STM32 例程-4 Proteus下串口发送数据
1、配置端口代码如下
void usart1_config()
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_USART1|RCC_APB2Periph_AFIO,ENABLE);
GPIO_InitTypeDef a;
a.GPIO_Pin=GPIO_Pin_9;
a.GPIO_Speed=GPIO_Speed_50MHz;
a.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Init(GPIOA,&a);
a.GPIO_Pin=GPIO_Pin_10;
a.GPIO_Mode=GPIO_Mode_IN_FLOATING;
a.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&a);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitTypeDef b;
b.NVIC_IRQChannel = USART1_IRQn;
b.NVIC_IRQChannelPreemptionPriority = 1;
b.NVIC_IRQChannelSubPriority = 1;
b.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&b);
USART_InitTypeDef c;
c.USART_BaudRate=9600;
c.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
c.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;
c.USART_WordLength=USART_WordLength_8b;
c.USART_Parity=USART_Parity_No;
c.USART_StopBits=USART_StopBits_1;
USART_Init(USART1,&c);
USART_Cmd(USART1,ENABLE);
}
2、完整代码如下
#include "stm32f10x.h"
__IO uint32_t TimingDelay;
u16 i=0;
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_usart.h"
#include "misc.h"
#include "stdio.h"
void usart1_config()
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_USART1|RCC_APB2Periph_AFIO,ENABLE);
GPIO_InitTypeDef a;
a.GPIO_Pin=GPIO_Pin_9;
a.GPIO_Speed=GPIO_Speed_50MHz;
a.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Init(GPIOA,&a);
a.GPIO_Pin=GPIO_Pin_10;
a.GPIO_Mode=GPIO_Mode_IN_FLOATING;
a.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&a);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitTypeDef b;
b.NVIC_IRQChannel = USART1_IRQn;
b.NVIC_IRQChannelPreemptionPriority = 1;
b.NVIC_IRQChannelSubPriority = 1;
b.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&b);
USART_InitTypeDef c;
c.USART_BaudRate=9600;
c.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
c.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;
c.USART_WordLength=USART_WordLength_8b;
c.USART_Parity=USART_Parity_No;
c.USART_StopBits=USART_StopBits_1;
USART_Init(USART1,&c);
USART_Cmd(USART1,ENABLE);
}
void LED_GPIO_Config(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU ;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStructure);
}
void NVIC_Configuare(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_SetVectorTable(NVIC_VectTab_FLASH,0x0);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
NVIC_InitStructure.NVIC_IRQChannel=TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=0x0F;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void TIM3_Configuare(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = 10-1;
TIM_TimeBaseStructure.TIM_Prescaler =(200-1);
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_ITConfig(TIM3,TIM_IT_Update|TIM_IT_Trigger,ENABLE);
TIM_Cmd(TIM3, ENABLE);
}
void delay_nms(__IO uint32_t nTime)
{
TimingDelay=nTime;
while(TimingDelay!=0);
}
void Init_SysTick(void){
if(SysTick_Config(SystemCoreClock/1000))
while(1);
}
int main(void)
{
u8 kent=0;
SystemInit();
RCC_ClockSecuritySystemCmd(ENABLE);
LED_GPIO_Config();
NVIC_Configuare();
TIM3_Configuare();
Init_SysTick();
usart1_config();
USART_SendData(USART1,'0');
while(1)
{
if(GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_9)==0)
{
delay_nms(10);
if(GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_9)==0)
kent++;
if(kent%2)
USART_SendData(USART1,'1');
else
{USART_SendData(USART1,'2');kent=0;}
while(GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_9)==0);
}
}
}
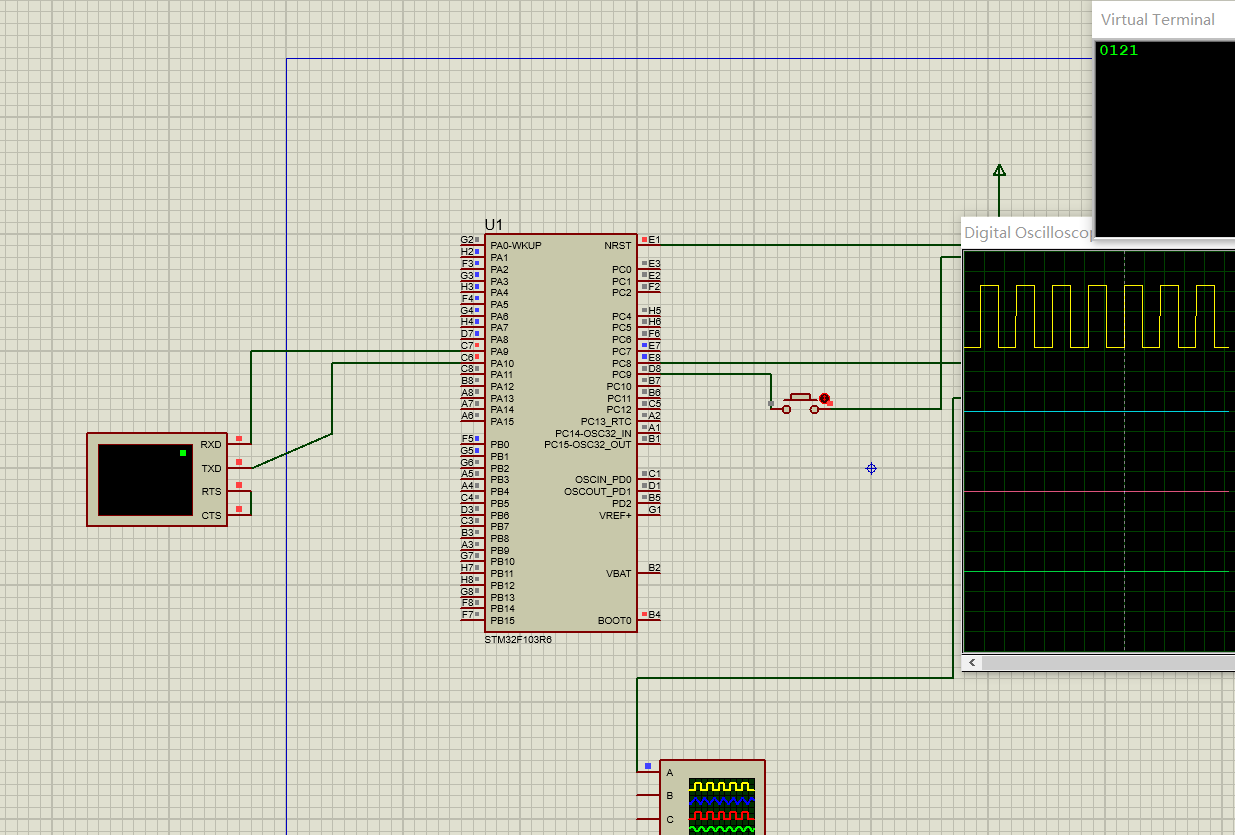
3、Proteus界面
4、注意仿真芯片频率至少要设置为8M,低于8M乱码。 ,
本博客是个人工作中记录,更深层次的问题可以提供有偿技术支持。
另外建了几个QQ技术群:
2、全栈技术群:616945527
2、硬件嵌入式开发: 75764412
3、Go语言交流群:9924600
闲置域名WWW.EXAI.CN (超级人工智能)出售。
另外建了几个QQ技术群:
2、全栈技术群:616945527
2、硬件嵌入式开发: 75764412
3、Go语言交流群:9924600
闲置域名WWW.EXAI.CN (超级人工智能)出售。

