



def make_train_step_fn(model, loss_fn, optimizer): def perform_train_step_fn(x, y): # Set model to TRAIN mode model.train() # Step 1 - Compute model's predictions - forward pass yhat = model(x) # Step 2 - Compute the loss loss = loss_fn(yhat, y) # Step 3 - Compute the gradients for both parameters "b" and "w" loss.backward() # Step 4 - Update parameters using gradients and the learning rate optimizer.step() optimizer.zero_grad() # Return the loss return loss.item() return perform_train_step_fn
%%writefile model_configuration/v1.py device = 'cuda' if torch.cuda.is_available() else 'cpu' # Set learning rate lr = 0.1 torch.manual_seed(42) model = nn.Sequential(nn.Linear(1, 1)).to(device) # Define an SGD optimizer to update the parameters (now retrieved directly from the model) optimizer = torch.optim.SGD(model.parameters(), lr=lr) # Define an MSE loss function loss_fn = nn.MSELoss(reduction='mean') # Create the train_step function for model, loss function and optimizer train_step_fn = make_train_step_fn(model, loss_fn, optimizer)

%%writefile model_training/v1.py n_epochs = 1000 losses = [] for epoch in range(n_epochs): # Perform one train step and return the corresponding loss loss = train_step_fn(x_train_tensor.reshape(-1, 1), y_train_tensor.reshape(-1, 1)) losses.append(loss)

class CustomDataset(Dataset): def __init__(self, x_tensor, y_tensor): self.x = x_tensor self.y = y_tensor def __getitem__(self, index): return (self.x[index], self.y[index]) def __len__(self): return len(self.x) # Wait, is this a CPU tensor now? Why? Where is .to(device)? x_train_tensor = torch.from_numpy(x_train).float() y_train_tensor = torch.from_numpy(y_train).float() train_data = CustomDataset(x_train_tensor, y_train_tensor) print(train_data[0]) # (tensor(0.8446), tensor(2.8032))



%%writefile data_preparation/v1.py x_train_tensor = torch.from_numpy(x_train).float().reshape(-1, 1) y_train_tensor = torch.from_numpy(y_train).float().reshape(-1, 1) # Build Dataset train_data = TensorDataset(x_train_tensor, y_train_tensor) # Build DataLoader train_loader = DataLoader(dataset=train_data, batch_size=16, shuffle=True)
%%writefile model_training/v2.py n_epochs = 1000 losses = [] for epoch in range(n_epochs): mini_batch_losses = [] for x_batch, y_batch in train_loader: # the dataset "lives" in the CPU, so do our mini-batches therefore, # we need to send those mini-batches to the device where the model "lives" x_batch = x_batch.to(device) y_batch = y_batch.to(device) # Perform one train step and return the corresponding loss for this mini-batch mini_batch_loss = train_step_fn(x_batch, y_batch) mini_batch_losses.append(mini_batch_loss) # Computes average loss over all mini-batches - that's the epoch loss loss = np.mean(mini_batch_losses) losses.append(loss)

def mini_batch(device, data_loader, step_fn): mini_batch_losses = [] for x_batch, y_batch in data_loader: x_batch = x_batch.to(device) y_batch = y_batch.to(device) mini_batch_loss = step_fn(x_batch, y_batch) mini_batch_losses.append(mini_batch_loss) loss = np.mean(mini_batch_losses) return loss

%%writefile model_training/v3.py n_epochs = 200 losses = [] for epoch in range(n_epochs): loss = mini_batch(device, train_loader, train_step_fn) losses.append(loss)



%%writefile data_preparation/v2.py torch.manual_seed(13) # Build tensors from numpy arrays BEFORE split x_tensor = torch.from_numpy(x).float().reshape(-1, 1) y_tensor = torch.from_numpy(y).float().reshape(-1, 1) # Build dataset containing ALL data points dataset = TensorDataset(x_tensor, y_tensor) # Perform split ratio = .8 n_total = len(dataset) n_train = int(n_total * ratio) n_val = n_total - n_train train_data, val_data = random_split(dataset, [n_train, n_val]) # Build a loader for each set train_loader = DataLoader(dataset=train_data, batch_size=16, shuffle=True) val_loader = DataLoader(dataset=val_data, batch_size=16)

def make_val_step_fn(model, loss_fn): # Build function that performs a step in the validation loop def perform_val_step_fn(x, y): # Set model to EVAL mode model.eval() # Step 1 - Compute model's predictions - forward pass yhat = model(x) # Step 2 - Compute the loss loss = loss_fn(yhat, y) # There is no need to compute Steps 3 and 4, since we don't update parameters during evaluation return loss.item() return perform_val_step_fn

