

Math4ML 优化与加速
共12章:基础概论、凸优化与无约束优化、最速下降法、牛顿法及其改进、共轭梯度法、拟牛顿法、约束优化、对偶定理、ML的风险与损失、梯度法及其改进、动量法及其改进、带约束的优化算法。
无约束优化——1 最速下降法
无约束优化——2 牛顿法
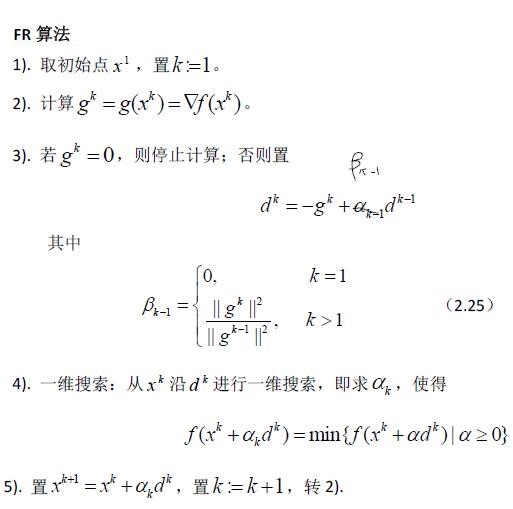
无约束优化——3 共轭梯度法
最速下降法和共轭梯度法的区别在于,共轭梯度法多了一个修正方向的步骤,仅此而已,例题:
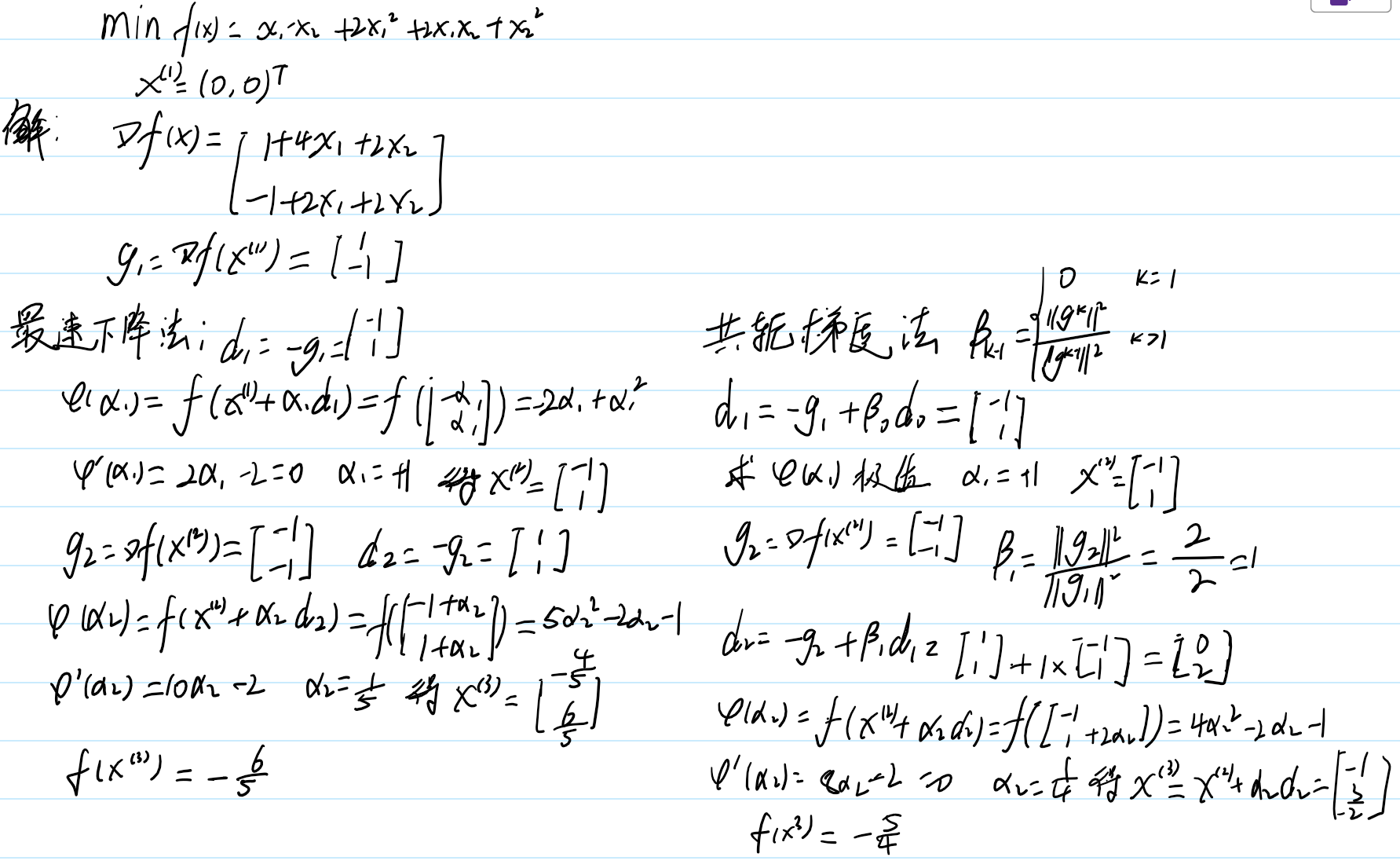
可以对比感受其中差异。
无约束优化——4 拟牛顿法
