支持向量机
支持向量机
一、线性模型

找一个平面,向上或向下评选移动该平面,使之擦过一些向量,将距离 \(d\) 定义为此平面的优化量度,使 \(d\) 尽可能的大,\(d\) 叫做间距(margin),擦过的向量叫做支持向量(support vectors),即$ B_8$ 和 \(A_5\)。
设空间有 \(N\) 个向量 \(x_1,x_2,...x_N\),它们要么属于 \(c_1\) 类,要么属于 \(c_2\) 类。即,
- 优化问题
最小化(Minimize): \(\frac{1}{2}||\omega||^2\)
限制条件(Subject to):\(y_i[\omega^Tx_i+b]\geq 1(i=1,2,...N)\)
那么优化问题为什么要最小化 \(\frac{1}{2}||\omega||^2\) 呢?首先先了解两个“事实”。
(1)若 \(\omega^T+b=0\) 表示一个平面,那么 \(a\omega^T+ab=0\) 在 \(a\in R^+\)(正实数) 的情况下表示的平面是同一个平面。
(2)点 \((x_0,y_0)\) 到平面 \(\omega_1x+\omega_2y+b=0\) 的距离 \(s=\frac{|\omega_1x_0+\omega_2y_0+b|}{\sqrt{\omega_1^2+\omega_2^2}}\),那么根据推广可知,向量 \(x_0\) 到超平面 \(\omega^Tx+b=0\) 的距离为 \(d=\frac{\omega^Tx_0+b}{||\omega||}(||\omega||=\sqrt{\omega_x^2+\omega_2^2+...+\omega_N^2})\)。
我们可以用 \(a\) 去缩放 \((\omega,b)\rightarrow (a\omega,ab)\) ,使得 \(|\omega_*^Tx_0+b_*|=1\),那么此时,间隔 \(d=\frac{1}{||\omega||}\) ,我们的目的是使得 \(d\) 尽可能的大,那么根据距离公式,可以使 \(||\omega||^2\) 最小化(\(\frac{1}{2}\) 是为了求导方便,没有实际意义)以达到目的。
扩展:上述优化问题是凸优化问题(也叫二次规划),特点是要么无解,要么只有一个极值。定义为
(1)目标函数是二次项。
(2)限制条件是一次项。
二、非线性模型
在线性不可分的情况下,优化问题可以写成:
最小化:\(\frac{1}{2}||\omega||+C\sum_{i=1}^{N}\delta_i\)
限制条件:(1)\(\delta_i\geq0\);(2)\(y_i[\omega^Tx_i+b]\geq 1-\delta_i(i=1,2,...,N)\)
注意:
(1)\(C\)是常数,是事先设定好的,为了平衡权重。\(\omega,b,\delta_i(i=1,2,...,N)\) 为待求变量。
(2)此优化问题(也是凸优化)对任意点集,无论是否线性可分都有解。
支持向量机处理非线性情况是通过将向量 \(x\) 映射到高维空间,再用线性方式去分开。通俗的说,在低纬空间线性不可分,那么在高维有很大的概率能够线性可分。例如异或问题是线性不可分的。
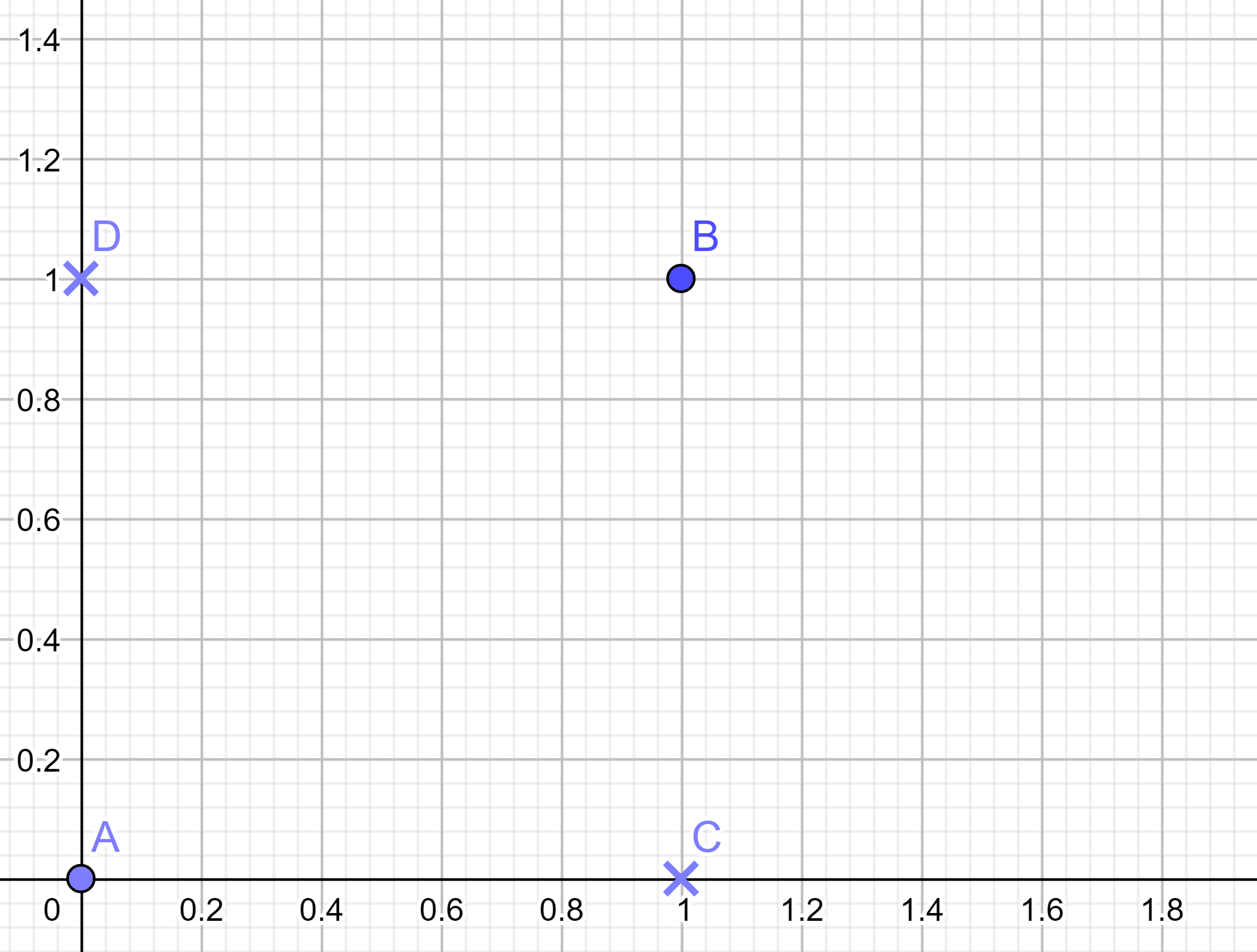
设 \(A=\left[\begin{matrix} 0\\ 0 \end{matrix} \right] \in c_1 ,\quad B=\left[\begin{matrix} 1\\ 1 \end{matrix} \right] \in c_1 ,\quad C=\left[\begin{matrix} 1\\ 0 \end{matrix} \right] \in c_2 ,\quad D=\left[\begin{matrix} 0\\ 1 \end{matrix} \right] \in c_2\) ,让 \(x\) 通过 \(\varphi(x)\) 变换映射到高维空间。即
那么
那么可以找到一组解使其线性可分,即
代入式子可得如下式子,显然线性可分。
