
【c++/c】反幂法求解绝对值最小的特征值
part 1:反幂法和LU分解
【反幂法】
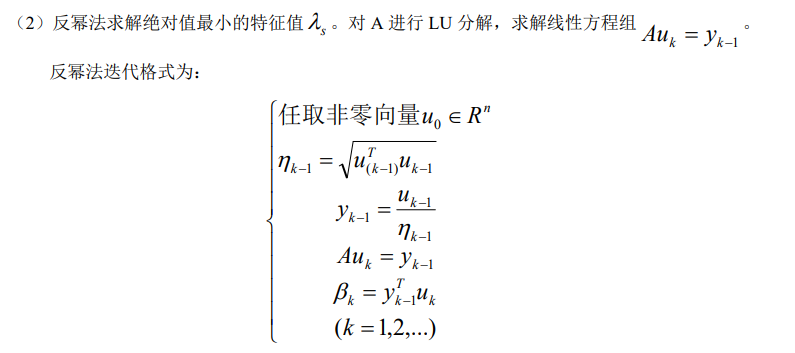
难点:对A进行LU分解。特别是程序编写过程中的下标。
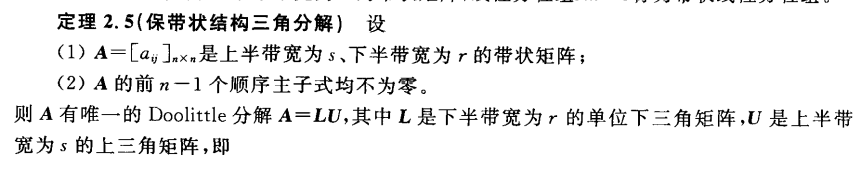
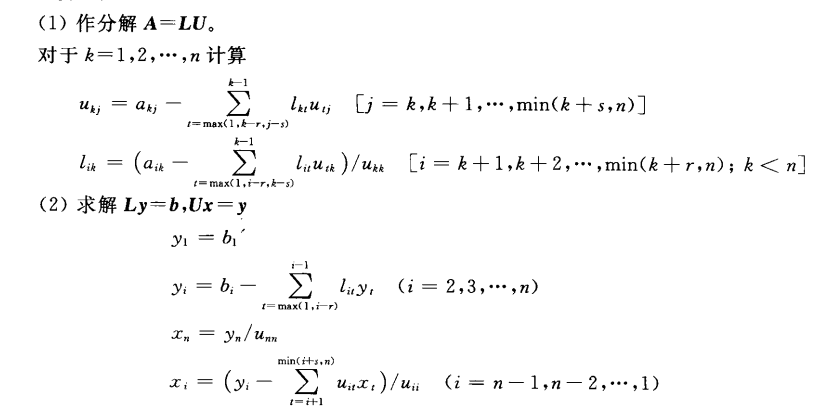
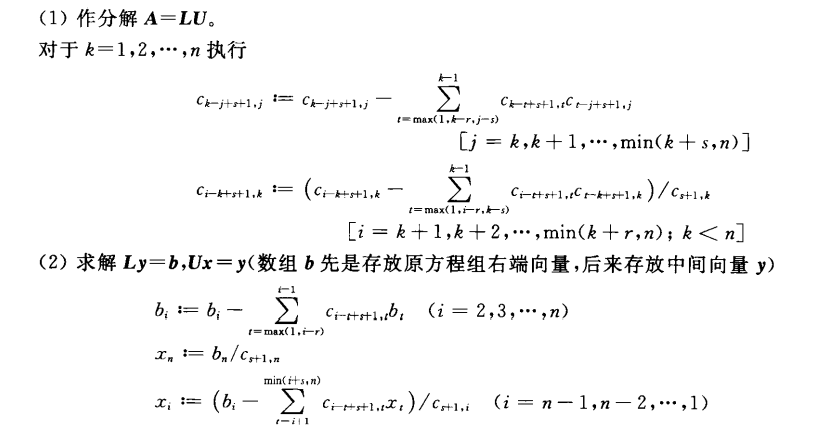
【doolittle 分解】
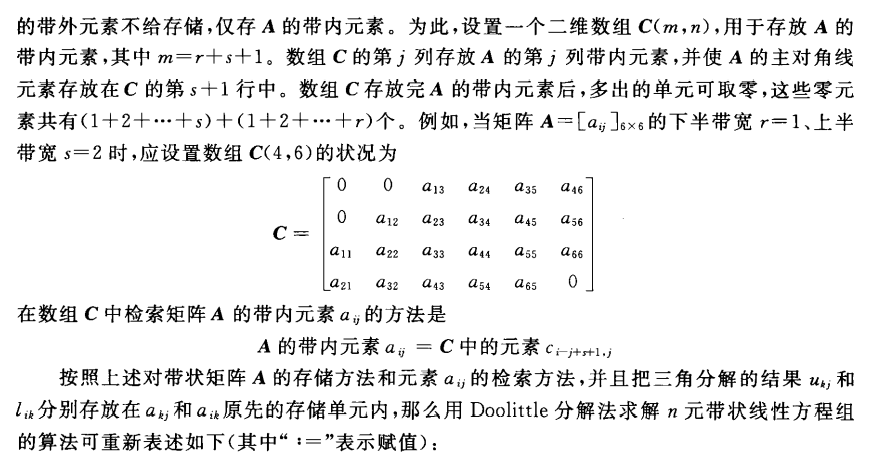
【A->C】
对于大型n元带状线性方程组Ax=b。当n>>r+s+1(A的总带宽)时,为了节省存储量,A的带外元素不给存储,仅存A的带内元素。
point 2 程序的实现
#include <iostream> #include <vector> #include <math.h> #include <cassert> #include <iomanip> using vec = std::vector<std::vector<double>>; using vecRow = std::vector<double>; /* 定义一些全局变量 g_r:矩阵A的下半带宽 g_s:矩阵A的上半带宽 g_time:迭代的最大次数,超出此数停止计算 g_err:给定误差 */ int g_r{ 2 }; int g_s{ 2 }; int g_time{ 5000 }; double g_err{ 10e-12 };
/* 求a,b中的最小值 */ int min(int a, int b) { return (a < b) ? a : b; } /* 求最大值的函数重载 */ int max(int a, int b, int c) { int max1{}; (a > b) ? max1 = a : max1 = b; (max1 > c) ? max1 = max1 : max1 = c; return max1; } /* 本题需要对int ,double两种类型的数进行处理 因此使用了功能模板 */ template <typename T> T max(T a, T b) { return (a > b) ? a : b; }
/* 将矩阵A变为零矩阵 */ vec changeZero(vec A) { int row{ static_cast<int> (A.size()) }; int col{ static_cast<int>(A[0].size()) }; for (int i = 0;i!=row;++i) { for (int j = 0;j != col;++j) { A[i][j] = 0.0; } } return A; } /* 将向量A变为零向量 */ vecRow changeZero(vecRow A) { int row{ static_cast<int> (A.size()) }; for (int i = 0;i < row;++i) { A[i] = 0; } return A; }
【将A矩阵变化为C矩阵】
