第十四届"恩智浦"杯室内对弈组部分优秀车模底盘使用情况
版权声明:本文为博主原创文章,转载请标明出处: https://www.cnblogs.com/zhihan/p/12269124.html
在恩智浦杯第14届室内对弈组中表现优秀的四支队伍有:北华大学、哈尔滨工业大学、华中科技大学、华南理工大学,本文针对这四支队伍的车模机械结构进行了分析和比较。由于本博客没有插入视频的js权限,为方便读者在阅读本文时对照比赛录像,这四支队伍的比赛录像已上传至bilibili: https://www.bilibili.com/video/av84267457/
目录:
北华大学
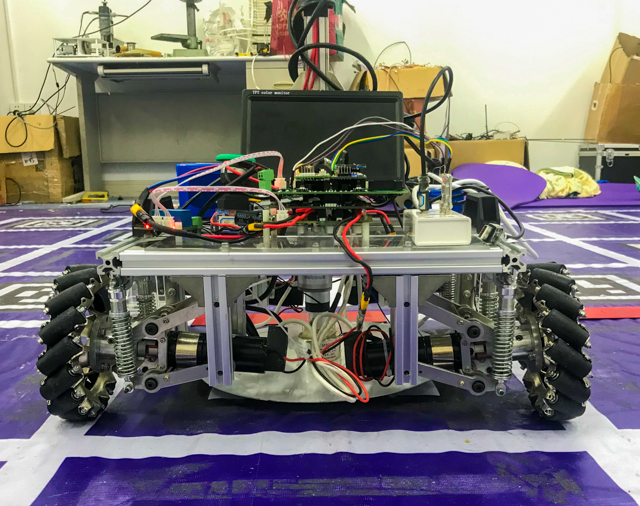
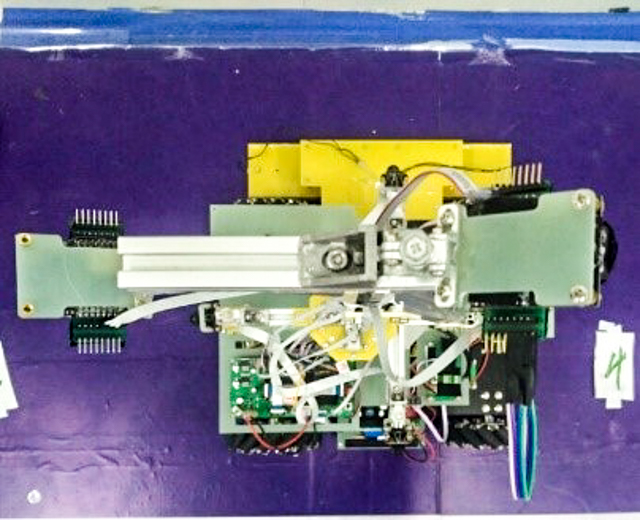
车模为无悬挂的麦克纳姆轮全向移动平台,采用铝型材搭建方形车框,轮胎使用的应该是大疆ROBOMASTER出厂的152mm麦克纳姆轮,电机不明,有类似于MD36配套的红色尼龙联轴器,从照片看隐约推断是MD36。轮胎与电机联接采用法兰盘加尼龙联轴器,缓冲电机负载。
底板位于车框下方贴近地面,用于载放电池和主板等,材料为有机玻璃。这种设计最大很大程度上降低了车辆的重心,减少车辆急启急停的摆动。[姑且称之为]桅杆固定在中间横向摆放的型材上,并在一侧使用另一根型材做三角形支撑,型材之间的连接为钢制外角件。