%%writefile model_configuration/v2.py device = 'cuda' if torch.cuda.is_available() else 'cpu' # Sets learning rate - this is "eta" ~ the "n" like Greek letter lr = 0.1 torch.manual_seed(42) # Now we can create a model and send it at once to the device model = nn.Sequential(nn.Linear(1, 1)).to(device) # Defines a SGD optimizer to update the parameters (now retrieved directly from the model) optimizer = optim.SGD(model.parameters(), lr=lr) # Defines a MSE loss function loss_fn = nn.MSELoss(reduction='mean') # Creates the train_step function for our model, loss function and optimizer train_step_fn = make_train_step_fn(model, loss_fn, optimizer) # Creates the val_step function for our model and loss function val_step_fn = make_val_step_fn(model, loss_fn)


%%writefile model_training/v4.py n_epochs = 200 losses = [] val_losses = [] for epoch in range(n_epochs): loss = mini_batch(device, train_loader, train_step_fn) losses.append(loss) # VALIDATION # no gradients in validation! with torch.no_grad(): val_loss = mini_batch(device, val_loader, val_step_fn) val_losses.append(val_loss)




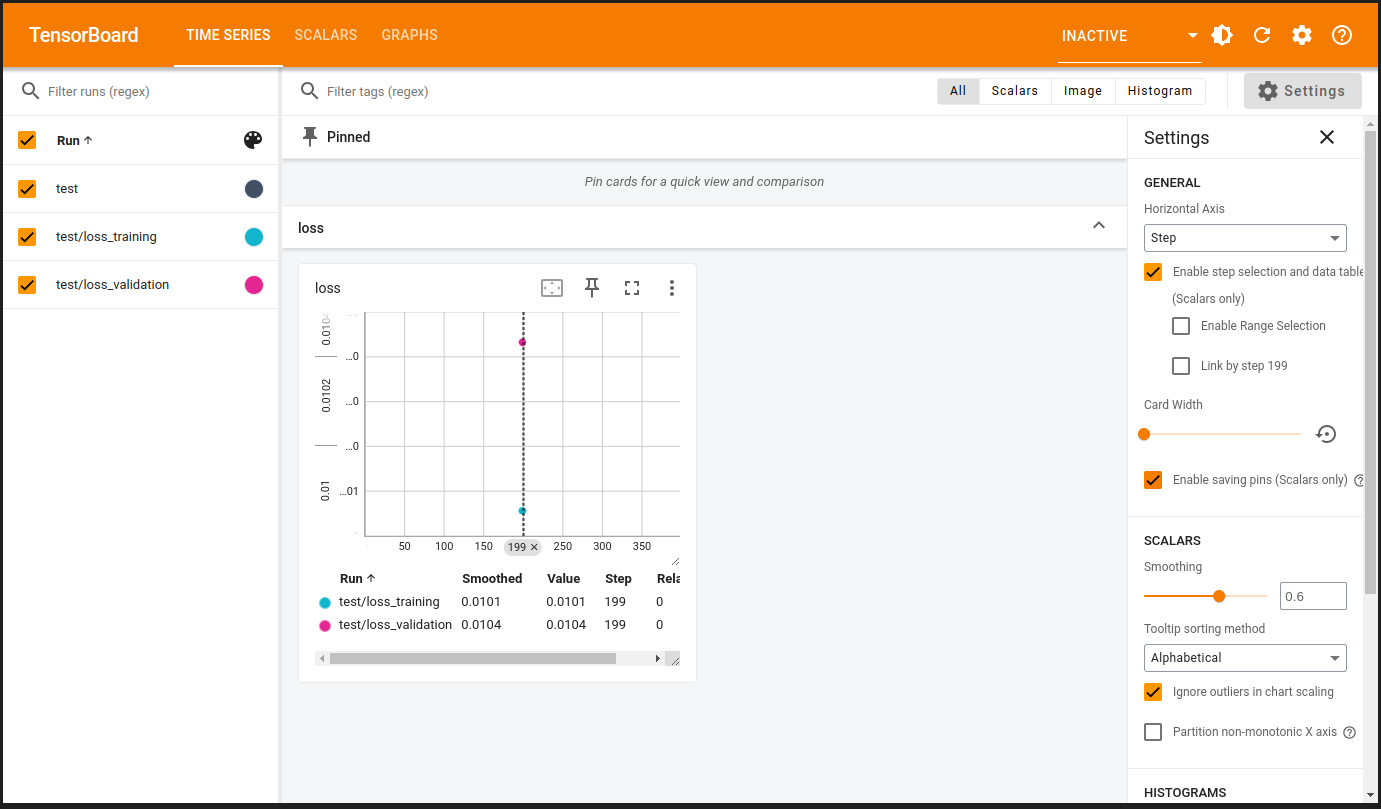
writer = SummaryWriter('runs/test') # from torch.utils.tensorboard import SummaryWriter