当 \(\varphi(x)\) 接近无限维度时,线性可分的概率会接近到1,对于此问题,只需要修改 SVM 中 \(x\) 为\(\varphi(x)\) 即可。
最小化:\(\frac{1}{2}||\omega||+C\sum_{i=1}^{N}\delta_i\)
限制条件:(1)\(\delta_i\geq0\);(2)\(y_i[\omega^T\varphi(x_i)+b]\geq 1-\delta_i(i=1,2,...,N)\)
\(\varphi(x)\) 这会是一个非常复杂的式子。其实我们不需要知道 \(\varphi(x)\) 的显示表达也可以计算。我们只需要知道一个核函数(kernel function),即 \(k(x_1,x_2)=\varphi(x_1)^T\varphi(x_2)\) 就可以了。
- 常用的核函数有如下:
| 名称 | 表达式 |
|---|---|
| 线性核 | \(k(x_i,x_j)=x_i^Tx_j\) |
| 多项式核 | \(k(x_i,x_j)=(x_i^Tx_j)^d\) |
| 高斯核 | $k(x_i,x_j)=exp(-\frac{ |
| sigmoid核 | \(k(x_i,x_j)=tanh(\beta x^T_ix_j +\theta)\) |
\(Mercer's \quad Theorem\) :核函数 \(k(x_1,x_2)\) 可拆分为 \(\varphi(x_1)^T \varphi(x_2)\) 的充分条件为:对任意函数 \(\varphi(x)\) 满足 :
\[(1)\quad k(x_1,x_2)=k(x_2,x_1)(交换律) \quad;\quad(2)\quad \forall c_i,x_i(x=1...N),\sum_{i=1}^{N}\sum_{j=1}^{N}c_ic_jk(x_i,x_j) \geq 0(半正定性) \]
- 原问题(Prime Problem)与对偶问题(Dual Problem)
(1)原问题:
最小化(Minimize): \(f(\omega)\)
限制条件(Subject to): \(g_i(\omega) \le 0(i=1,2...K) \quad ;\quad h_i(\omega)=0(i=1,2,...M)\)
(2)对偶问题:
定义:\(L(\omega,\alpha,\beta) = f(w)+\sum_{i=1}^{K}\alpha_ig_i(\omega)+\sum_{i=1}^{M}\beta_i h_i(\omega)=f(\omega)+\alpha^Tg(\omega)+\beta^Th(\omega)\)
最大化(Maximize): \(\theta(\alpha,\beta) = inf_{定义域内所有的\omega}L(\omega,\alpha,\beta)\)
\((inf即求最小值,该式是在\alpha,\beta 固定下,遍历\omega,求最小值)\)
限制条件(Subject to): $\alpha_i \ge 0(i=1,2,...K) $
(3)定理1:如果 \(\omega^*\) 是原问题的解,而 \(\alpha^*,\beta^*\) 是其对偶问题的解,则有 \(f(\omega^*) \ge \theta(\alpha^*,\beta^*)\)
证明:
\[\begin{aligned} \theta(\alpha^*,\beta^*) & = inf_{定义域内所有的\omega}L(\omega^*,\alpha^*,\beta^*)\\ &\le L(\omega^*,\alpha^*,\beta^*) \\ &=f(\omega^*)+\underbrace{\alpha^{*T}}_{\ge0} \underbrace{g(\omega^*)}_{\le0}+\beta^{*T}\underbrace{h(\omega^*)}_{=0} \\ &\le f(\omega^*) \end{aligned} \]\(G = f(\omega^*) - \theta(\alpha^*,\beta^*) \ge0\) 叫原问题与对偶问题的间距(Duality Gap)。
