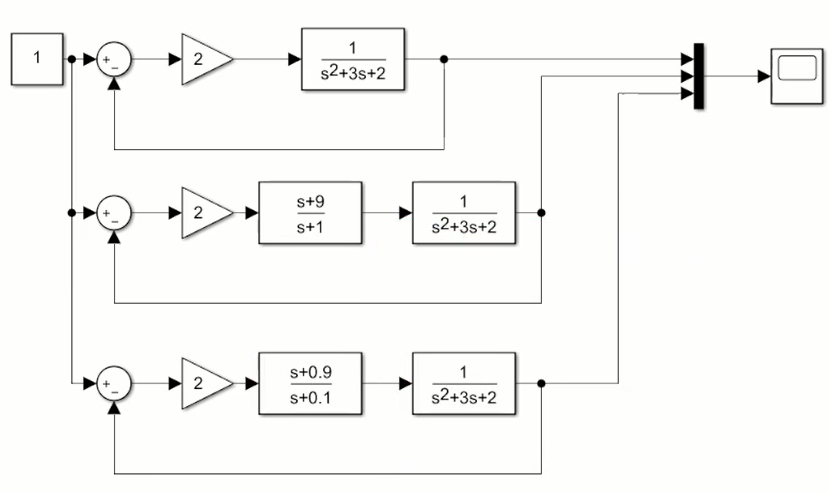
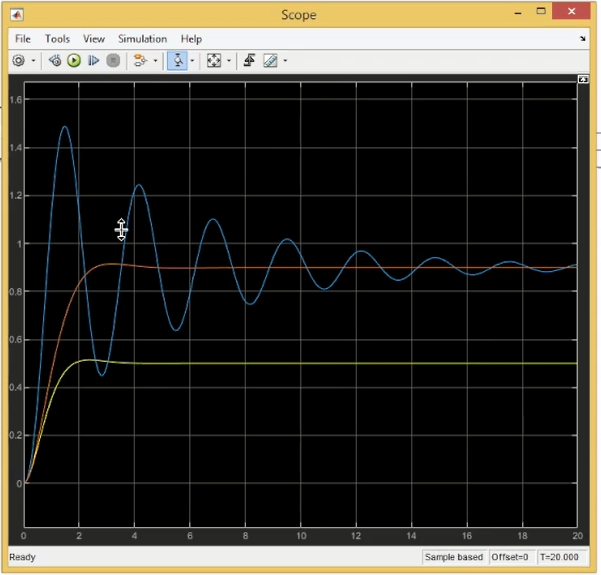
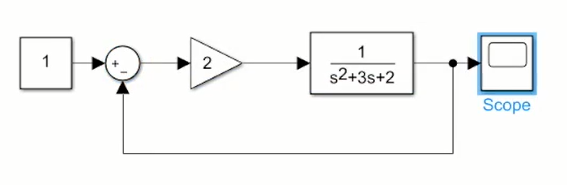
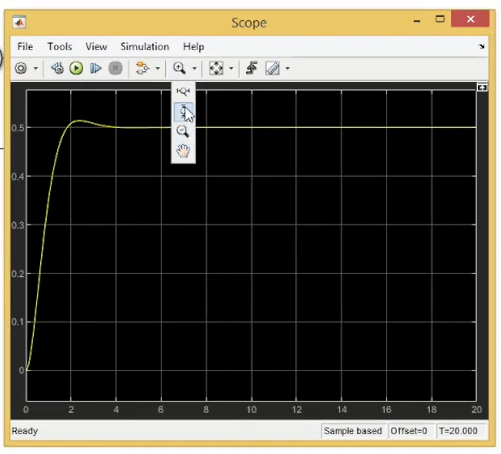
其中黄线是没有滞后补偿器的,蓝线是滞后补偿器中p = 1 ,q = 9的曲线,橙红县是p = 0.1 ,q = 0.9的曲线,上面可以看出加入滞后补偿器的系统稳态误差较小,并且橙红和蓝线最终稳定值相同但是到达稳定值的速度不同,原因就是橙红线的p和q对系统根轨迹的影响不大