棋子抓取机构使用的5个12V电磁铁,总吸力为195kg,没有推拉机构;障碍抓取使用两边各一个电磁铁,吸力为15kg,这种结构节约了大量移动棋子的时间。电源部分应该是双电源供电,从图片来看至少使用了四块电池,其中两块用于驱动电机,另外两块用于驱动电磁铁。。
预赛表现中,此平台机动性能不错,爆发力和最高移动速度均属中等水平,但有超调的现象,而且平移过程中车体轻微摆动,停车位置不准需要时间纠正,可能和地面的摩擦力不够。不过即使是在需要大约10秒钟预扫描的情况下,预赛的最终成绩仍达到了35秒。
决赛表现中,此车对弈算法十分健壮,出现的失误极少,可以参考北华vs华科那一场比赛。
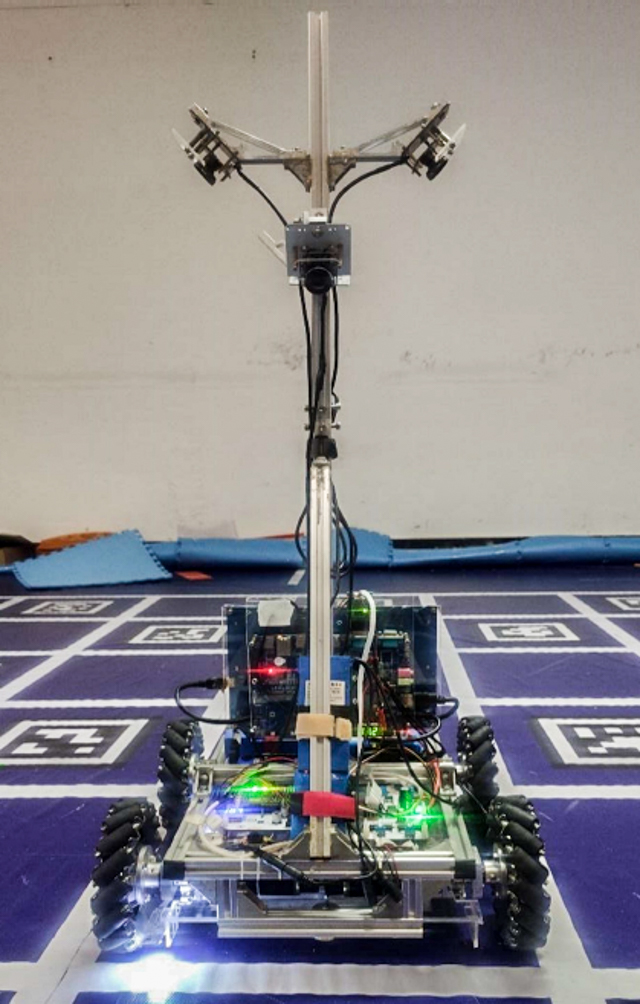
正面 两块电池用于电磁铁
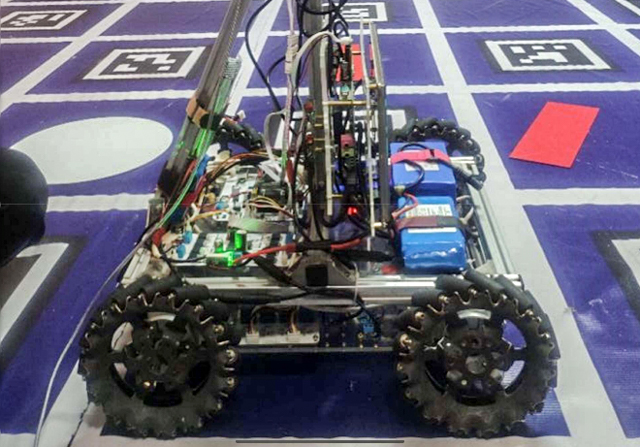
侧面,可以看到是大疆ROBOMASTER麦克纳姆轮
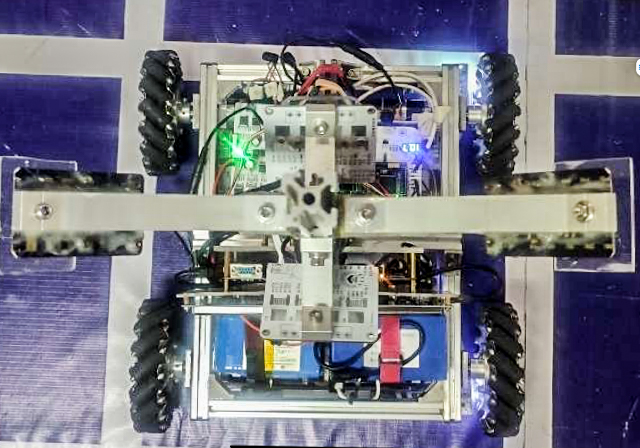
俯视 两块动力电池

棋子抓取机构是五个电磁铁
哈尔滨工业大学
车模偏重,车框为方形车框,中间有若干横杆用于加固支撑,车框平面高于轮胎,下方为四轮独立悬挂,使用尼龙联轴器联接152mm大疆麦克纳姆轮,车轮相对竖直面略微倾斜,呈“内八字”形。