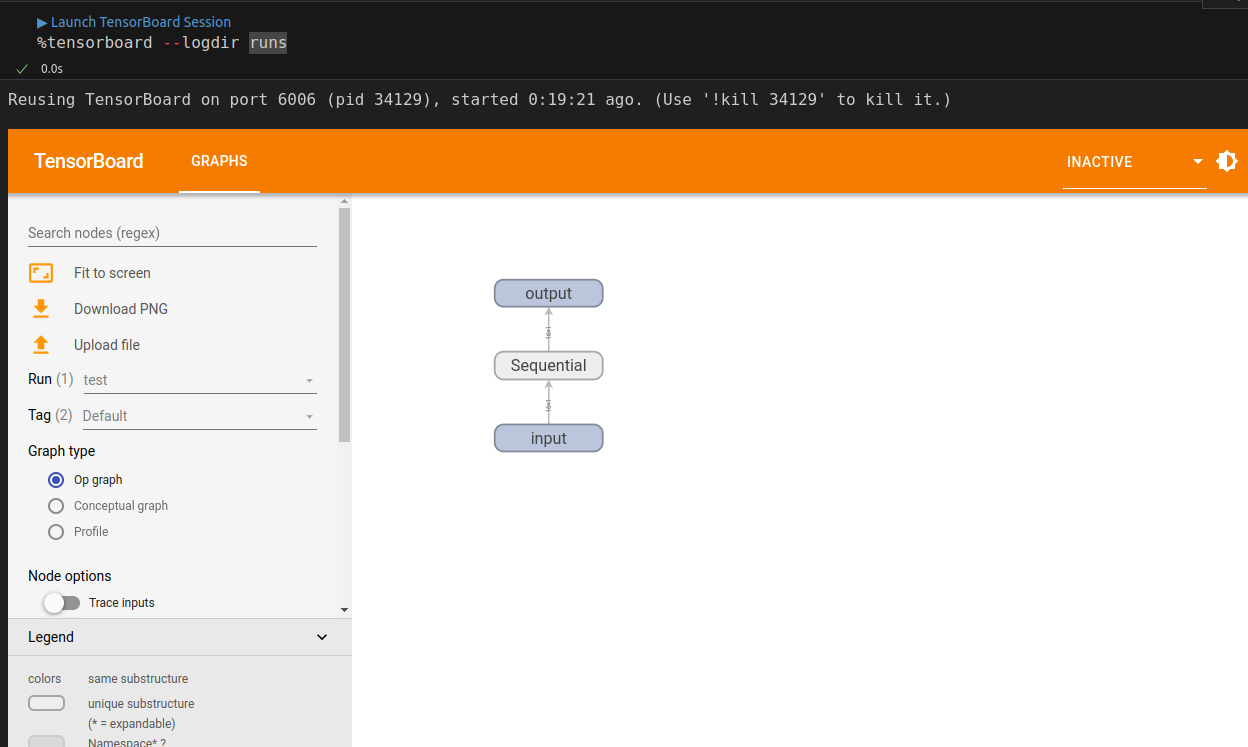
# Fetch a tuple of feature (sample_x) and label (sample_y) sample_x, sample_y = next(iter(train_loader)) # Since our model was sent to device, we need to do the same with the data. # Even here, both model and data need to be on the same device! writer.add_graph(model, sample_x.to(device))



writer.add_scalars( main_tag='loss', tag_scalar_dict={'training': loss, 'validation': val_loss}, global_step=epoch )