vec createC(vec A) { int row{ static_cast<int> (A.size()) }; int col{ static_cast<int>(A[0].size()) }; int m{ g_r + g_s + 1 }; //5 int n{ col }; //501 vec C(m, vecRow(n)); C = changeZero(C); int temp{}; int start{}; int end{}; int mid{ g_s + 1 };//3 int i{};// A矩阵的行 int k{};// C矩阵的行 for (int j = 0;j < n;j++) { //j为A\C矩阵的列 if (j < mid - 1) { start = mid - j - 1;//实际矩阵存放位置需要减去1 end = m - start; i = 0; k = start; while ((k < m) && (i < end)) { C[k][j] = A[i][j]; ++i; ++k; } } else if (j >= mid - 1 && j < n - g_r) { start = j - g_s; end = j + g_r + 1; i = start; k = 0; while ((i < end) && (k < m)) { C[k][j] = A[i][j]; ++i; ++k; } } else if (j >= n - g_r) { start = j - g_r; end = n - start + 1; i = start; k = 0; while ((i < n) && (k < end)) { C[k][j] = A[i][j]; ++i; ++k; } } else { continue; } } return C; }
【将C矩阵进行LU分解】
//Doolittle 分解法 LU分解 vec dooLittleLU(vec C) { int row{ static_cast<int> (C.size()) }; int col{ static_cast<int>(C[0].size()) }; int m{ g_r + g_s + 1 }; int n{ col }; vecRow u(col); // LU分解,A->C //对于k=1,2,...,n计算 int min1{}; double sum{}; int t0{}; for (int k = 0;k < n;++k) { min1 = min((k + g_s), n - 1); //n需要-1,而k已经比原来小1了 for (int j = k;j < min1 + 1;++j) { t0 = max(1 - 1, k - g_r, j - g_s); //t0 = (k > 2) * (k >= j) * (k - 2) + (j > 2) * (j > k) * (j - 2); for (int t = t0;t < k;++t) { //C[k - j + g_s + 1][j] = C[k - j + g_s + 1][j] - C[k - t + g_s + 1][t] * C[t - j + g_s + 1][j]; //注意下标的转换,比公式上小1,因为从k=0开始计数 C[k - j + g_s + 1 - 1][j] -= C[k - t + g_s + 1 - 1][t] * C[t - j + g_s + 1 - 1][j]; } } if (k < n - 1) { min1 = min(k + g_r, n - 1); for (int i = k + 1;i < min1 + 1;++i) { //t0 = (k > 2) * (k >= i) * (k - 2) + (i > 2) * (i > k) * (i - 2); t0 = max(0, i - g_r, k - g_s); //sum = 0; for (int t = t0;t < k;++t) { // std::cout << "mid: " << i - k + g_s + 1 - 1 << '\n'; // sum += C[i - t + g_s + 1][t] * C[t - k + g_s + 1][k]; C[i - k + g_s + 1 - 1][k] -= C[i - t + g_s + 1 - 1][t] * C[t - k + g_s + 1 - 1][k]; } C[i - k + g_s + 1 - 1][k] = C[i - k + g_s + 1 - 1][k] / C[g_s + 1 - 1][k]; } } } return C; //求解 }
【C矩阵回代,解方程】
vecRow dooLittleSolve(vec C, vecRow uk) { int row{ static_cast<int> (uk.size()) }; int n{ row }; int t0{}; double min1{}; for (int i = 2 - 1;i < row + 1 - 1;++i) { t0 = static_cast<int>(max(1 - 1, i - g_r)); for (int t = t0;t < i - 1 + 1;++t) { uk[i] -= C[i - t + g_s + 1 - 1][t] * uk[t]; } } uk[n - 1] = uk[n - 1] / C[g_s + 1 - 1][n - 1]; for (int i = n - 1 - 1;i >= 0;--i) { min1 = min(i + g_s, n-1); for (int t = i + 1;t < min1 + 1;++t) { uk[i] -= C[i - t + g_s + 1 - 1][t] * uk[t]; } uk[i] /= C[g_s + 1 - 1][i]; } return uk; }
【反幂法迭代求解】
double inverseMi(vec A, vecRow u0) { int row{ static_cast<int> (u0.size()) }; vecRow y(row); vecRow uk(row); int m{ g_r + g_s + 1 }; int n{ row }; vec C(m, vecRow(n)); double betak{}; double beta0{}; int t0{}; double sum{}; double min1{}; C = createC(A); C = dooLittleLU(C); //LU分解 //std::cout << "beta: " << betak << '\n'; int k{ 1 }; double distance{}; while (k) { beta0 = betak; y = normalize(u0); // C = dooLittleLU(A); //LU分解 uk = y; uk = dooLittleSolve(C, y); betak = 1 / multi(y, uk); distance = fabs((betak - beta0) / betak); if (distance <= g_err) { return betak; } if (k > g_time) { std::cout << "out of g_time" << '\n'; return 0; } //std::cout << "step: " << k << '\n'; u0 = uk; k++; } //return u; return betak; }
betak即为所求绝对值最小的特征值。
