

并行算法的设计基础
并行算法的定义和分类
- 并行算法:一些可同时执行的诸进程的集合,这些进程互相作用和协调动作从而达到给定问题的求解。
并行算法分类
- 数值计算与非数值计算
- 同步算法和异步算法
- 分布算法
- 确定算法和随机算法
并行算法的表达
描述语言
- 可以使用类Algol、类Pascal等。
- 在描述语言中引入并行语句。
并行算法的复杂性度量
串行算法的复杂性度量
- 最坏情况下的复杂度(Worst-CASE Complexity)
- 期望复杂度(Expected Complexity)
并行算法的复杂性度量
- 运行时间t(n):包含计算时间和通信时间,分别用计算时间步和选路时间步作单位。n为问题实例的输入规模。
- 处理器数p(n)
- 并行算法成本c(n):c(n)=t(n)p(n)
- 总运算量W(n):并行算法求解问题时所完成的总的操作步数。
Brent定理
令W(n)是某并行算法A在运行时间T(n)内所执行的运算量,则A使用p台处理器可在t(n)=O(W(n)/p+T(n))时间内执行完毕。
- W(n)和c(n)密切相关
- P=O(W(n)/T(n))时,W(n)和c(n)两者是渐进一致的
- 对于任意的p,c(n)>W(n)
并行算法中的同步和通讯
同步
- 同步是在时间上强使各执行进程在某一点必须互相等待
- 可用软件、硬件和固件的方法来实现
通讯
- 共享存储多处理器使用:global read(X,Y)和global write(X,Y)
- 分布存储多计算机使用:send(X,i)和receive(Y,j)
并行计算模型
PRAM模型
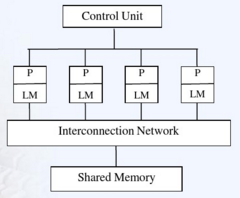
PRAM(Parallel Random Access Machine)模型是多指令流多数据流(MIMD)并行机中的一种具有共享存储的模型。
基本概念
- 由Fortune和Wyllie于1978年提出,又称SIMD-SM模型。有一个集中的共享存储器和一个指令控制器,通过SM(流多处理器)的R/W交换数据,隐式同步计算。
结构图
分类
(1)PRAM-CRCW并发度并发写
- CPRAM-CRCW(Common PRAM-CRCW):仅允许写入相同数据
- PPRAM-CRCW(Priority PRAM-CRCW):仅允许优先级最高的处理器写入
- APRAM-CRCW(Arbitrary PRAM-CRCW):允许任意处理器自由写入
(2)PRAM-CREW并发读互斥写
(3)PRAM-EREW互斥读互斥写
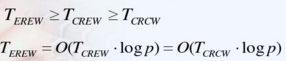
计算能力比较
- PRAM-CRCW是最强的计算模型,PRAM-EREW可logp倍模拟PRAM-CREW和PRAM-CRCW
优缺点
- 适合并行算法表示和复杂性分析,易于使用,隐藏了并行机的通讯、同步等细节
- 不适合MIMD并行机,忽略了SM的竞争、通讯延迟等因素。
异步APRAM模型
基本概念
- 又称分相(Phase)PRAM或MIMD-SM。每个处理器有其局部存储器、局部时钟、局部程序;无全局时钟,各处理器异步执行;处理器通过SM进行通讯;处理器间依赖关系,需在并行程序中显式地加入同步路障。
指令类型
- 全局读
- 全局写
- 局部操作
- 同步
计算过程
由同步障分开全局相组成
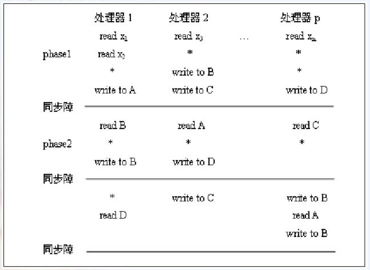
计算时间
- 设局部操作位单位时间;全局读/写平均时间为d,d随着处理器数目的增加而增加;同步路障时间为B=B(p)非降函数。
- 满足关系2≤d≤B≤p;B=B(n)=O(dlogp)或O(dlogp/logd)令tph为全局相内各处理器执行时间最长者,则APRAM上的计算时间为:T=∑tph+B×同步障次数
优缺点
- 易编程和分析算法的复杂度。
- 但与现实相差较远,其上并行算法非常有限,也不适合MIMD-DM模型。
BSP模型
基本概念
由Valiant(1990)提出的,“块”同步模型,是一种异步MIMD-DM模型,支持消息传递系统,块内异步并行,块间显式同步。
模型参数
- p:处理器数(带有存储器)
