


SLAM学习笔记 - 视觉SLAM方法资源汇总
工具类:
数据集:
提供python写的工具,参考 TUM数据集测评工具的使用
除此之外提供online测试
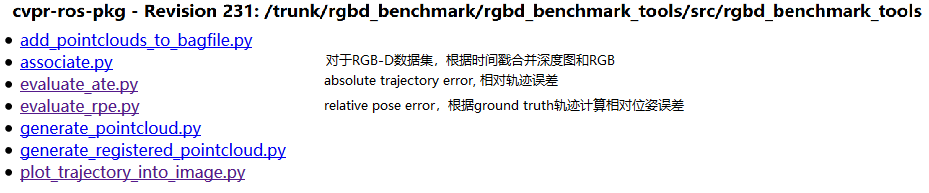
合并深度图和rgb:
python associate.py rgb.txt depth.txt > associations.txt #如果没有最后那个选项会把结果直接打印到控制台
对齐输出轨迹,并计算误差:
python eveluate_ate.py --save alignedTrajectory.txt groundtruth.txt KeyFrameTrajectory.txt
科研类:
PTAM - ISMAR2007 英国牛津 Georg Klein 主页及代码 PTAM-GPL
DTAM - ICCV2011 伦敦帝国理工学院 Richard paper
RGB-D_SLAM Trans. on Robotics2014 开源代码
ORB-SLAM - Trans. on Robotics2015 西班牙Raúl Mur Artal 主页 ORB-SLAM开源代码 ORB-SLAM2开源代码
SVO - ICRA2014 瑞士苏黎世大学 Christian Forster 开源代码
LSD-SLAM 2014 德国慕尼黑工业大学(TMU) Jakob Engel 开源代码
德国慕尼黑工业大学计算机视觉组:https://vision.in.tum.de/research/vslam
一个更全的统计:Awesome SLAM\
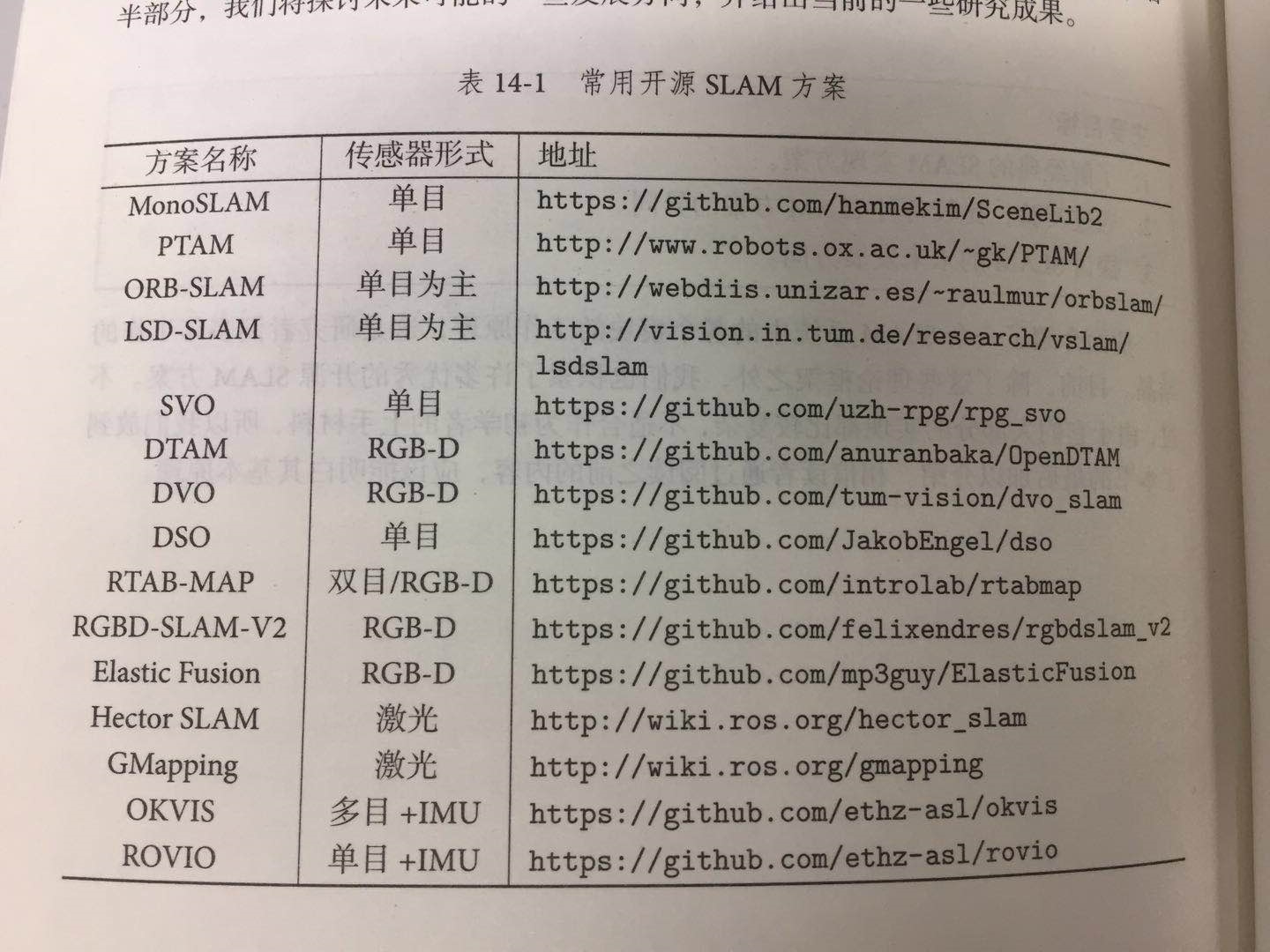
来自高翔,《视觉SLAM十四讲:从理论到实践》
