定常系统(时不变系统)和时变系统&& 动态系统和静态系统
根据系统是否含有参数随时间变化的元件,自动控制系统可分为时变系统与定常系统两大类。
定常系统又称为时不变系统,其特点是:系统的自身性质(所研究物体的本质属性例如:质量、转动惯量等)不随时间而变化。具体而言,系统响应的性态只取决于输入信号的性态和系统的特性,而与输入信号施加的时刻无关,即若输入u(t)产生输出y(t),则当输入延时τ后施加于系统,u(t-τ)产生的输出为y(t-τ)。
定常系统又称为时不变系统
即:系统的自身性质不随时间而变化。具体而言,系统响应的性态只取决于输入信号的性态和系统的特性,而与输入信号施加的时刻无关。也就是说我t1时输入u,输出为y,那我t2时刻输入u,输出值还为y
时变系统
其中一或一个以上的参数值随时间而变化,从而整个特性也随时间而变化的系统。
火箭是时变系统的一个典型例子,在飞行中它的质量会由于燃料的消耗而随时间减少;另一个常见的例子是机械手,在运动时其各关节绕相应轴的转动惯量是以时间为自变量的一个复杂函数。
时不变系统是输出不会直接随着时间变化的系统。
 产生输出y(t),那么对于任意时间延迟的输入
产生输出y(t),那么对于任意时间延迟的输入 将得到相同时间延迟的输出
将得到相同时间延迟的输出  。
。

数学分析:
假定某个系统的输入为u(t),相应的输出为y(t)。
当输入经过τ的延时后,即输入为u(t-τ)时,若输出也相应地延时τ,即输出y(t-τ),那么这个系统即为定常系统。
即当输入信号u(t)先进行时移τ为u(t-τ),再进行系统变换H[▪]得到的值H[u(t-τ)];
说白了就是一个系统从初始时刻运行一段时间T,这段时间的输入输出有一段相应的轨迹线。
如果将这个系统的T时刻的状态以初始时刻的重新运行一段时间T时,输入从初始时刻变化形式与之前一样,看看输出是不是与之前的一样
(比如以火箭举例输入指的是推射的能量,输出指的是加速度;
第一次火箭以正常的情况发射,运行T时间时,输入能量、加速度与时间能绘制出一个三维曲线Q1;
第二次火箭以第一次时T时刻的状态发射,运行T时间时(输入能量随时间的变化与第一次一样),这时输入能量、加速度输出、以及时间变化绘制另一个三维曲线Q2,Q1和Q2这两个曲线在输出加速度上是不重合的(肯定会变化,因为T时刻的质量变小了))
与输入信号u(t)先进行系统变换H[▪]得到y(t),再进行时移得到的值y(t-τ)相等,即H[u(t-τ)]=y(t-τ)。
如:
1.判断系统y(t)=cos[u(t)],t>0是否为时不变系统:
1).输入信号u(t),先进行时移为u(t-τ),再进行系统变换得到的值为cos[u(t-τ)],t>0;
2).输入信号u(t),先进行系统变换为cos[u(t)],再进行时移得到的值为cos[u(t-τ)],t>0;
两者相等,所以该系统为时不变系统。
2.判断系统y(t)=u(t)▪cost是否为时不变系统:
1).输入信号u(t),先进行时移为u(t-τ),再进行系统变换得到的值为u(t-τ)▪cost,t>0;
2).输入信号u(t),先进行系统变换为u(t)▪cost,再进行时移得到的值为u(t-τ)▪cos(t-τ),t>0;
u(t-τ)▪cost≠u(t-τ)▪cos(t-τ),所以该系统为时变系统

最终看的是两种路径最终图像(即右下角的图像)是否重合
注意:上面的分析方法也可以用我说的方法检验是否为定常系统,即:假设t1时输入u,输出为y,看t2时刻输入u,输出值是否还为y即可
动态系统和静态系统
静态系统与时间无关,当前的输入即确定当前的输出,具有瞬态性;动态系统与时间有关,对于一般因果系统,当前的输入不仅取决于当前的输入,还与系统过去时刻的状态(输入和输出)有关。
1.1动态系统的定义
在很多领域都有关于"系统"这个概念,系统往往描述了一个比较复杂的关系的总和,而我们要想很好控制这个系统,就需要先了解它。控制理论研究的是更加广义的系统,把一个系统先当作黑箱,那么这个黑箱和外界的交互关系,就对应了有不同时间的输入输出。
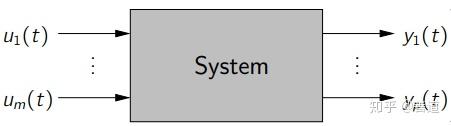 图1.1系统的输入输出
图1.1系统的输入输出
在t时刻,这m个会影响系统的输入量在控制理论里称为控制变量(Stellgrößen),而这p个系统输出的可以被传感器测量的量称为测量变量(Messgrößen)。现在我们做一些基本假设,限制一些条件,只研究连续时变的线性系统。而且系统的行为,即输出量,由描述系统的函数通过输入量,在时域上唯一确定。我们把系统的行为分为静态和动态两类。
用电路来举个例子, 现在是输出电压,
表示输入电流,那么电路系统有:
 图1.2 含阻电路和含容电路
图1.2 含阻电路和含容电路
例a:带电阻的电路
(1.1)
例b:带电容的电路
(1.2)
显然和不随时间变化的例a相比,例b里的初始条件 ,以及
在这个时间区间
内的变化决定了输出电压。系统的状态受过去影响,随时间变化。这样的系统被称为动态系统。