底板与车框处于同一平面,材料为有机玻璃,用于载放电源和主板等。这种底盘设计使得重心偏高,悬挂有消除高频振动的功能,却又增加了低频晃动,对图像获取可能不太友好,可能是悬挂偏软。针对图像抖动问题,他们使用数字低通/限幅滤波器过滤偏移量过大的坐标、采取两套图像定位方式进行互补滤波,另外降低了摄像头的高度。
电机据称是减速比27的MD36。抓取机构为一大两小电磁铁,大磁铁配合电推杆用于吸取棋子,小磁铁无推杆用于吸取障碍。巨大的推杆行程导致车体下方留有接近10cm的空间,重心偏高。
从预赛表现上看,此车机动性能很好,启停很快,匀速移动速度中等,抓取机构停顿很少,完成非常快。控制上比较顺滑,平移时车体摆动很小,定位准确,几乎没有超调的现象,预赛成绩是23秒。
决赛中失误较多,有些让人匪夷所思的走法。
正面
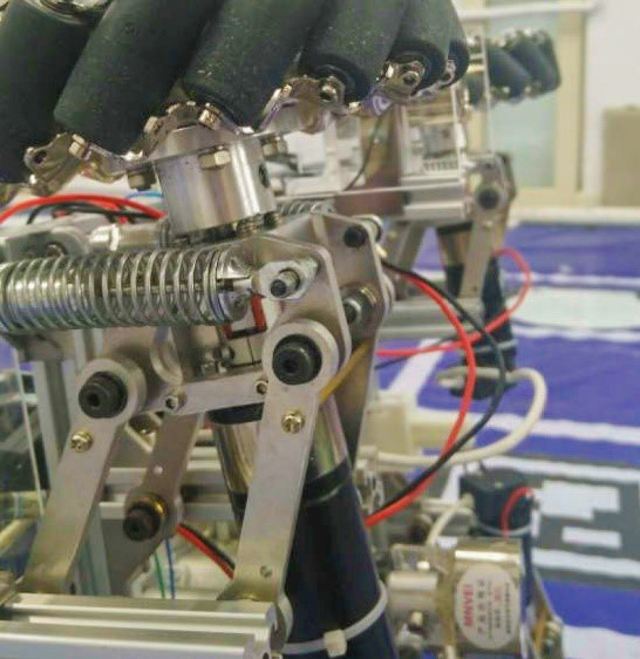
独立悬挂结构

底部,可以看到是MD36电机和大疆轮胎
华中科技大学
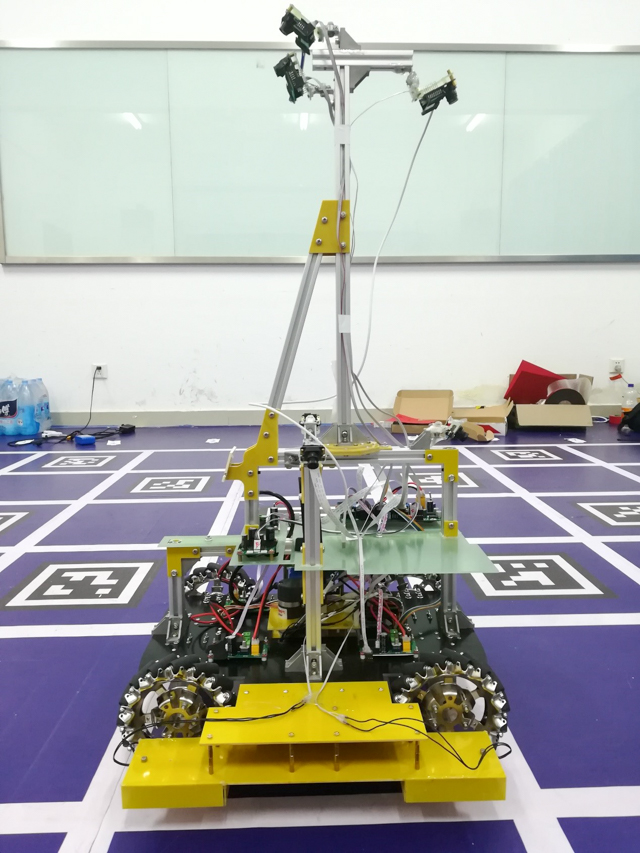
