



Checkpoint 执行机制原理解析
在介绍 Checkpoint 的执行机制前,我们需要了解一下 state 的存储,因为 state 是 Checkpoint 进行持久化备份的主要角色。Checkpoint 作为 Flink 最基础也是最关键的容错机制,Checkpoint 快照机制很好地保证了 Flink 应用从异常状态恢复后的数据准确性。同时 Checkpoint 相关的 metrics(指标)也是诊断 Flink 应用健康状态最为重要的指标,成功且耗时较短的 Checkpoint 表明作业运行状况良好,没有异常或反压。然而,由于 Checkpoint 与反压的耦合,反压反过来也会作用于 Checkpoint,导致 Checkpoint 的种种问题。Flink 在 1.11 引入 Unaligned(未对齐) Checkpoint 来解耦 Checkpoint 机制与反压机制,优化高反压情况下的 Checkpoint 表现。
Statebackend 的分类
下图阐释了目前 Flink 内置的三类 state backend,其中 MemoryStateBackend 和 FsStateBackend 在运行时都是存储在 java heap中的,只有在执行Checkpoint时,FsStateBackend才会将数据以文件格式持久化到远程存储上。 而RocksDBStateBackend 则借用了 RocksDB(内存磁盘混合的 LSM DB)对 state进行存储。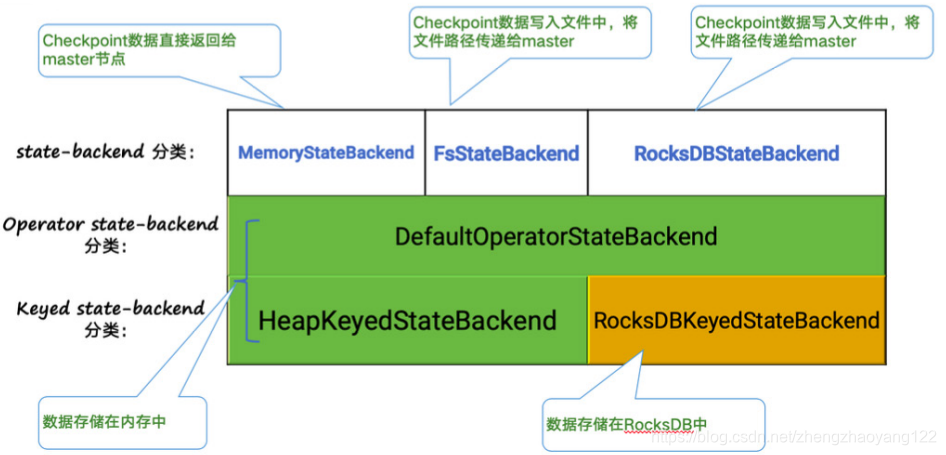
![]()
对于 HeapKeyedStateBackend,有两种实现:
【1】支持异步 Checkpoint(默认):存储格式 CopyOnWriteStateMap;
【2】仅支持同步 Checkpoint:存储格式 NestedStateMap;
特别在 MemoryStateBackend 内使用 HeapKeyedStateBackend 时,Checkpoint 序列化数据阶段默认有最大 5 MB 数据的限制。对于 RocksDBKeyedStateBackend,每个 state 都存储在一个单独的 column family 内,其中 keyGroup,Key 和 Namespace 进行序列化存储在 DB作为 key。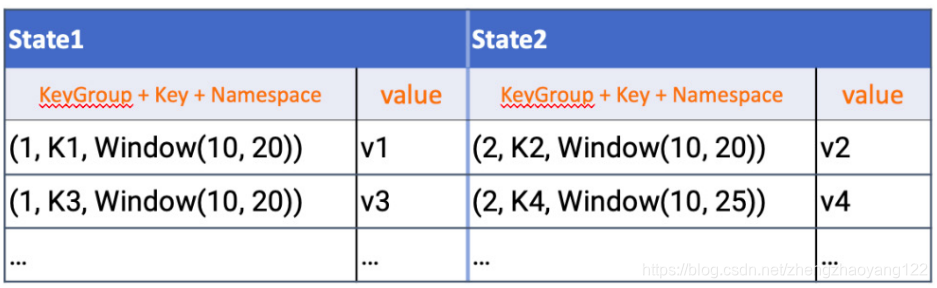
![]()
Checkpoint 执行机制详解
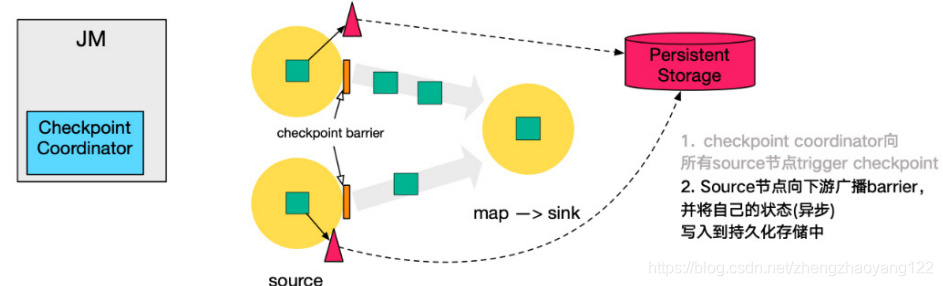
对 Checkpoint 的执行流程逐步拆解进行讲解,下图左侧是 Checkpoint Coordinator,是整个 Checkpoint 的发起者,中间是由两个 source,一个 sink 组成的 Flink 作业,最右侧的是持久化存储,在大部分用户场景中对应 HDFS。