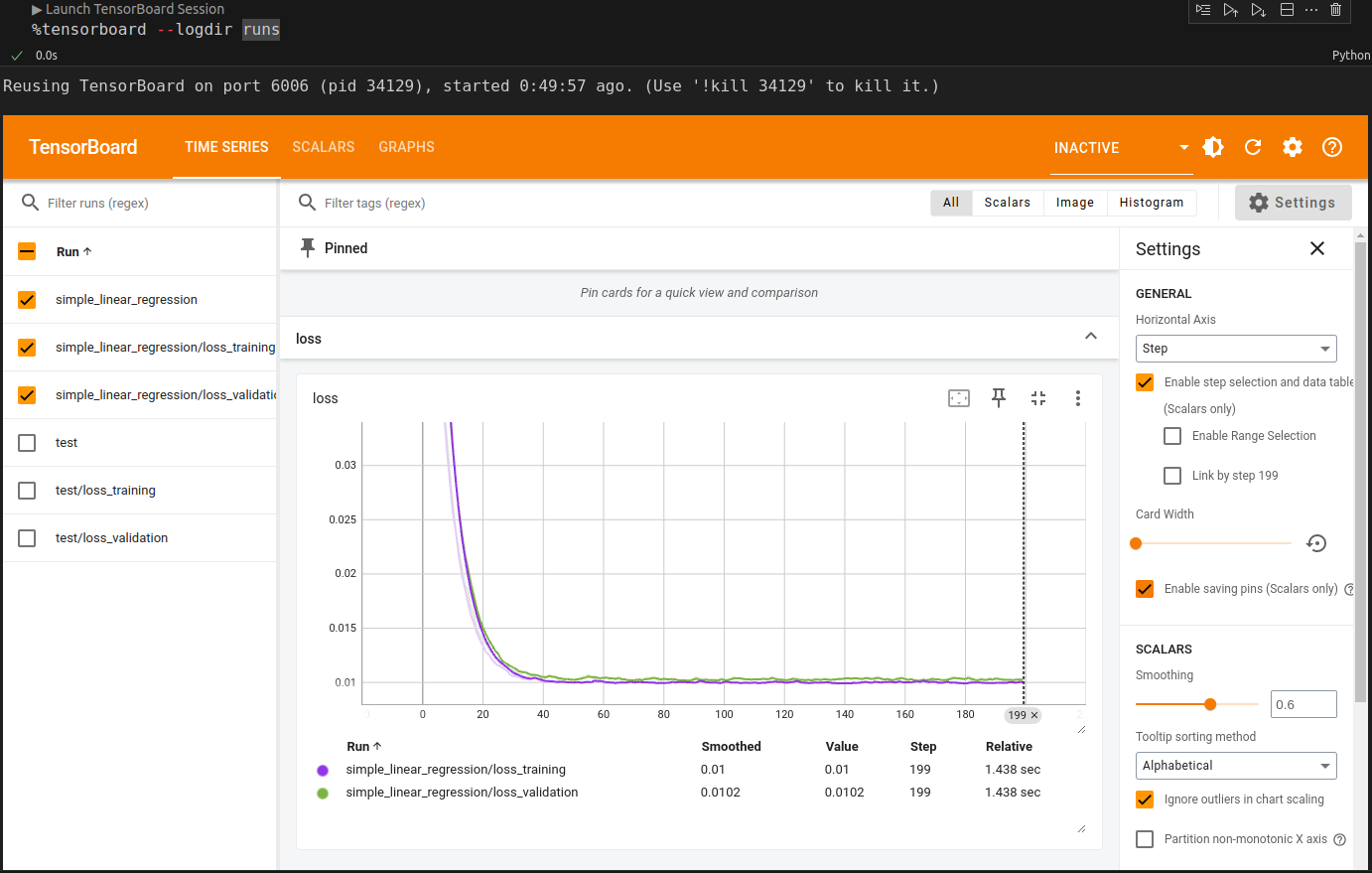
%%writefile model_configuration/v3.py device = 'cuda' if torch.cuda.is_available() else 'cpu' lr = .1 torch.manual_seed(42) model = nn.Sequential(nn.Linear(1, 1)).to(device) optimizer = torch.optim.SGD(model.parameters(), lr=lr) loss_fn = nn.MSELoss(reduction='mean') train_step_fn = make_train_step_fn(model, loss_fn, optimizer) val_step_fn = make_val_step_fn(model, loss_fn) # Create a Summary Writer to interface with TensorBoard writer = SummaryWriter('runs/simple_linear_regression') # Fetch a single mini-batch so we can use add_graph x_sample, y_sample = next(iter(train_loader)) writer.add_graph(model, x_sample.to(device))
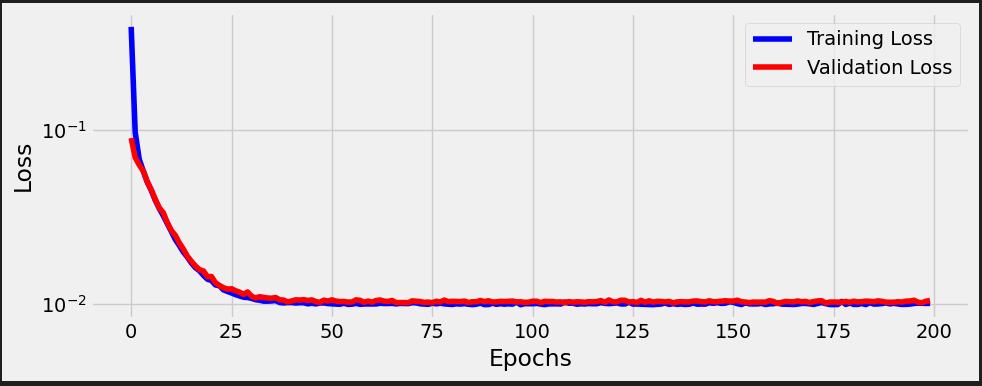
%%writefile model_training/v5.py n_epochs = 200 losses = [] val_losses = [] for epoch in range(n_epochs): loss = mini_batch(device, train_loader, train_step_fn) losses.append(loss) with torch.no_grad(): val_loss = mini_batch(device, val_loader, val_step_fn) val_losses.append(val_loss) # Record both losses for each epoch under the main tag "loss" writer.add_scalars( main_tag='loss', tag_scalar_dict={'training': loss, 'validation': val_loss}, global_step=epoch, ) # Close the writer writer.close()



