Offloading Monocular Visual Odometry with Edge Computing: Optimizing Image Quality in Multi-Robot Systems
写得很简短,没看到结论
用的VINS-MONO
测试在已有数据集上,实验的变量是,不同的图像质量
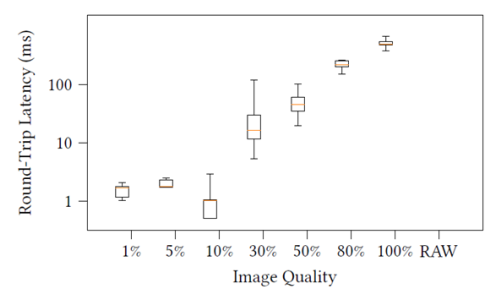
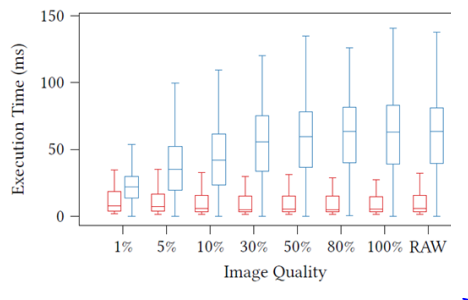
图像质量和传输时间,处理时间,和SLAM误差的关系。
就是说,图像压缩是可以放进来考虑的一件事情
写得很简短,没看到结论
用的VINS-MONO
测试在已有数据集上,实验的变量是,不同的图像质量
图像质量和传输时间,处理时间,和SLAM误差的关系。
就是说,图像压缩是可以放进来考虑的一件事情

 浙公网安备 33010602011771号
浙公网安备 33010602011771号