线性系统非线性系统的自我理解
线性系统
什么是线性系统
线形指量与量之间按比例、成直线的关系,在空间和时间上代表规则和光滑的运动;
如何判断一个系统是线性系统还是非线性系统(实际中的问题都是非线性)
以状态方程来说明
线性时变系统系数矩阵不随时间变化
线性是不变系统系数矩阵不随时间变化即为常数矩阵
线性时变系统  式1.1
式1.1
线性非时变系统  式1.2
式1.2
可以化成上面两种情况的,就是线性系统
举一个有意思的例子
y=kx+b是不是线性的
如果将x看成变量,按照叠加原理,
<1>x1、x2是方程的解,即y1 = k*x1 +b;y2 = k*x2 +b
<2>假设x3=x1 + x2;
<3>带入方程 y3 = k*(x1 + x2) +b = k*x1 + k*x2 +b;
<4>验证如果满足叠加原理则y1 + y2 = y3; 明显并不满足y1 + y2 比 y3多一个常量b
故此方程不算是线性;
但是你如果定义x'=[x;b],定义k’= [k, 1],那么方程就变成y=k’* x'; 根据上面几步很容易判断此方程是线性的。
其实 将x作为单独变量也不满足叠加原理,和y=kx+b的情况差不多,如果将方程写作
将x作为单独变量也不满足叠加原理,和y=kx+b的情况差不多,如果将方程写作 定义X’=[x,u],K’=[A;B],再看这个方程这不就满足叠加原理了吗。
定义X’=[x,u],K’=[A;B],再看这个方程这不就满足叠加原理了吗。
所以再看一个系统是不是线性系统时,首先看哪些作为状态变量X,哪些作为控制量U,之后看是不是能化成式1.1和式1.2的形式,可以化成就是线性系统。
在无人驾驶模型预测控制书中
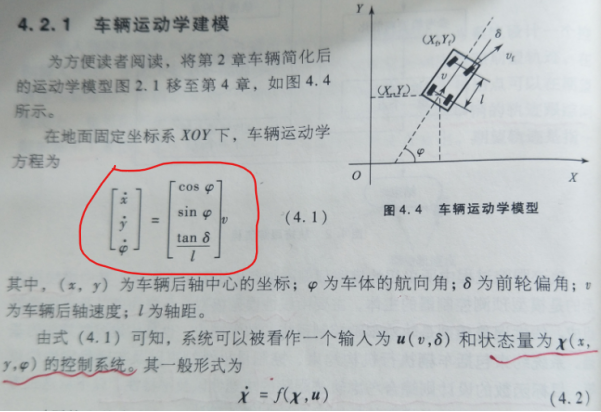
