

Bullet核心类介绍(Bullet 2.82 HelloWorld程序及其详解,附程序代码)
实验平台:win7,VS2010
先上结果截图:
文章最后附有生成该图的程序。
1. 刚体模拟原理
Bullet作为一个物理引擎,其任务就是刚体模拟(还有可变形体模拟)。刚体模拟,就是要计算预测物体的运动,举个例子,我抛一块砖头,砖头砸在地上翻了几圈最后停下来,刚体模拟就是要用计算机把这一切虚拟化(给定砖头形状质量等属性及砖头初始运动状态,还要给定地面的信息,预测砖头未来任意时刻状态)。
刚体模拟的主要理论基础是牛顿力学(高中物理水平)。可以想见,如果刚体之间没有碰撞,刚体模拟很简单,就是自由落体计算。复杂性存在于碰撞的处理,而处理碰撞首先要检测到碰撞。碰撞检测最基本的方法就是两两刚体测试看其是否碰撞,这是不能满足效率要求的,因为每个刚体可能形状很复杂。为了进行快速碰撞检测,一般使用包围盒(Bounding Box,如AABB:Axis-Aligned Bounding Box、OBB:Oriented Bounding Box)技术,包围盒是一种简单几何体(长方体或球),刚体完全被其包含在里边。一般将碰撞检测分为两步:
- Broadphase Collision Detection:两两刚体,测试其包围盒是否重叠(即包围盒的碰撞检测,因为包围盒是一种简单几何体,存在快速算法处理包围盒的碰撞检测)。
- Narrowphase collision detection (dispatcher):对于Broadphase检测出的刚体对,进行刚体碰撞检测,任务为二,检测刚体之间是否碰撞,如果碰撞,计算出接触点(contact point)。
这样,我们总结出,物理引擎要进行刚体模拟所要做的事(每一时间步要做的事):
- Broadphase Collision Detection;
- Narrowphase collision detection;
- 碰撞处理,由接触点及刚体属性根据物理方程计算刚体的新状态(新速度等);
- 更新刚体位置并输出给3D图形接口,以显示动画。
且看Bullet为了完成刚体模拟这一复杂任务而设计的Rigid Body Physics Pipeline(刚体物理引擎管线):
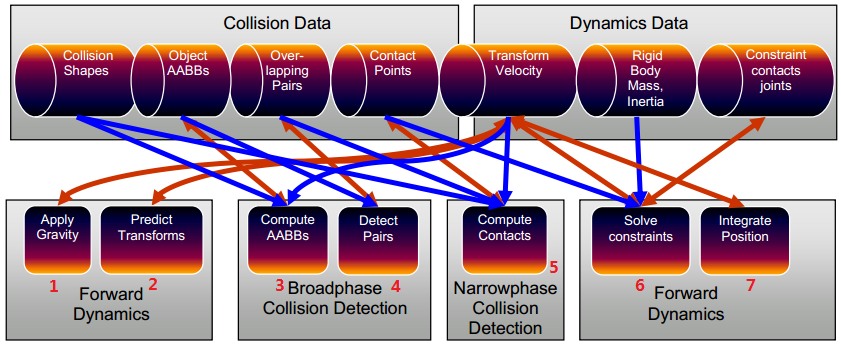
上面是Bullet的数据,下面是Bullet的刚体模拟计算步骤,对应于我们的理论分析,对照关系是这样的(管线图用红色数字标注):
- 第1步对应管线图中:3、4;
- 第2步对应管线图中:5;
- 第3步对应管线图中:6;
- 第4步对应管线图中:7、1、2;
可以看出,为了实现的需要,Bullet将我们分析的刚体模拟循环的起点改了。
2. 对应刚体模拟几个步骤的Bullet类
- Bullet用btDynamicsWorld类抽象整个被模拟的世界,即btDynamicsWorld包含所有四步,另外还包含数据;
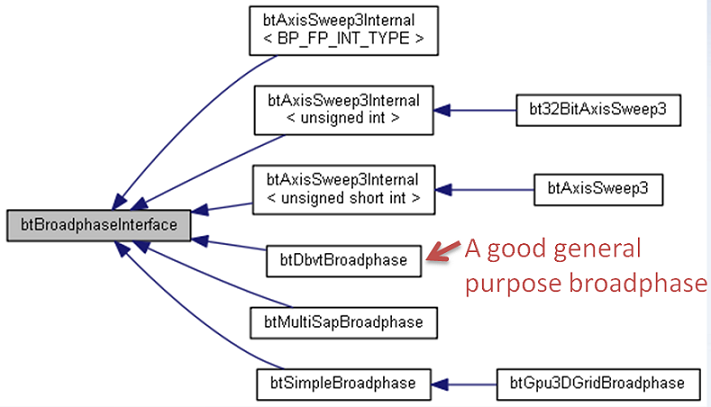
- 负责Broadphase Collision Detection步骤任务的类是btBroadphaseInterface;
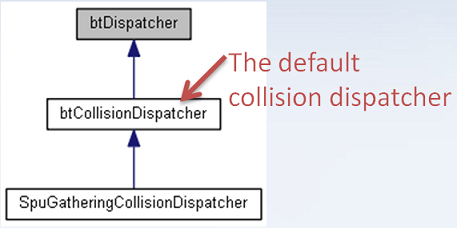
- 负责Narrowphase collision detection的类是btDispatcher ;
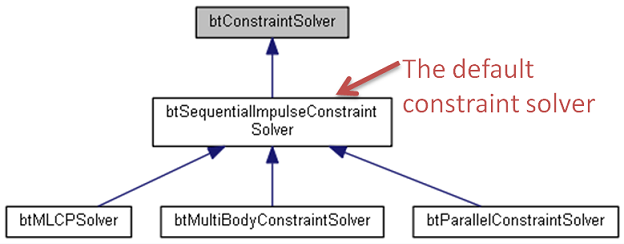
- 负责碰撞处理(约束处理)的类是btConstraintSolver;
- 最后一步则有btDynamicsWorld类的stepSimulation方法完成;
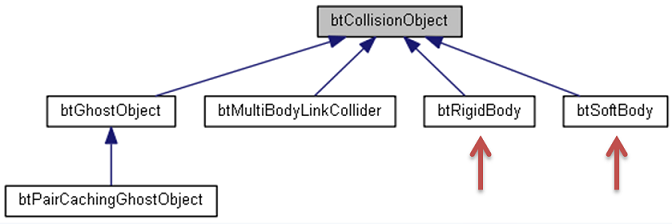
- 另外表示刚体数据的类是btCollisionObject;
上面介绍的类都是基类,实际完成具体任务的可能是他们的子类。
3. 关键类的具体分析
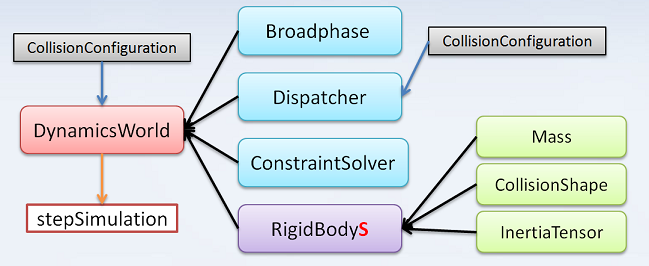
首先将Bullet高层结构总结如下图:
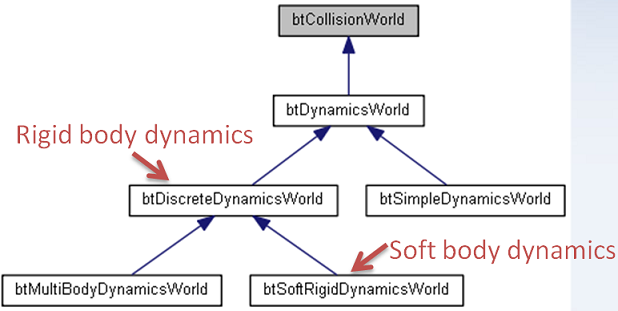
后面几张图示从Bullet API文档中摘的,除了在线Bullet API文档,你也可以自己用Doxygen生成离线API文档。
另外从btDynamicsWorld类的合作图可以看出上述分析的正确性:
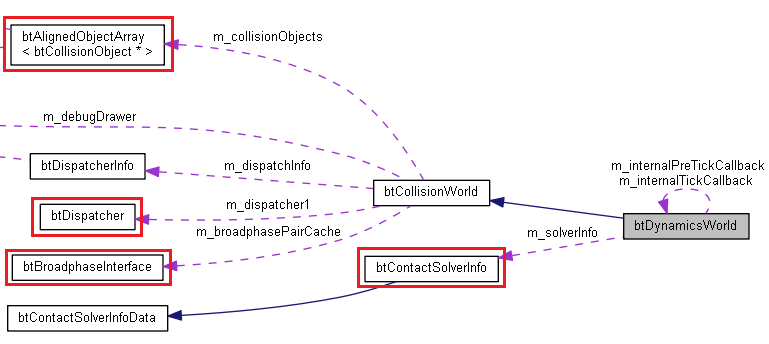