![]()
【1】Checkpoint Coordinator 向所有 source 节点触发(trigger ) Checkpoint;
【2】source 节点向下游广播 barrier(分界线),这个 barrier 就是实现 Chandy-Lamport 分布式快照算法的核心,下游的 task 只有收到所有 input 的 barrier 才会执行相应的 Checkpoint。
Chandy-Lamport 算法将分布式系统抽象成 DAG(暂时不考虑有闭环的图),节点表示进程,边表示两个进程间通信的管道。分布式快照的目的是记录下整个系统的状态,即可以分为节点的状态(进程的状态)和边的状态(信道的状态,即传输中的数据)。因为系统状态是由输入的消息序列驱动变化的,我们可以将输入的消息序列分为多个较短的子序列,图的每个节点或边先后处理完某个子序列后,都会进入同一个稳定的全局统状态。利用这个特性,系统的进程和信道在子序列的边界点分别进行本地快照,即使各部分的快照时间点不同,最终也可以组合成一个有意义的全局快照。
从实现上看,Flink 通过在 DAG 数据源定时向数据流注入名为 Barrier 的特殊元素,将连续的数据流切分为多个有限序列,对应多个 Checkpoint 周期。每当接收到 Barrier,算子进行本地的 Checkpoint 快照,并在完成后异步上传本地快照,同时将 Barrier 以广播方式发送至下游。当某个 Checkpoint 的所有 Barrier 到达 DAG 末端且所有算子完成快照,则标志着全局快照的成功。
![]()
【3】当task 完成state 备份后,会将备份数据的地址(state handle)通知给 Checkpoint coordinator。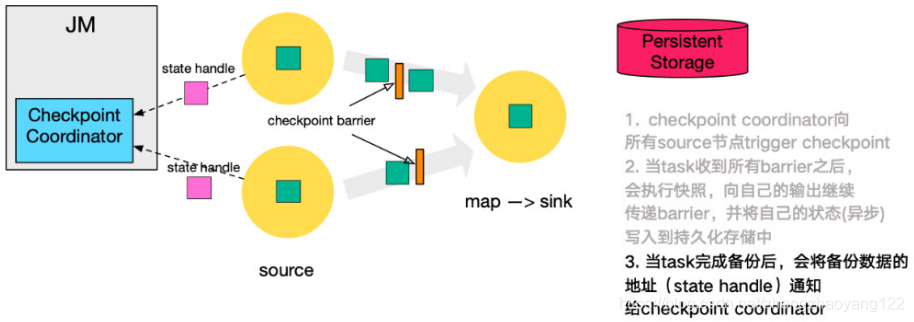
![]()
【4】下游的 sink 节点收集齐上游两个 input 的 barrier 之后,会执行本地快照,这里特地展示了 RocksDB incremental(增量) Checkpoint 的流程,首先 RocksDB 会全量刷数据到磁盘上(红色大三角表示),然后 Flink 框架会从中选择没有上传的文件进行持久化备份(紫色小三角)。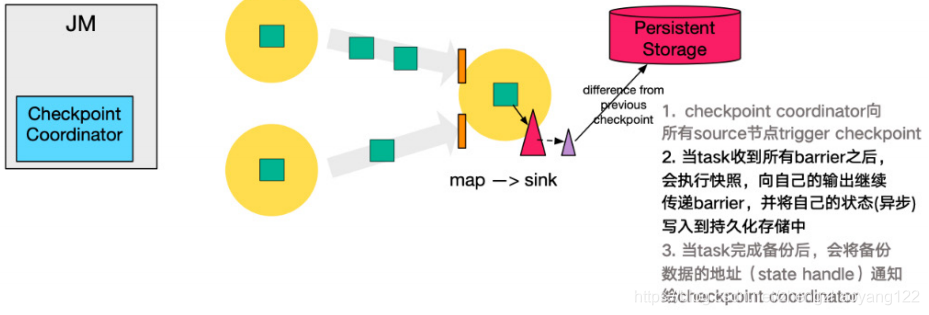
![]()
【5】同样的,sink 节点在完成自己的 Checkpoint 之后,会将 state handle 返回通知 Checkpoint Coordinator。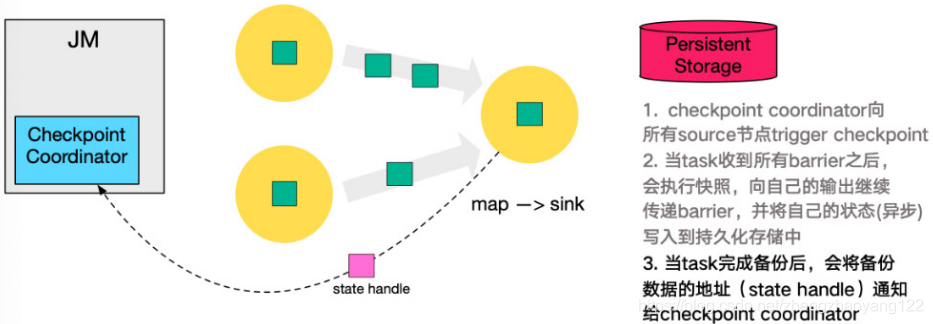
