1.寻找轮廓
api
void cv::findContours( InputOutputArray image, OutputArrayOfArrays contours, OutputArray hierarchy, int mode, int method, Point offset = Point()
各个参数详解如下:
- Image表示输入图像,必须是二值图像,二值图像可以threshold输出、Canny输出、inRange输出、自适应阈值输出等。
- Contours获取的轮廓,每个轮廓是一系列的点集合
- Hierarchy轮廓的层次信息,每个轮廓有四个相关信息,分别是同层下一个、前一个、第一个子节点、父节点
- mode 表示轮廓寻找时候的拓扑结构返回 -RETR_EXTERNAL表示只返回最外层轮廓 -RETR_TREE表示返回轮廓树结构
-
CV_RETR_EXTERNAL:只检测外轮廓。忽略轮廓内部的洞
-
CV_RETR_LIST:检测所有轮廓,但不建立继承(包含)关系
-
CV_RETR_TREE:检测所有轮廓,并且建立所有的继承(包含)关系。也就是说用CV_RETR_EXTERNAL和CV_RETR_LIST方法的时候hierarchy这个变量是没用的,因为前者没有包含关系,找到的都是外轮廓,后者仅仅是找到所哟的轮廓但并不把包含关系区分。用TREE这种检测方法的时候我们的hierarchy这个参数才是有意义的
-
CV_RETR_CCOMP:检测所有轮廓,但是仅仅建立两层包含关系。外轮廓放到顶层,外轮廓包含的第一层内轮廓放到底层,如果内轮廓还包含轮廓,那就把这些内轮廓放到顶层去。
-
- Method表示轮廓点集合取得是基于什么算法,常见的是基于CHAIN_APPROX_SIMPLE链式编码方法
注意,如果图像底色是白色,则检测最外层的轮廓为图像边框
2.绘制轮廓外接矩形
绘制外接矩形包括两种:
- 绘制最大外接矩形
(Rect cv::boundingRect( InputArray points ))
其中,输入参数points为一系列点的集合(findContours中contours中的一个元素),对轮廓来说就是该轮廓的点集 返回结果是一个矩形,x, y, w, h
- 绘制最小外接矩形
RotatedRect cv::minAreaRect( InputArray points )
其中,输入参数points为一系列点的集合(findContours中contours中的一个元素) ,对轮廓来说就是该轮廓的点集 返回结果是一个旋转矩形,包含下面的信息: - 矩形中心位置 - 矩形的宽高 - 旋转角度。
3.代码
EdgeDetection.h
1 #pragma once 2 #include<opencv2/opencv.hpp> 3 #include<iostream> 4 5 using namespace std; 6 using namespace cv; 7 8 9 class EdgeDetection 10 { 11 cv::Mat m_img; 12 cv::Mat m_canny; 13 public: 14 EdgeDetection(cv::Mat iamge); 15 bool cannyProcess(unsigned int downThreshold,unsigned int upThreshold); 16 bool getContours(); 17 18 ~EdgeDetection(); 19 };
EdgeDetection.cpp
1 #include "EdgeDetection.h" 2 3 EdgeDetection::EdgeDetection(cv::Mat image) 4 { 5 m_img = image; 6 } 7 8 bool EdgeDetection::cannyProcess(unsigned int downThreshold, unsigned int upThreshold) 9 { 10 bool ret=true; 11 12 if (m_img.empty()) 13 { 14 ret = false; 15 } 16 17 cv::Canny(m_img, m_canny, downThreshold, upThreshold); 18 cv::imshow("Canny", m_canny); 19 20 return ret; 21 } 22 23 bool EdgeDetection::getContours() 24 { 25 bool ret = true; 26 if (m_canny.empty()) 27 { 28 ret = false; 29 } 30 31 cv::Mat k = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(3, 3), cv::Point(-1, -1)); 32 cv::dilate(m_canny, m_canny, k); 33 imshow("dilate", m_canny); 34 35 // 轮廓发现与绘制 36 vector<vector<cv::Point> > contours; 37 vector<Vec4i> hierarchy; 38 findContours(m_canny, contours, cv::RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point()); 39 40 for (size_t i = 0; i < contours.size();++i) 41 { 42 // 最大外接轮廓 43 cv::Rect rect = cv::boundingRect(contours[i]); 44 cv::rectangle(m_img,rect,cv::Scalar(0,255,0),2,LINE_8); 45 46 47 // 最小外接轮廓 48 RotatedRect rrt = minAreaRect(contours[i]); 49 Point2f pts[4]; 50 rrt.points(pts); 51 // 绘制旋转矩形与中心位置 52 for (int i = 0; i < 4; i++) { 53 line(m_img, pts[i % 4], pts[(i + 1) % 4], Scalar(0, 0, 255), 2, 8, 0); 54 } 55 Point2f cpt = rrt.center; 56 circle(m_img, cpt, 2, Scalar(255, 0, 0), 2, 8, 0); 57 } 58 59 60 61 62 63 imshow("contours", m_img); 64 return ret; 65 } 66 67 EdgeDetection::~EdgeDetection() 68 { 69 }
main.cpp
#include"EdgeDetection.h" using namespace std; using namespace cv; int main(int argc, char* argv[]) { Mat src = imread("rect.jpg"); if (src.empty()) { cout << "image is empty" << endl; return -1; } imshow("input", src); EdgeDetection ed(src); ed.cannyProcess(80,160); ed.getContours(); waitKey(0); return 0; }
原图

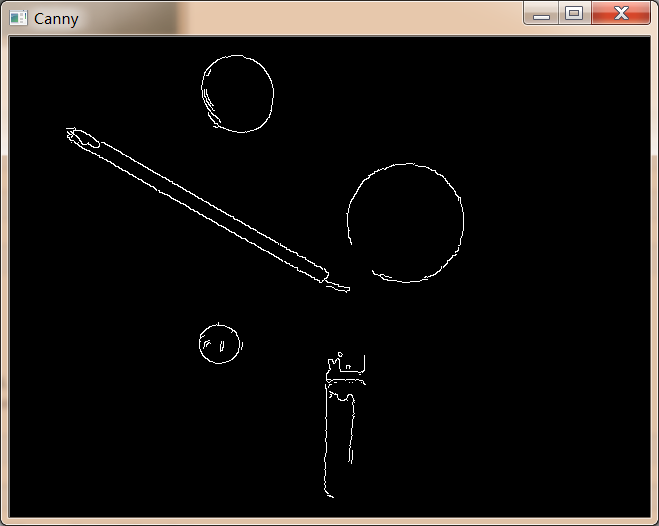
canny
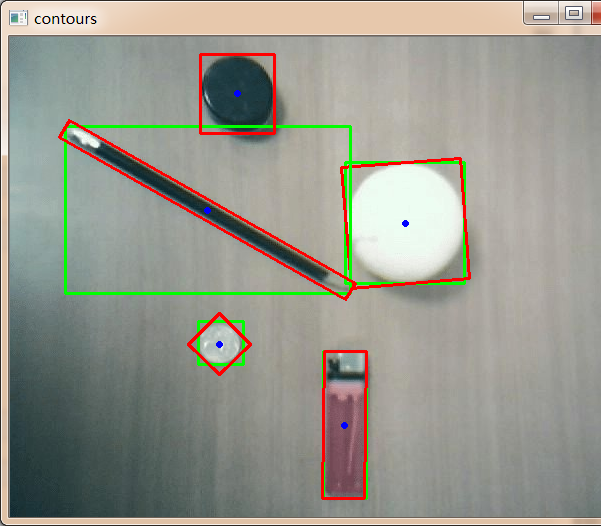
目标图