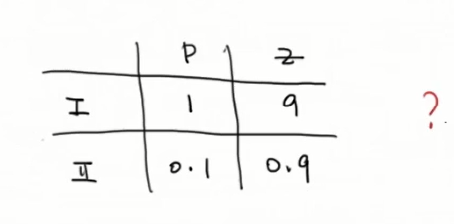
当p=0.1,z=0.9时,相位图中根轨迹分析,不会对原有的根轨迹造成大的影响
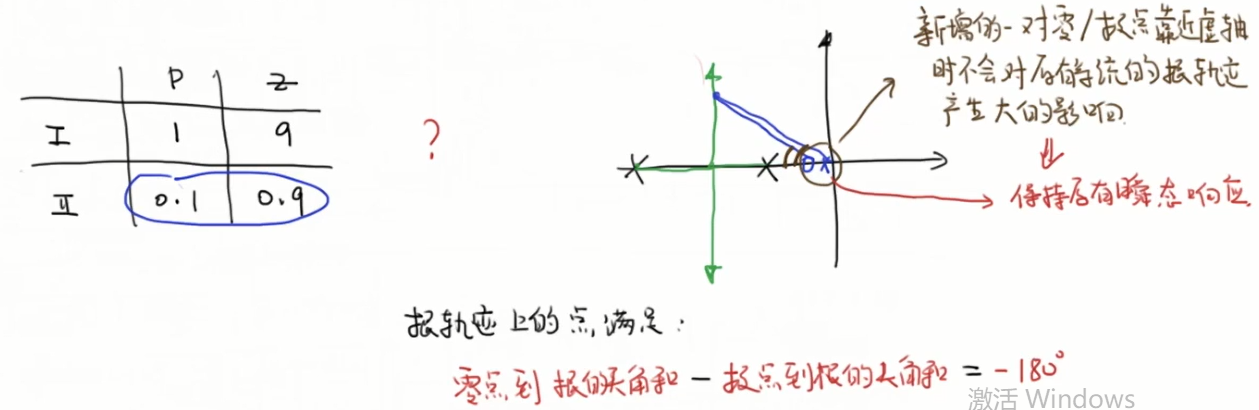
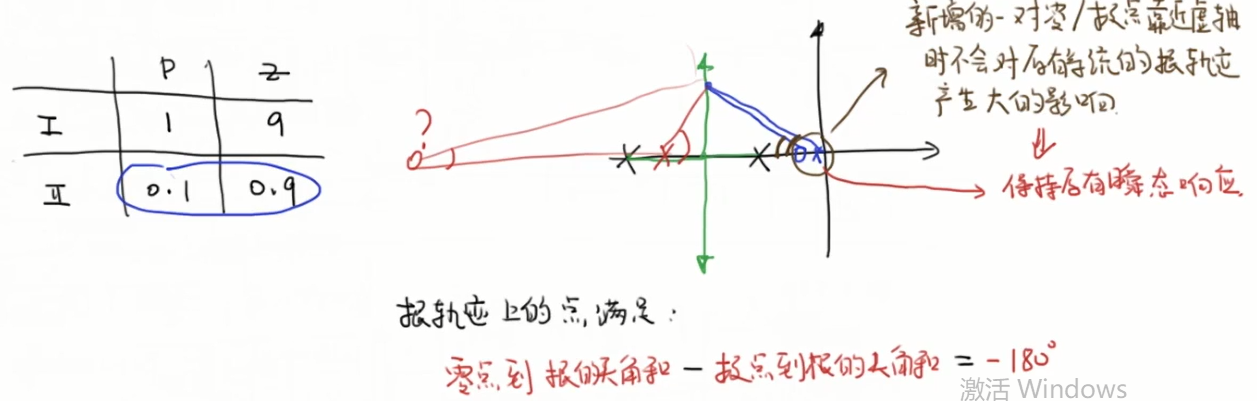
当p=1,z=9时,相位图中根轨迹分析,会对原有的根轨迹造成大的影响
我们向往远方,却忽略了此刻的美丽

 浙公网安备 33010602011771号
浙公网安备 33010602011771号