牛顿法和拟牛顿法区别在于DFP法用自适应的简单的矩阵去代替二阶导逆矩阵,并且每次迭代中多了一个迭代该矩阵的步骤,仅此而已,
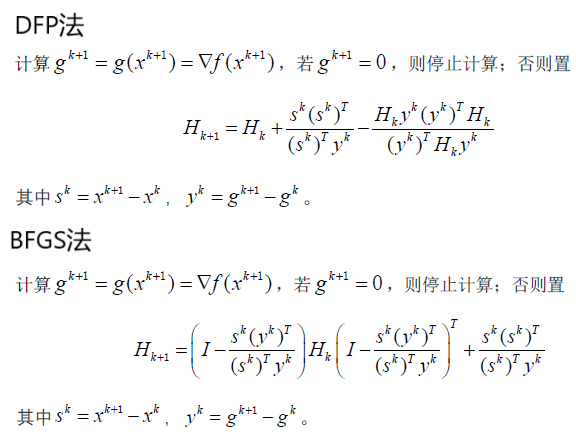
例题:
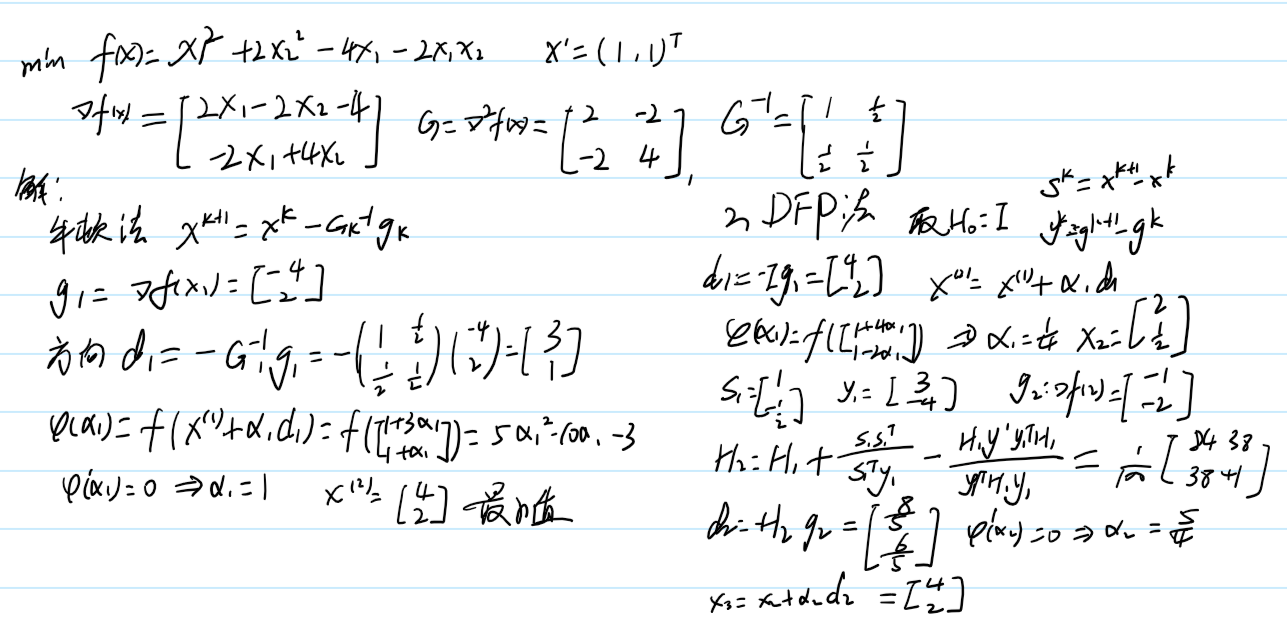
感受其中差异。
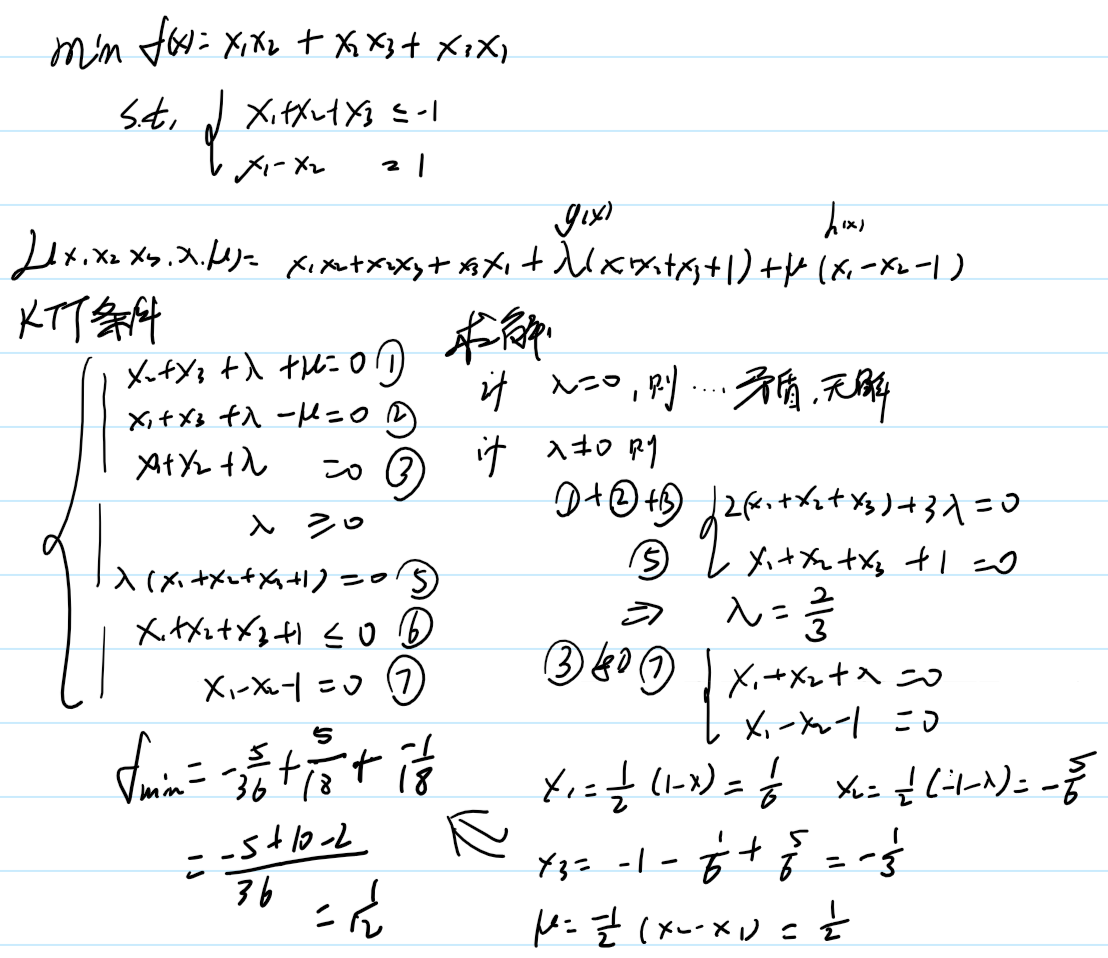
约束优化
很容易写出一个优化模型的KKT条件,只需要
1 写出拉格朗日函数,求梯度。
2 原始约束,包括等式和非等式
3 关于不等式约束,(1) 乘子大于等于0; (2)乘子和不等式左项 整体等于0。
以上三个组合起来,加上变量满足的取值范围,就是所有KKT条件了。