如上图红圈所示,btDynamicsWorld中包含了(或者说指向了)Broadphase、Dispatcher、ConstraintSolver、RigidBodys(多个,RigidBody数组)。
4. Bullet 2.82 HelloWorld程序
代码如下:

1 #include"GL/glew.h"
2 #include"GL/freeglut.h"
3 #include"btBulletDynamicsCommon.h"
4 #include"omp.h"
5
6 btDiscreteDynamicsWorld* m_DynamicsWorld;
7 btBroadphaseInterface* m_Broadphase;
8 btCollisionDispatcher* m_Dispatcher;
9 btSequentialImpulseConstraintSolver* m_ConstraintSolver;
10 btDefaultCollisionConfiguration* m_CollisionConfiguration;
11 btAlignedObjectArray<btCollisionShape*> m_CollisionShapes;
12
13 void bt_rundraw(bool run)
14 {
15 static double t_Last = omp_get_wtime();
16 if(run){
17 double t2 = omp_get_wtime();
18 m_DynamicsWorld->stepSimulation(float(t2-t_Last),10);
19 t_Last = t2;
20 }else{
21 t_Last = omp_get_wtime();
22 }
23
24 btCollisionObjectArray& rigidArray = m_DynamicsWorld->getCollisionObjectArray();
25 for(int i=0; i<rigidArray.size(); ++i){
26 btRigidBody* body = btRigidBody::upcast(rigidArray[i]);
27 btTransform trans;
28 body->getMotionState()->getWorldTransform(trans);
29 float m[16];
30 trans.getOpenGLMatrix(m);
31 GLfloat color[]={.5f, .6f, .7f, 1.0f};
32 if(i==0){
33 glMaterialfv(GL_FRONT_AND_BACK, GL_AMBIENT_AND_DIFFUSE, color);
34 glMatrixMode(GL_MODELVIEW);
35 glPushMatrix();
36 glMultMatrixf(m);
37 glTranslatef(0,-1,0);
38 glScalef(100.0f,1.0f,100.0f);
39 glutSolidCube(1.f);
40 glPopMatrix();
41 }else{
42 if(i%2){
43 color[0]=0.0f;color[1]=0.9f;color[2]=0.0f;color[3]=1.0f;
44 }else{
45 color[0]=0.9f;color[1]=0.0f;color[2]=0.0f;color[3]=1.0f;
46 }
47 glMaterialfv(GL_FRONT_AND_BACK, GL_AMBIENT_AND_DIFFUSE, color);
48 glMatrixMode(GL_MODELVIEW);
49 glPushMatrix();
50 glMultMatrixf(m);
51 glScalef(3.0f,2.0f,4.0f);
52 glutSolidCube(1.f);
53 glPopMatrix();
54 }
55 }
56 }
57
58 void bt_start()
59 {
60 ///-----initialization_start-----
61 m_CollisionConfiguration = new btDefaultCollisionConfiguration();
62 m_Dispatcher = new btCollisionDispatcher(m_CollisionConfiguration);
63 m_Broadphase = new btDbvtBroadphase();
