Halcon 透视图仿射变换
参考measure_perspective_scratch.hdev例程
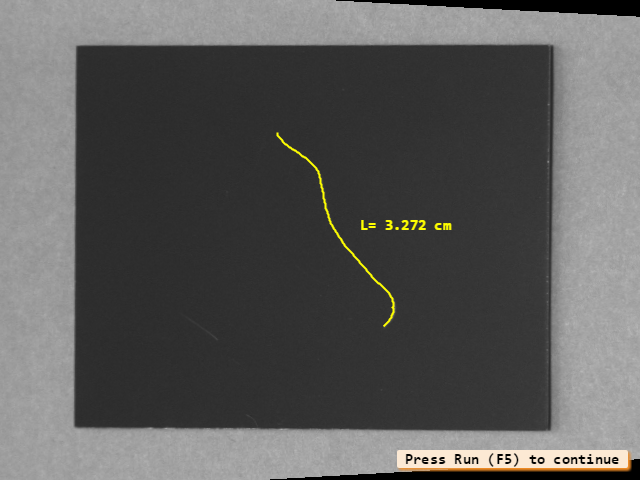
* PoseCalib相机外参 * 逆时针旋转90度(根据选择的标位姿图片XY方向确定) tuple_replace (PoseCalib, 5, PoseCalib[5] - 90, PoseCalibRot) * 原点平移 单位m * 假设原图物理宽度为80mm,则 * PixelDist=0.08m/640pixel, * -0.04=-0.5*0.08m, * -0.03=-0.4*0.08m set_origin_pose (PoseCalibRot, -0.04, -0.03, 0.00075, Pose) * 像素距离 1pixel对于?m PixelDist := 0.00013 * 将三维位姿转换为齐次变换矩阵 pose_to_hom_mat3d (Pose, HomMat3D) * 生成一个投影映射来描述一个世界坐标系的像平面和一个平面z=0之间的映射 gen_image_to_world_plane_map (Map, CamParam, Pose, Width, Height, Width, Height, PixelDist, 'bilinear') map_image (Image, Map, ModelImageMapped)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号