关于欧几里得空间上的仿射变换的直观几何理解
最近做Nvidia AI city challenge track1遇到了一个calibration问题,感觉跟仿射映射有点关系,但是感觉线代基本都不怎么记得了Orz。。。。 于是复习了一下仿射映射有关知识,现整理于此。
知识均来自于xnh老师讲授。
首先列几个定义与定理,从而使我后文叙述方便:
-------------------------------------------------------------------------- --------------
定义1:设A是域K上的仿射空间,其关联的向量空间是V,称映射A——》K是仿射线性函数如果

其中Df属于V*是V上的线性函数。可称它是f是线性部分或微分。仿射空间上的常值函数是线性部分为0的仿射线性函数。
注意:我这篇文章里讨论的仿射空间都是欧几里得仿射空间。即关联的向量空间V是欧几里得向量空间,度量记为 。
定义2:双射f:E——>E称为E的保距映射如果它保持距离,即对任意p,q属于E,有

定理1:内积空间V上的线性算子A是保距的当且仅当它保持内积:
,从而当且仅当  。
。
定义3:欧氏空间上的线性算子A称为正交算子如果  。
。
( 在这里代表的是矩阵A的共轭转置,由于我们讨论的是欧氏空间,实际上就是矩阵A的转置,
在这里代表的是矩阵A的共轭转置,由于我们讨论的是欧氏空间,实际上就是矩阵A的转置, 是恒等变换)
是恒等变换)
定理2:映射f E-->E是运动,当且仅当,f是仿射变换且其线性部分是正交算子。
定理3:对任何的保距映射f,存在唯一确定的平面 (称之为保距映射f的轴)使得
(称之为保距映射f的轴)使得
(1) 且
且  是平移(可能是平凡的,即等于恒等变换,或
是平移(可能是平凡的,即等于恒等变换,或  是一个点)。
是一个点)。
(2)Df不固定任何  中的非零元。
中的非零元。
------------------------------数学语言与任氏猿语的分割线---------------------
-----------------------------精确严谨与胡言乱语的分割线-----------
一、一些理解
我觉得吧,一般的空间变换,其实分为两个部分,一个部分是平移(可以理解为移动坐标系的原点),对应f(p0),一个部分是伸缩旋转反射之类保持原点不动的变换----这部分实际上就是一个矩阵(注意零向量乘以一个矩阵肯定还是一个零向量,所以矩阵不可能移动原点)。
所谓的保距映射,是一种特殊情况,就是对于任意两个点,实施变换后两点的距离不变的映射,放在生活的中典型例子就是刚体运动,无论门怎么旋转,门上两块木头的距离不变,一个铁球管你怎么抛,无论它在天上怎么飞呀飞转啊转的,铁球内部两点间的距离可以认为是没有变化的。就是生活中所有很硬的没有弹性的东西的运动啦。反之,搓圆捏扁这种变换就不属于我这篇文章讨论的范畴。
由定理1,所有这样的保距映射的Df所对应的矩阵为正交矩阵,行列式为正负1.反过来也成立,当且仅当。
(注!:这个1大致上是指你所采取的单位制下的1,准确的说是仿射空间A所关联的向量空间V的基域K的单位元。。。mmp数学真的不讲人话)
为啥由定理1可以知道对应矩阵为正交矩阵,行列式为正负1呢?我一直觉着矩阵实际上就是代表着保持原点不动的n维空间变换,在保距的限制下,伸缩变换被排除了,那么这个矩阵代表的就是旋转与反射的复合。这个定理说的就是,一个保距的矩阵,先实施一次这个矩阵所代表的变换,再来一次这个矩阵的转置代表的变换,可以变回来。比如 代表顺时针旋转
代表顺时针旋转  ,这个矩阵的转置
,这个矩阵的转置  代表逆时针旋转
代表逆时针旋转 ,显然它们的合成是不变。
,显然它们的合成是不变。
又一个矩阵的行列式跟它的转置矩阵的行列式相等,于是A的行列式的平方等于1,得到解为正负1.
其次关注一下所谓的轴。我理解里实质就是特征值为1的特征子空间。在生活中的典型例子应该是转轴,这里仿射几何定义的轴就是在保距映射f的变换下不变的n维空间,广义上的轴。它可以是个点,是条直线,是个三维空间,或更高维的空间。
顺便提一下,三维欧几里得空间的刚体运动如果有不动点,那一定是旋转,旋转轴是由运动的不动点形成的直线,而且,任何物体的移动都可以通过先沿着一个方向平移,后绕某条直线旋转来实现,也可以先旋转,后平移。
二、三维欧几里得空间下的保距映射
我们可以用轴来分析一下三维欧几里得空间的保距映射。
保距映射 f可表示为 O为原来的原点,o+v为新原点,这部分是平移。设F的矩阵为A。
O为原来的原点,o+v为新原点,这部分是平移。设F的矩阵为A。
前面已经说明了,A必然是一个正交矩阵,行列式为1,n*n的正交矩阵虽然未必能对角化,但是可以化成标准形式:
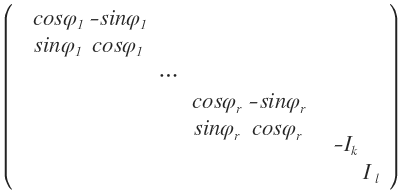

(I代表的是单位矩阵, 就是一个l*l,对角线上全是1的矩阵)
就是一个l*l,对角线上全是1的矩阵)
因为轴就是特征值为1的特征子空间,所以轴的维数就是A的标准形式中l的数量。也即(A-E)X=0的解空间的维数。
以轴的维数为分类标准我们可以分类讨论一下三维欧几里得空间下f可能表示的变换:
若轴的维数为3,即l=3,那么A对空间是一个恒等变换,f是一个将原点从o移动到o+v的平移。
若轴的维数为2,即l=2,,这时剩下的一个位置只可能是一个-1,所以轴是一个平面,f是通过这个平面的反射,或是一个滑动反射,即过这个平面的反射和一个平移的合成。
若轴的维数为1,即l=1,剩下两个位置是 ,这时轴是一条直线,f是绕直线的旋转,f是螺旋运动(一个绕直线的旋转与一个平移的合成)
若轴的维数为0,即l=0,这时轴是一个点,剩下三个位置可以是一个 和一个-1,这时f是镜像旋转,即绕一条直线的旋转与过一个平面的反射的合成,这个平面和这条直线垂直且交于轴点。
三、欧几里得空间上的仿射变换直观的几何意义
定理:欧几里得空间(E,V)的仿射变换f是四个变换的合成:
- 平移
- 绕某个点o的旋转
- 以o为原点的一个直角坐标系的各个轴方向做伸缩
- 一个过含o的平面的反射(如果这个仿射变换的Df的行列式为负)
证明:
首先仿射变换f可以分解为$f= t_vg$,其中$t_v$是一个平移,而g是一个保持某个点o不动的变换。
由极分解可知Dg可以分解为一个保距算子和一个正定算子的乘积(另开一帖证明),于是记Dg= DH ,其中D是保距的,H是正定的。
由于H是正定的,从而是自伴随的,在对应基下的矩阵是实对称的,实对称矩阵可对角化(另开一帖证明),从而在以o为原点的某个直角坐标系下有:
H$e_i$ = $lamdai ei$
此为在各个轴方向做伸缩。
保距算子D的几何意义在上一节中已经分析过了,虽然上一节中分析的是三维情况下的,但是高维情况下是类似的。
大致就是这样。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号