checkpoint = {'epoch': n_epochs,
'model_state_dict': model.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
'losses': losses,
'val_losses': val_losses}
torch.save(checkpoint, 'model_checkpoint.pth')
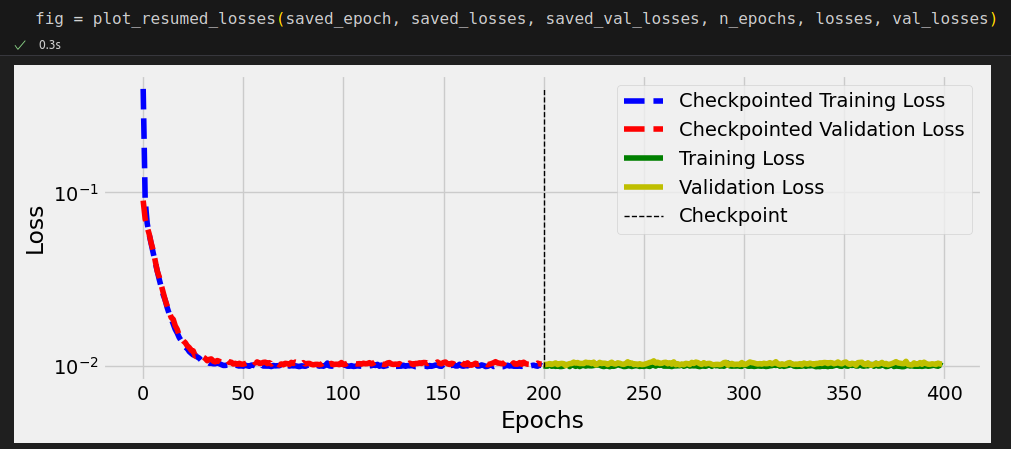
checkpoint = torch.load('model_checkpoint.pth') model.load_state_dict(checkpoint['model_state_dict']) optimizer.load_state_dict(checkpoint['optimizer_state_dict']) saved_epoch = checkpoint['epoch'] saved_losses = checkpoint['losses'] saved_val_losses = checkpoint['val_losses'] model.train() # always use TRAIN for resuming training
/tmp/ipykernel_34025/23490277.py:1: FutureWarning: You are using `torch.load` with `weights_only=False` (the current default value), which uses the default pickle module implicitly. It is possible to construct malicious pickle data which will execute arbitrary code during unpickling (See https://github.com/pytorch/pytorch/blob/main/SECURITY.md#untrusted-models for more details). In a future release, the default value for `weights_only` will be flipped to `True`. This limits the functions that could be executed during unpickling. Arbitrary objects will no longer be allowed to be loaded via this mode unless they are explicitly allowlisted by the user via `torch.serialization.add_safe_globals`. We recommend you start setting `weights_only=True` for any use case where you don't have full control of the loaded file. Please open an issue on GitHub for any issues related to this experimental feature.
checkpoint = torch.load('model_checkpoint.pth')
Sequential(
(0): Linear(in_features=1, out_features=1, bias=True)
)