求解方法,很简单,分2类讨论,不等式约束的乘子为0的情况,然后不为0的情况,解方程求解。
例题:分类讨论λ为0的时候,我算过了,无解,过程略;所以λ不为0,那么不等式约束直接取等号,过程如下:
end
约束优化-对偶理论
方法和例题:
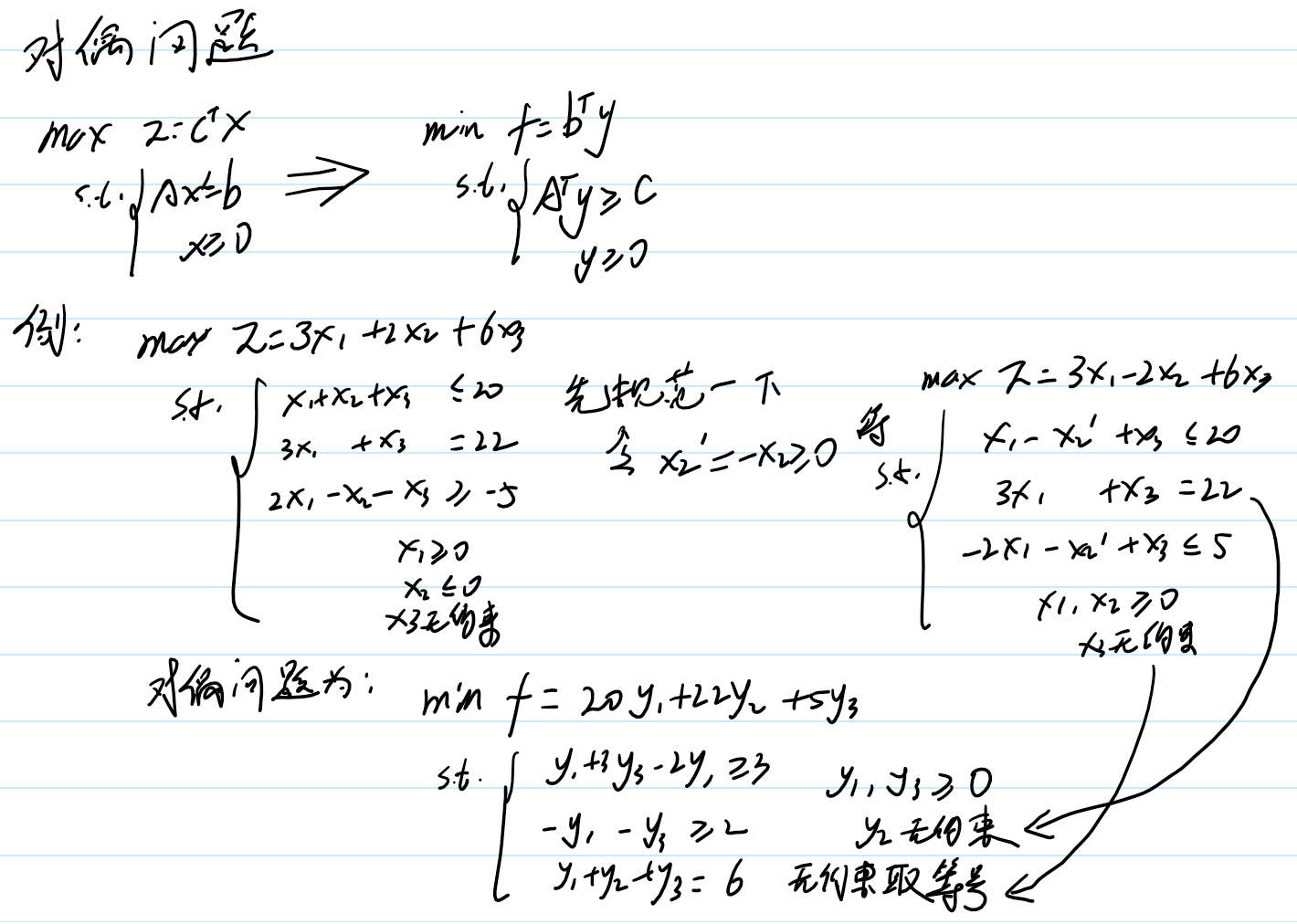
容易迷糊的点在于 等式与无约束的情况,注意即可。
梯度法及其改进
GD
AGD(加速梯度法)
SGD
SAG(Stochastic Average Gradient)、SAGA、SVRG
动量法及其改进
Momentum动量法
Nesterov加速算法
AdaGrad
RMSProp(Root Mean Square PRopogation)
Adam
基础知识:导数和极值的理论,重点是 偏导数、鞍点、梯度等等。
凸优化基本概念:常见凸集:射线、超平面、半空间等。凸锥、极方向、凸集分离定理、凸函数。
最优化基本概念:
常见优化问题:线性与非线性规划、二次规划、锥优化、整数规划、动态规划。
无约束优化问题的最优性条件:
-一阶必要条件:局部极小点处梯度为0.
-二阶必要条件:局部极小点处梯度为0,且二阶导半正定。
-二阶充分条件:梯度为0,且二阶导正定的点为局部极小点。
步长搜索:
-精确一维线搜索
-非精确线搜索准则:Armijo准则(Goldstein准则、Wolfe准则)、黄金分割法。