64 m_ConstraintSolver = new btSequentialImpulseConstraintSolver;
65 m_DynamicsWorld = new btDiscreteDynamicsWorld(
66 m_Dispatcher,m_Broadphase,m_ConstraintSolver,m_CollisionConfiguration);
67 m_DynamicsWorld->setGravity(btVector3(0,-10,0));
68 ///-----initialization_end-----
69
70 { // floor
71 btCollisionShape* groundShape = new btBoxShape(btVector3(btScalar(50.f),btScalar(0.f),btScalar(50.f)));
72 m_CollisionShapes.push_back(groundShape);
73
74 btTransform groundTransform;
75 groundTransform.setIdentity();
76 groundTransform.setOrigin(btVector3(0,0,0));
77 btScalar mass(0.f);
78
79 btVector3 localInertia(0,0,0);
80 if( mass != 0.f )
81 groundShape->calculateLocalInertia(mass,localInertia);
82
83 //using motionstate is recommended, it provides interpolation capabilities, and only synchronizes 'active' objects
84 btDefaultMotionState* myMotionState = new btDefaultMotionState(groundTransform);
85 btRigidBody::btRigidBodyConstructionInfo rbInfo(mass,myMotionState,groundShape,localInertia);
86 btRigidBody* body = new btRigidBody(rbInfo);
87
88 //add the body to the dynamics world
89 m_DynamicsWorld->addRigidBody(body);
90 }
91
92 for(int i=0; i<20; ++i){
93 btCollisionShape* boxShape = new btBoxShape(btVector3(btScalar(1.5f),btScalar(1.f),btScalar(2.f)));
94 m_CollisionShapes.push_back(boxShape);
95
96 btTransform groundTransform;
97 groundTransform.setIdentity();
98 groundTransform.setOrigin(btVector3(0,i*2.0f+1.0f,i*0.5f));
99 btScalar mass(6.f);
100
101 btVector3 localInertia(0,0,0);
102 if( mass != 0.f )
103 boxShape->calculateLocalInertia(mass,localInertia);
104
105 //using motionstate is recommended, it provides interpolation capabilities, and only synchronizes 'active' objects
106 btDefaultMotionState* myMotionState = new btDefaultMotionState(groundTransform);
107 btRigidBody::btRigidBodyConstructionInfo rbInfo(mass,myMotionState,boxShape,localInertia);
108 btRigidBody* body = new btRigidBody(rbInfo);
109
110 //add the body to the dynamics world