- l:同步障时间(Barrier synchronization time)
- g:带宽因子(time steps/packet)=1/bandwidth
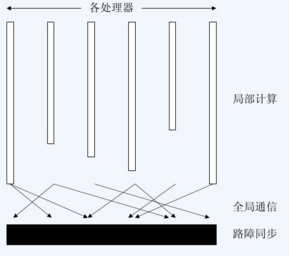
计算过程
由若干超级步组成,每个超级步计算模式为下图:
优缺点
- 强调了计算和通讯的分离,提供了一个编程环境,易于程序复杂性分析。
- 但是需要显式同步机制,限制至多h条消息的传递等。
logP模型
基本概念
由Culler(1993)年提出的,是一种分布存储的、点到点通讯的多处理机模型,其中通讯由一组参数描述,实行隐式同步。
模型参数
- l:network latency
- o:communication overhead
- g:gap=1/bandwidth
- P:#processors
注:l和g反映了通讯网络的容量
优缺点
- 捕捉了MPC的通讯瓶颈,隐藏了并行机的网络拓扑、路由、协议,可以应用到共享存储、消息传递、数据并行的编程模型中。
- 但难以进行算法描述、设计和分析。
BSP vs. logP
- BSP→logP:BSP块同步→BSP子集同步→BSP进程对同步=logP
- BSP可以常数因子模拟logP,logP可以对数因子模拟BSP
- BSP=logP+Barriers-Overhead
- BSP提供了更方便的程设环境,logP更好地利用了机器资源
- BSP似乎更简单、方便和符合结构化编程
并行算法的一般设计方法
串行算法的直接并行化
算法设计方法描述
方法描述
- 发掘和利用现有串行算法中的并行性,直接将串行算法改造为并行算法。
评注
- 由串行算法直接并行化的方法是并行算法设计的最常用方法之一
- 不是所有的串行算法都可以直接并行化的
- 一个好的串行算法并不能并行化为一个好的并行算法
- 许多数值串行算法可以并行化为有效的数值并行算法
例:快排序算法的并行化
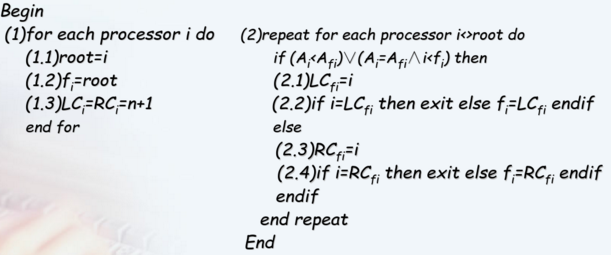
算法:PRAM-CRCW上的快排序二叉树构造算法
输入:序列(A1,...,An)和n个处理器
输出:供排序用的一颗二叉排序数
从问题描述开始设计并行算法
方法描述
- 从问题本身描述出发,不考虑相应的串行算法,设计一个全新的并行算法。
评注
- 挖掘问题的固有特性与并行的关系
- 设计全新的并行算法是一个挑战性和创造性的工作
- 利用串的周期性的PRAM-CRCW算法是一个很好的范例
借用已有的算法求解新问题
方法描述
- 找出求解问题和某个已解决问题之间的联系
- 改造或利用已知算法应用到求解问题上
评注
- 这是一项创造性的工作
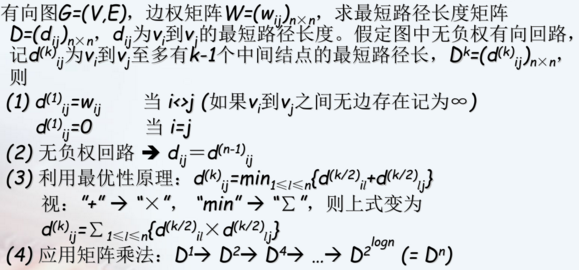
- 使用矩阵乘法算法求解所有点对间最短路径是一个很好的范例
利用矩阵乘法求所有点对间最短路径
计算原理
并行算法的基本设计技术
划分设计技术
- 均匀划分技术
- 方根划分技术
- 对数划分技术
- 功能划分技术
分治设计技术
并行分治设计步骤
- 将输入划分成若干个规模相等的子问题
- 同时(并行地)递归求解这些子问题
- 并行地归并子问题的解,直至得到原问题的解
双调归并网络
平衡数设计技术
设计思想
- 以树的叶节点为输入,中间节点为处理节点,由叶向根或由根向叶逐层进行并行处理。
倍增设计技术
设计思想
- 又称指针跳跃(pointer jumping)技术,特别适合于处理链表或有向树之类的数据结构
- 当递归调用时,所要处理数据之间的距离逐步加倍,经过k步后即可完成距离为2k的所有数据的计算
流水线设计技术
设计思想
- 将算法流程划分成p个前后衔接的任务片段,每个任务片段的输出作为下一个任务片段的输入
- 所有任务片段按同样的速率产生出结果
评注
- 流水线技术是一种广泛应用在并行处理中的技术
- 脉动算法(Systolic algorithm)是其中一种流水线技术
并行算法的一般设计过程
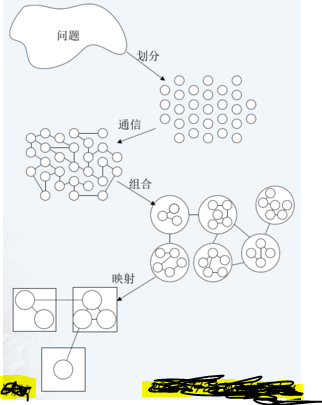
PCAM设计方法学
设计并行算法的四个阶段:
- 划分(Partitioning):分解成小的任务,开拓并发性
- 通讯(Communication):确定诸任务间的数据交换,监测划分的合理性