![]()
【6】最后,当 Checkpoint coordinator 收集齐所有 task 的 state handle,就认为这一次的 Checkpoint 全局完成了,向持久化存储中再备份一个 Checkpoint meta 文件。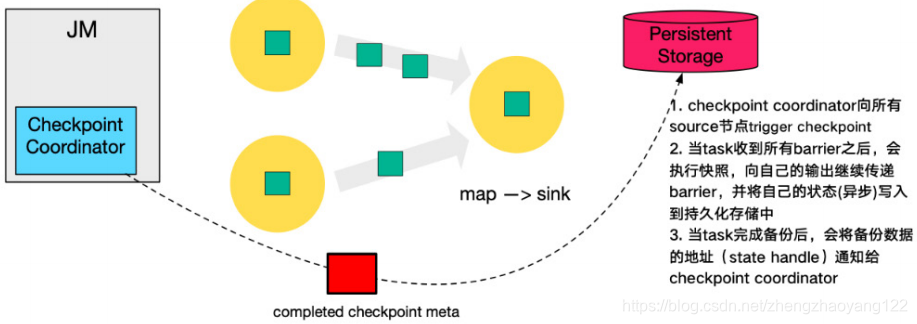
![]()
Checkpoint 的 EXACTLY_ONCE 语义
EXACTLY ONCE 语义:在有多个输入 Channel 的时候,为了数据准确性,算子会等待所有流的 Barrier 都到达之后才会开始本地的快照,这种机制被称为 Barrier对齐。在对齐的过程中,算子只会继续处理的来自未出现 Barrier Channel 的数据,而其余 Channel 的数据会被写入输入队列(Flink 通过一个 input buffer 将在对齐阶段收到的数据缓存起来),直至在队列满后被阻塞。当所有 Barrier 到达后(对齐),算子进行本地快照,输出 Barrier 到下游并恢复正常处理。
比起其他分布式快照,该算法的优势在于辅以 Copy-On-Write 技术的情况下不需要 “Stop The World” 影响应用吞吐量,同时基本不用持久化处理中的数据,只用保存进程的状态信息,大大减小了快照的大小。
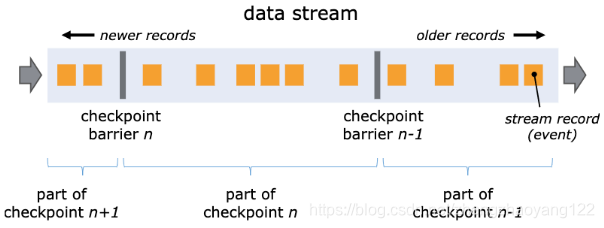
AT LEAST ONCE 语义:无需缓存收集到的数据,会对后续直接处理,所以导致 restore(恢复)时,数据可能会被多次处理。下图是官网文档里面就 Checkpoint align 的示意图:
![]()
需要特别注意的是,Flink 的 Checkpoint 机制只能保证 Flink 的计算过程可以做到 EXACTLY ONCE,端到端的 EXACTLY ONCE 需要 source 和 sink 支持。
Checkpoint 与反压的耦合
目前的 Checkpoint 算法在大多数情况下运行良好,然而当作业出现反压时,阻塞式的 Barrier 对齐反而会加剧作业的反压,甚至导致作业的不稳定。
首先, Chandy-Lamport 分布式快照的结束依赖于 Marker 的流动,而反压则会限制 Marker 的流动,导致快照的完成时间变长甚至超时。无论是哪种情况,都会导致 Checkpoint 的时间点落后于实际数据流较多。这时作业的计算进度是没有被持久化的,处于一个比较脆弱的状态,如果作业出于异常被动重启或者被用户主动重启,作业会回滚丢失一定的进度。如果 Checkpoint 连续超时且没有很好的监控,回滚丢失的进度可能高达一天以上,对于实时业务这通常是不可接受的。更糟糕的是,回滚后的作业落后的 Lag 更大,通常带来更大的反压,形成一个恶性循环。