111 m_DynamicsWorld->addRigidBody(body);
112 }
113
114 }
115
116 void bt_end()
117 {
118 //remove the rigidbodies from the dynamics world and delete them
119 for (int i=m_DynamicsWorld->getNumCollisionObjects()-1; i>=0 ;i--)
120 {
121 btCollisionObject* obj = m_DynamicsWorld->getCollisionObjectArray()[i];
122 btRigidBody* body = btRigidBody::upcast(obj);
123 if (body && body->getMotionState())
124 delete body->getMotionState();
125 m_DynamicsWorld->removeCollisionObject( obj );
126 delete obj;
127 }
128 //delete collision shapes
129 for (int i=0;i<m_CollisionShapes.size();i++)
130 {
131 btCollisionShape* shape = m_CollisionShapes[i];
132 m_CollisionShapes[i] = 0;
133 delete shape;
134 }
135 //delete dynamicsworld and ...
136 delete m_DynamicsWorld;
137 delete m_ConstraintSolver;
138 delete m_Broadphase;
139 delete m_Dispatcher;
140 delete m_CollisionConfiguration;
141 m_CollisionShapes.clear();
142 }
bt_start()函数中构建DynamicsWorld,包括Broadphase、Dispatcher、ConstraintSolver、RigidBodys。Bullet的设计原则是:谁new对象,谁就负责delete它,所以在bt_end()函数中delete所有new出来的对象。bt_rundraw()函数调用btDiscreteDynamicsWorld:: stepSimulation()步进模拟时间,并用OpenGL绘制所模拟的物体。该程序用到了OpenMP库的时间函数,参见:OpenMP共享内存并行编程总结表。
bt_start()、bt_end()、bt_rundraw()的使用方法是:在初始化代码中调用bt_start(),在模拟完成(动画结束)后调用bt_end()释放资源,在绘制每帧时调用bt_rundraw()。
读者也可以看看Bullet Demo中的App_BasicDemo项目,这里指出App_BasicDemo项目中和Bullet相关代码的地方:和bt_start()对应的代码在BasicDemo::initPhysics()(BasicDemo.cpp文件116行);和bt_end()对应的代码在BasicDemo::exitPhysics()(BasicDemo.cpp文件231行);和bt_rundraw()对应的代码在BasicDemo::clientMoveAndDisplay()(BasicDemo.cpp文件64行),具体OpenGL绘制代码在父类里,就不细说了,可以看到,Bullet Demo使用了阴影体技术(Shadow Volumes)绘制阴影。
另外Bullet官网也有教程解释HelloWorld程序,见参考文献所列的链接。
考虑到方便本文的读者做实验,将程序共享出来,程序写的甚是简陋,请轻拍:
链接:http://pan.baidu.com/share/link?shareid=851836958&uk=2299460138 密码:k8sj
可以拖拽鼠标调整视角,滚动滚轮缩放,按键盘r键开始动画,OpenGL程序配置见我的另一篇文章:配置自己的OpenGL库,glew、freeglut库编译,库冲突解决(附OpenGL Demo程序)。Bullet的编译安装见:windows下Bullet 2.82编译安装(Bullet Physics开发环境配置)。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号