- 组合(Agglomeration):依据任务的局部性,组合成更大的任务
- 映射(Mapping):将每个任务分配到处理器上,提高算法的性能
PCAM设计过程
划分
划分的方法描述
- 充分开拓算法的并发性和可扩展性
- 先进行数据分解(称域分解),再进行计算功能的分解(称功能分解)
- 使数据集和计算集互不相交
- 划分阶段忽略处理器数目和目标机器的体系结构
- 能分为两类划分:①域分解(domain decomposition);②功能分解(functional decomposition)
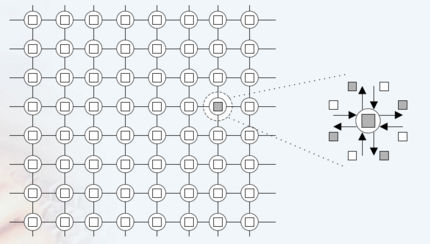
域分解
- 划分的对象是数据,可以是算法的输入数据、中间处理数据和输出数据
- 将数据分解成大致相等的小数据片
- 划分时考虑数据上的相应操作
- 如果一个任务需要别的任务中的数据,则会产生任务间的通讯
功能分解
- 划分的对象是计算,将计算划分为不同的任务,其出发点不同于域分解
- 划分后,研究不同任务所需的数据。如果这些数据不相交的,则划分是成功的;如果数据有相当的重叠,意味着要重新进行域分解和功能分解
- 功能分解是一种更深层次的分解
划分依据
- 划分是否具有灵活性?
- 划分是否避免了冗余计算和存储?
- 划分任务尺寸是否大致相当?
- 任务数与问题尺寸是否成比例?
- 功能分解是一种更深层次的分解,是否合理?
通讯
通讯方法描述
- 通讯是PCAM设计过程的重要阶段
- 划分产生的诸任务,一般不能完全独立执行,需要在任务间进行数据交流;从而产生了通讯
- 功能分解确定了诸任务之间的数据流
- 诸任务是并发执行的,通讯则限制了这种并发性
四种通讯模式
- 局部/全局通讯
- 结构化/非结构化通讯
- 静态/动态通讯
- 同步/异步通讯
通讯判据
- 所有任务是否执行大致相当的通讯?
- 是否尽可能的局部通讯?
- 通讯操作是否能并行执行?
- 同步任务的计算能否并行执行?
组合
方法描述
- 组合是由抽象到具体的过程,是将组合的任务能在一类并行机上有效的执行
- 合并小尺寸任务,减少任务数。如果任务数恰好等于处理器数,则也完成了映射过程
- 通过增加任务的粒度和重复计算,可以减少通讯成本
- 保持映射和扩展的灵活性,降低软件工程成本
表面-容积效应
- 通讯量与任务子集的表面成正比,计算量与任务子集的体积成正比
- 增加重复计算有可能减少通讯量
重复计算
- 重复计算减少通讯量,但增加了计算量,应保持恰当的平衡
- 重复计算的目标应减少算法的总运算时间
组合判据
- 增加粒度是否减少了通讯成本?
- 重复计算是否已权衡了其得益?
- 是否保持了灵活性和可扩展性?
- 组合的任务数是否与问题尺寸成比例?
- 是否保持了类似的计算和通讯?
- 有没有减少并行执行的机会?
映射
方法描述
- 每个任务要映射到具体的处理器,定位到运行机器上
- 任务数大于处理器数时,存在负载平衡和任务调度问题
- 映射的目标:减少算法的执行时间(并行的任务→不同的处理器;任务之间存在高通讯的→同一处理器)
- 映射实际是一种权衡,属于NP完全问题
负载平衡算法
- 静态的:事先确定
- 概率的:随机确定
- 动态的:执行期间动态负载
- 基于域分解的:递归对剖;局部算法;概率方法;循环映射
任务调度算法
- 任务放在集中的或分散的任务池中,使用任务调度算法将池中的任务分配给特定的处理器
映射判据
- 采用集中式负载平衡方案,是否存在通讯瓶颈?
- 采用动态负载平衡方案,调度策略的成本如何?
参考文献
https://wenku.baidu.com/view/b183017a1ed9ad51f01df2d7.html?rec_flag=default&sxts=1542421861193
https://wenku.baidu.com/view/17709aca3186bceb19e8bbd4.html?rec_flag=default&sxts=1542421875283
https://wenku.baidu.com/view/b994bbf6998fcc22bcd10dd7.html?rec_flag=default&sxts=1542421883056
进步是留给时间最美的礼物