车模采用多层板结构,底板为5mm环氧板,其余板较薄,板与板间为铝型材固定形成笼状结构,型材与型材之间用环氧板做连接件,整车尺寸长宽高490*490*990mm,重量12kg,整车轻盈,但环氧板稍显脆弱。动力采用大疆RM35电机、ROBOMASTER麦克纳姆轮,连接方式为法兰直接连接,电机固定使用钢制“L”形钣金件,再在电机尾部用环氧板加强。
棋子抓取机构是一个由直线电机推拉的圆盘,圆盘上有三个电磁铁吸取棋子和三个轻触开关防止过动作。障碍放置机构为两个电磁铁,安装在车体一侧,并有限位措施,确保落点准确。电源只有一个24V的大型聚合物锂电池,安装于车体右侧。
预赛中,可以看出此车移动迅捷,即使在需要一次入场扫描的情况下,也取得了预赛24秒的成绩。此车启停并不很快,而最高速度较快,可能是RM35扭矩不够。控制上定位准确,略有超调。决赛中同样表现优异,能应对复杂棋局。
侧面1侧面障碍放置机构
侧面2 复杂的笼式结构
俯视
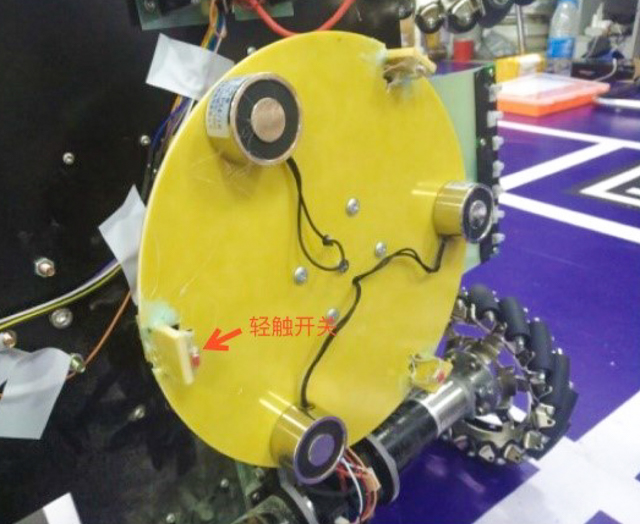
抓取机构:三个电磁铁配合三个轻触开关来防止过动作

大疆RM35电机法兰直接连接到ROBOMASTER麦克纳姆轮
华南理工大学
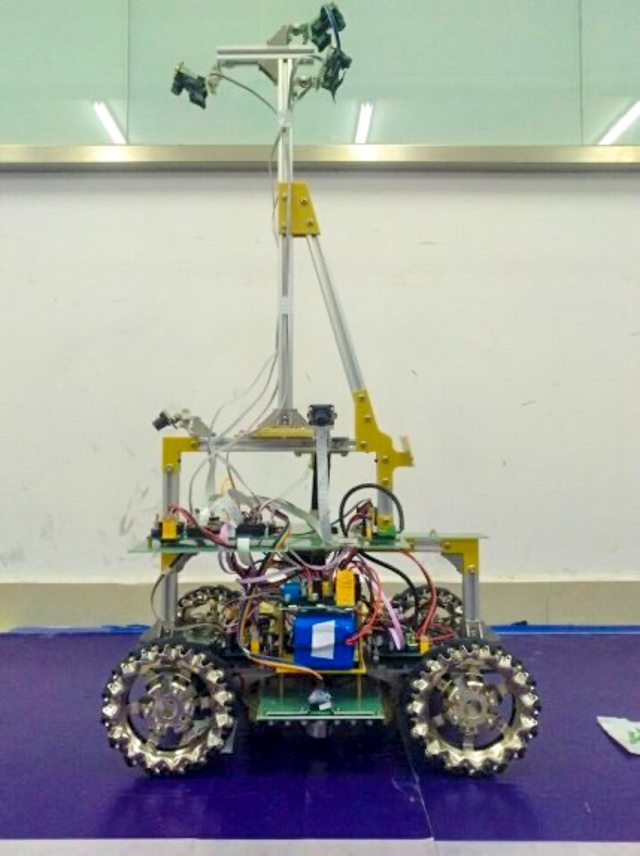
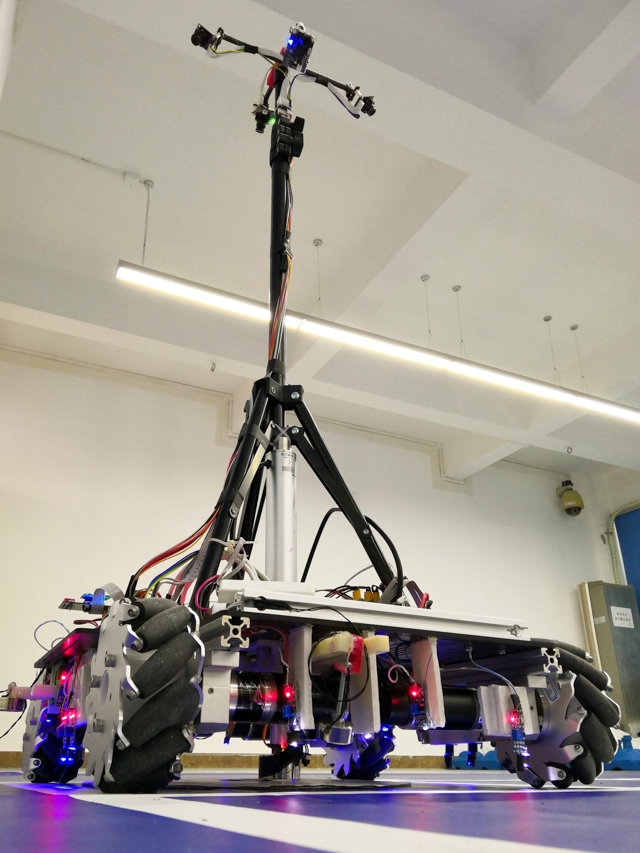