问公式4.1是不是线性系统;直接什么条件也没给这个是不能判断的;
说明两种情况
(1)将 ,那个
,那个 列矩阵看成时变的系数矩阵B(t),所以方程就变成
列矩阵看成时变的系数矩阵B(t),所以方程就变成 ,你看这是不是满足叠加原理呢
,你看这是不是满足叠加原理呢
(2)如果以书上的输入量 ,状态变量
,状态变量 ,是化不成公式1.1或者1.2在这种形式的,应为deta在tan里面。
,是化不成公式1.1或者1.2在这种形式的,应为deta在tan里面。
所以在判断一个系统是不是线性时,应该首先明确我们要研究这个系统的那些量,那些作为状态量X,那些作为控制量U,应为选取量的不同最终判断结果也不同
线性系统的特征
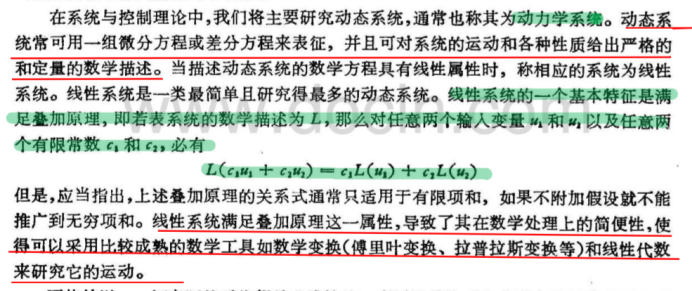
线性系统满足叠加原理
线性系统的优点
稳定性容易判断
1、已传递函数形式来说,可以通过极点分布情况判断系统稳定性,极点分布在s平面的左侧系统稳定
2、以状态方程的形式来说,状态变的系数矩阵的特征值全小于0,系统稳定
线性系统的模型容易算的控制量
比如通过状态反馈来找到合适的控制量U(可以通过系数矩阵特征值来判断U是否能让系统稳定)
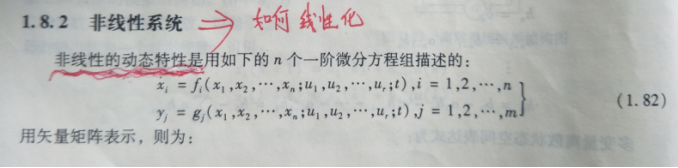
非线性系统
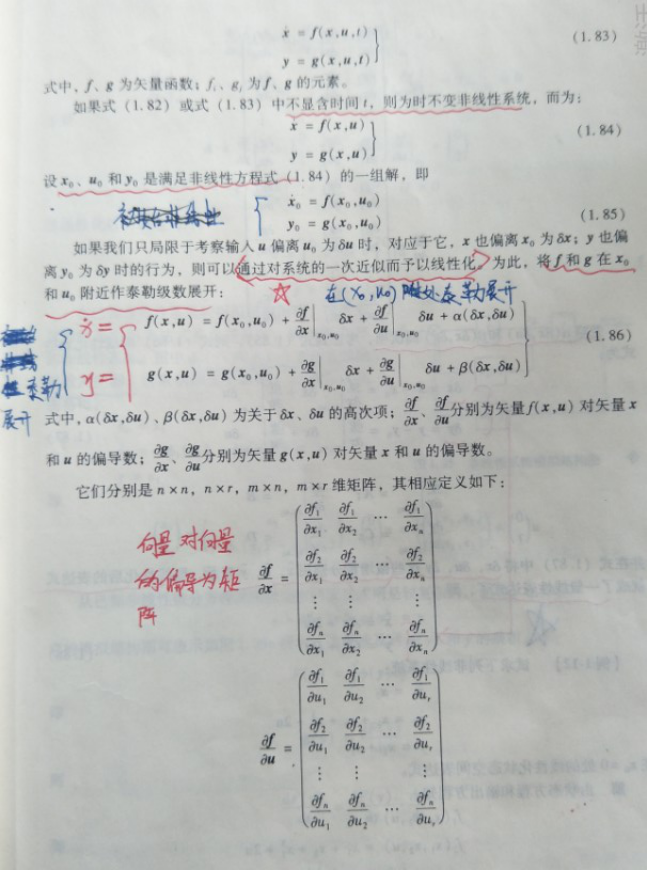
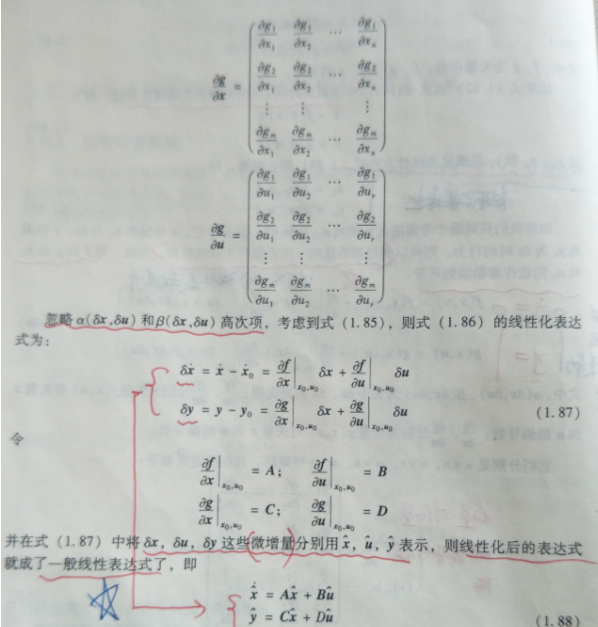
非线性系统不是很好研究,判断稳定性时可以用李雅普诺夫方法进行判断,但是不如线性系统容易,线性系统研究更加容易,所以需要用一种方法将非线性进行线性化;这就要说到高数中的泰勒公式
线性化的限制


 浙公网安备 33010602011771号
浙公网安备 33010602011771号