其次,Barrier 对齐本身可能成为一个反压的源头,影响上游算子的效率,而这在某些情况下是不必要的。比如典型的情况是一个的作业读取多个 Source,分别进行不同的聚合计算,然后将计算完的结果分别写入不同的 Sink。通常来说,这些不同的 Sink 会复用公共的算子以减少重复计算,但并不希望不同 Source 间相互影响。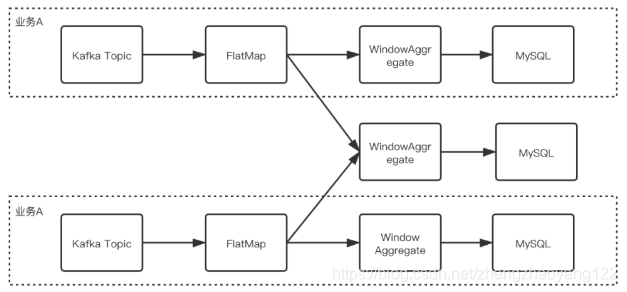
![]()
假设一个作业要分别统计 A 和 B 两个业务线的以天为粒度指标,同时还需要统计所有业务线以周为单位的指标,拓扑如上图所示。如果 B 业务线某天的业务量突涨,使得 Checkpoint Barrier 有延迟,那么会导致公用的 Window Aggregate 进行 Barrier 对齐,进而阻塞业务 A 的 FlatMap,最终令业务 A 的计算也出现延迟。
当然这种情况可以通过拆分作业等方式优化,但难免引入更多开发维护成本,而且更重要的是这本来就符合 Flink 用户常规的开发思路,应该在框架内尽量减小出现用户意料之外的行为的可能性。
Unaligned Checkpoint
为了解决这个问题,Flink 在 1.11 版本引入了 Unaligned Checkpoint 的特性。要理解 Unaligned Checkpoint 的原理,首先需要了解 Chandy-Lamport 论文中对于 Marker 处理规则的描述:自行百度翻译
1 Marker-Sending Rule for a Process p. For each channel c, incident on, and 2 directed away from p: 3 p sends one marker along c after p records its state and before p sends further messages 4 along c. 5 Marker-Receiving Rule for a Process q. On receiving a marker along a channel 6 C: 7 if q has not recorded its state then 8 begin q records its state; 9 q records the state c as the empty sequence 10 end 11 else q records the state of c as the sequence of messages received along c after q’s state 12 was recorded and before q received the marker along c.