车模应该是成品平台,碳纤底板前后各贴合一根铝条,应当是加强作用。麦轮152mm,搭配行星减速电机,电机与轮胎为直接法兰连接,电机与底板连接为CNC加工铝件。电气元件分布在底板上。桅杆为三脚架形,顶部垂直分叉,比较稳定。
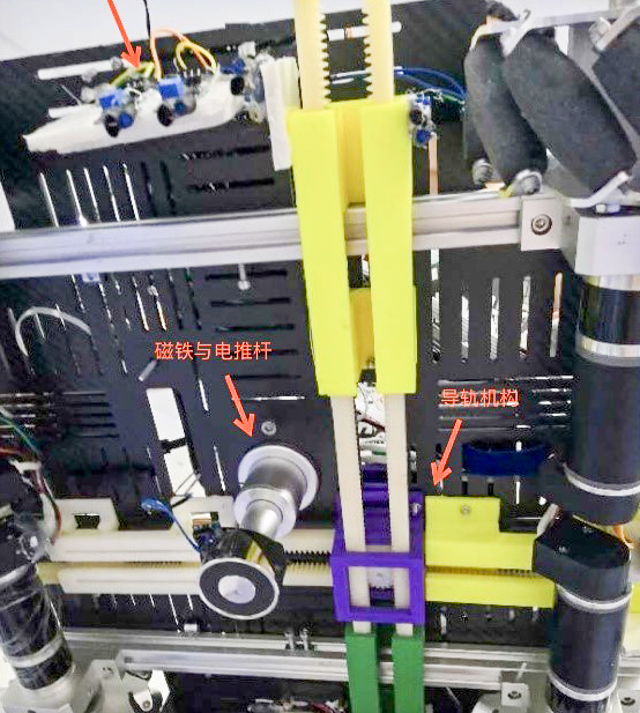
棋子抓取采用一个电推杠加上一个电磁铁的结构,没有反馈,在赛场上好像吸力还不够,无法抓起整个棋子,而经常半边在地上拖行,这是比较危险的。障碍放置机构比较复杂,大概是一个步进电机带动齿轮传动的导轨,可以同时实现四个障碍的摆放,实际在赛场上没有达到很准确的放置,可能和车体位置不准有关。由于照片较少,这部分且不展开。
车体结构本身应该是没有太大问题的。但从预赛的表现上来看,车辆移动速度和启停都还有提高的空间,控制上精度不够,需要来回多次调整。最终预赛成绩是38秒。最大的问题出在使用的电机上,减速箱回差超乎寻常的大,从录像也可以听到调整时有很大的撞齿的声音,这导致控制非常不准确,有时来回调整也无法摆正车体,甚至卡死。但总体来说,即使问题存在,而且是在需要较长时间的预扫描的前提下,这个最终成绩依然可观,说明控制算法是比较健壮的。决赛出现失误较多,当然许多队伍也还没有做好。

比赛截图

十字摄像头支架
抓取机构:单个磁铁加电推杆
总结
第十四届比赛的规则以完赛时间作为考量标准,这个前提决定了车模硬件方面要朝着更快、更好、更稳的方向努力。