checkpoint = torch.load('model_checkpoint.pth') model.load_state_dict(checkpoint['model_state_dict']) print(model.state_dict()) # OrderedDict({'0.weight': tensor([[2.0169]], device='cuda:0'), '0.bias': tensor([0.9978], device='cuda:0')})

new_inputs = torch.tensor([[.20], [.34], [.57]]).to(device) model.eval() # always use EVAL for fully trained models model(new_inputs)
tensor([[1.4012],
[1.6835],
[2.1474]], device='cuda:0', grad_fn=<AddmmBackward0>)
# %load data_preparation/v2.py torch.manual_seed(13) # Build tensors from numpy arrays BEFORE split x_tensor = torch.from_numpy(x).float().reshape(-1, 1) y_tensor = torch.from_numpy(y).float().reshape(-1, 1) # Build dataset containing ALL data points dataset = TensorDataset(x_tensor, y_tensor) # Perform split ratio = .8 n_total = len(dataset) n_train = int(n_total * ratio) n_val = n_total - n_train train_data, val_data = random_split(dataset, [n_train, n_val]) # Build a loader for each set train_loader = DataLoader(dataset=train_data, batch_size=16, shuffle=True) val_loader = DataLoader(dataset=val_data, batch_size=16)
# %load model_configuration/v3.py device = 'cuda' if torch.cuda.is_available() else 'cpu' lr = .1 torch.manual_seed(42) model = nn.Sequential(nn.Linear(1, 1)).to(device) optimizer = torch.optim.SGD(model.parameters(), lr=lr) loss_fn = nn.MSELoss(reduction='mean') train_step_fn = make_train_step_fn(model, loss_fn, optimizer) val_step_fn = make_val_step_fn(model, loss_fn) # Create a Summary Writer to interface with TensorBoard writer = SummaryWriter('runs/simple_linear_regression') # Fetch a single mini-batch so we can use add_graph x_sample, y_sample = next(iter(train_loader)) writer.add_graph(model, x_sample.to(device))
# %load model_training/v5.py n_epochs = 200 losses = [] val_losses = [] for epoch in range(n_epochs): loss = mini_batch(device, train_loader, train_step_fn) losses.append(loss) with torch.no_grad(): val_loss = mini_batch(device, val_loader, val_step_fn) val_losses.append(val_loss) # Record both losses for each epoch under the main tag "loss" writer.add_scalars( main_tag='loss', tag_scalar_dict={'training': loss, 'validation': val_loss}, global_step=epoch, ) # Close the writer writer.close()



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律