其中关键是 if q has not recorded its state,也就是接收到 Marker 时算子是否已经进行过本地快照。一直以来 Flink 的 Aligned Checkpoint 通过 Barrier 对齐,将本地快照延迟至所有 Barrier 到达,因而这个条件是永真的,从而巧妙地避免了对算子输入队列的状态进行快照,但代价是比较不可控的 Checkpoint 时长和吞吐量的降低。实际上这和 Chandy-Lamport 算法是有一定出入的。举个例子,假设我们对两个数据流进行 equal-join,输出匹配上的元素。按照 Flink Aligned Checkpoint 的方式,系统的状态变化如下(图中不同颜色的元素代表属于不同的 Checkpoint 周期):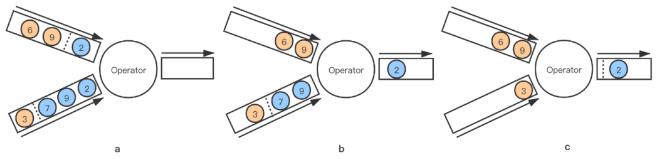
![]()
图 a:输入 Channel 1 存在 3 个元素,其中 2 在 Barrier 前面;Channel 2 存在 4 个元素,其中 2、9、7在 Barrier 前面。
图 b:算子分别读取 Channel 一个元素,输出 2。随后接收到 Channel 1 的 Barrier,停止处理 Channel 1 后续的数据,只处理 Channel 2 的数据。
图 c:算子再消费 2 个自 Channel 2 的元素,接收到 Barrier,开始本地快照并输出 Barrier。
对于相同的情况,Chandy-Lamport 算法的状态变化如下: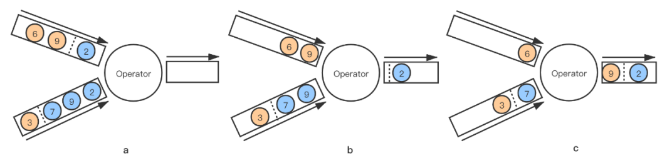
![]()
图 a:输入 Channel 1 存在 3 个元素,其中 2 在 Barrier 前面;Channel 2 存在 4 个元素,其中 2、9、7在 Barrier 前面。
图 b:算子分别处理两个 Channel 一个元素,输出结果 2。此后接收到 Channel 1 的 Barrier,算子开始本地快照记录自己的状态,并输出 Barrier。
图 c:算子继续正常处理两个 Channel 的输入,输出 9。特别的地方是 Channel 2 后续元素会被保存下来,直到 Channel 2 的 Barrier 出现(即 Channel 2 的 9 和 7)。保存的数据会作为 Channel 的状态成为快照的一部分。
两者的差异主要可以总结为两点:
快照的触发是在接收到第一个 Barrier 时还是在接收到最后一个 Barrier 时。
是否需要阻塞已经接收到 Barrier 的 Channel 的计算。
从这两点来看,新的 Unaligned Checkpoint 将快照的触发改为第一个 Barrier 且取消阻塞 Channel 的计算,算法上与 Chandy-Lamport 基本一致,同时在实现细节方面结合 Flink 的定位做了几个改进。
首先,不同于 Chandy-Lamport 模型的只需要考虑算子输入 Channel 的状态,Flink 的算子有输入和输出两种 Channel,在快照时两者的状态都需要被考虑。其次,无论在 Chandy-Lamport 还是 Flink Aligned Checkpoint 算法中,Barrier 都必须遵循其在数据流中的位置,算子需要等待 Barrier 被实际处理才开始快照。而 Unaligned Checkpoint 改变了这个设定,允许算子优先摄入并优先输出 Barrier。如此一来,第一个到达 Barrier 会在算子的缓存数据队列(包括输入 Channel 和输出 Channel)中往前跳跃一段距离,而被”插队”的数据和其他输入 Channel 在其 Barrier 之前的数据会被写入快照中。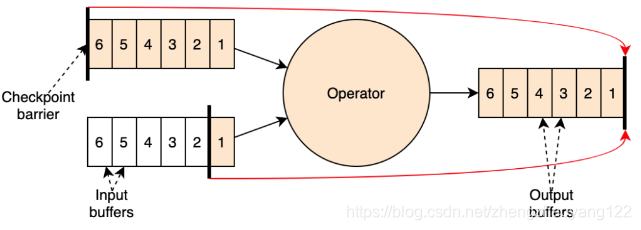