1. 整车结构上,无悬挂的四麦克纳姆轮平台简单、稳定,所以仍然是主流设计,其中北华大学的设计很好的降低了整车重心,提高车体稳定性。底盘可以采用铝型材、碳纤维板或者环氧树脂板,没有使用钣金底盘的队伍;桅杆可以采用铝型材、碳纤管或者不锈钢管,固定件视材料而定。
2. 电机使用上,行星减速电机是主流选择。MD36系列的电机配套铝制电机支架、法兰和尼龙联轴器,使用方便;其中北华大学和哈尔滨工业大学依据车模重量选择了不同减速比的MD36电机,表现都十分不错;华中科技大学使用了大疆出厂的RM35电机,这款电机的特点是高转速、回程差小;华南理工大学的电机出现问题,回程差超乎寻常的大。
3. 麦克纳姆轮的选择上,北华大学、哈尔滨工业大学和华中科技大学均使用了大疆ROBOMASTER的产品。
4. 棋子拾放机构上,四校都使用了电磁铁方案,区别在于磁铁数量的多寡、带与不带推杆、有无位置传感器上,综合来看北华大学的五磁铁无推杆方案最为优秀。障碍放置机构的主流设计是单磁铁,华南理工大学队伍的四爪机构在实际操作过程中不是很稳定。
在设计车模的时候,要根据比赛的要求,适当选取零部件,借鉴优秀设计,优化车体结构,可以减少后续许多不必要的麻烦。
参考文献:
[1]14届优秀队伍技术报告 提取码:dcvt

 浙公网安备 33010602011771号
浙公网安备 33010602011771号