![]()
这样的主要好处是,如果本身算子的处理就是瓶颈,Chandy-Lamport 的 Barrier 仍会被阻塞,但 Unaligned Checkpoint 则可以在 Barrier 进入输入 Channel 就马上开始快照。这可以从很大程度上加快 Barrier 流经整个 DAG 的速度,从而降低 Checkpoint 整体时长。回到之前的例子,用 Unaligned Checkpoint 来实现,状态变化如下: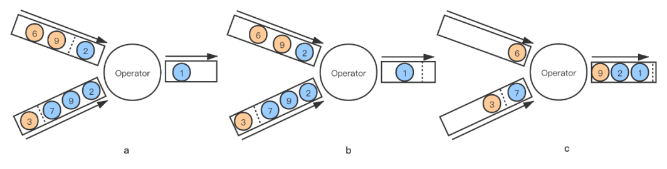
![]()
图 a:输入 Channel 1 存在 3 个元素,其中 2 在 Barrier 前面;Channel 2 存在 4 个元素,其中 2、9、7在 Barrier 前面。输出 Channel 已存在结果数据 1。
图 b:算子优先处理输入 Channel 1 的 Barrier,开始本地快照记录自己的状态,并将 Barrier 插到输出 Channel 末端。
图 c:算子继续正常处理两个 Channel 的输入,输出 2、9。同时算子会将 Barrier 越过的数据(即输入 Channel 1 的 2 和输出 Channel 的 1)写入 Checkpoint,并将输入 Channel 2 后续早于 Barrier 的数据(即 2、9、7)持续写入 Checkpoint。
比起 Aligned Checkpoint 中不同 Checkpoint 周期的数据以算子快照为界限分隔得很清晰,Unaligned Checkpoint 进行快照和输出 Barrier 时,部分本属于当前 Checkpoint 的输入数据还未计算(因此未反映到当前算子状态中),而部分属于当前 Checkpoint 的输出数据却落到 Barrier 之后(因此未反映到下游算子的状态中)。
这也正是 Unaligned 的含义:不同 Checkpoint 周期的数据没有对齐,包括不同输入 Channel 之间的不对齐,以及输入和输出间的不对齐。而这部分不对齐的数据会被快照记录下来,以在恢复状态时重放。换句话说,从 Checkpoint 恢复时,不对齐的数据并不能由 Source 端重放的数据计算得出,同时也没有反映到算子状态中,但因为它们会被 Checkpoint 恢复到对应 Channel 中,所以依然能提供只计算一次的准确结果。
当然,Unaligned Checkpoint 并不是百分百优于 Aligned Checkpoint,它会带来的已知问题就有:
【1】由于要持久化缓存数据,State Size 会有比较大的增长,磁盘负载会加重。
【2】随着 State Size 增长,作业恢复时间可能增长,运维管理难度增加。
目前看来,Unaligned Checkpoint 更适合容易产生高反压同时又比较重要的复杂作业。对于像数据 ETL 同步等简单作业,更轻量级的 Aligned Checkpoint 显然是更好的选择。
总结:Flink 1.11 的 Unaligned Checkpoint 主要解决在高反压情况下作业难以完成 Checkpoint 的问题,同时它以磁盘资源为代价,避免了 Checkpoint 可能带来的阻塞,有利于提升 Flink 的资源利用率。随着流计算的普及,未来的 Flink 应用大概会越来越复杂,在未来经过实战打磨完善后 Unaligned Checkpoint 很有可能会取代 Aligned Checkpoint 成为 Flink 的默认 Checkpoint 策略。