注意:如果 \(f(\omega^*) = \theta(\alpha^*,\beta^*)\),必能推出对于所有的 \(i=1-K,\alpha_i^* = 0 或 g_i^*(\omega^*)=0\) ,此为 \(KKT\) 条件。
(4)定理2(强对偶定理):如果 \(g(\omega) = A\omega +b,h(\omega) = C\omega+d,f(\omega)\) 为凸函数,则 \(f(\omega^*) = \theta(\alpha^*,\beta^*)\),即间距为0。
凸函数定义是\(\forall \omega_1,\omega_2\),有 \(f(\lambda\omega_1+(1-\lambda)\omega_2)\le\lambda f(\omega_1)+(1-\lambda)f(\omega_2) \quad \lambda\in[0,1]\)
- 支持向量机(原问题与对偶问题)
(1)原问题
最小化:\(\frac{1}{2}||\omega||-C\sum_{i=1}^{N}\delta_i\)
限制条件:(1)\(\delta_i\le0\);(2)\(1+\delta_i-y_i\omega^T\varphi(x_i)+y_ib\le 0(i=1,2,...,N)\)
(2)对偶问题
最大化 \(\theta(\alpha,\beta) = inf_{所有 \omega,\delta_i,b}\frac{1}{2}||\omega||^2-C\sum_{i=1}^{N}\delta_i+\sum_{i=1}^N\beta_i\delta_i+\sum_{i=1}^N\alpha_i[1+\delta_i-y_i\omega^T\varphi(x_i)+y_ib]\)
限制条件:(1)\(\alpha_i\ge0(i=1,2,...,N)\);(2)\(\beta_i\ge0(i=1,2,...,N)\)
现在的待求参数是 \(\omega ,\delta_i ,b\),对其求偏导,并等于0处取得最优值。
\[\begin{aligned} &\frac{\partial \theta}{\partial \omega} = \omega-\sum_{i=1}^{N}\alpha_i\varphi(x_i)y_i=0\Longrightarrow \omega=\sum_{i=1}^{N}\alpha_i\varphi(x_i)y_i \qquad (1) \\ &\frac{\partial \theta}{\partial \delta_i}=-C+\beta_i+\alpha_i=0\Longrightarrow \alpha_i+\beta_i=C \qquad (2) \\ &\frac{\partial \theta}{\partial b} = -\sum_{i=1}^N\alpha_iy_i=0\Longrightarrow\sum_{i=1}^N\alpha_iy_i =0\qquad(3) \end{aligned} \]
把(1)(2)(3)代入后的对偶问题为
最大化:
\(\theta(\alpha,\beta)=\sum_{i=1}^N-\frac{1}{2}\sum_{i=1}^N\sum_{j=1}^{N}y_iy_j\alpha_i\alpha_j\varphi(x_i)^T\varphi(x_j)=\sum_{i=1}^N-\frac{1}{2}\sum_{i=1}^N\sum_{j=1}^{N}y_iy_j\alpha_i\alpha_jk(x_i,x_j)\)
限制条件:
(1)\(0\le\alpha_i\le C(因为\beta_i\ge0且\beta_i=C-\alpha_i,所以 \alpha_i \le C,i=1,2,...,N)\);
(2)\(\sum_{i=1}^{N}\alpha_iy_i=0(i=1,2,...,N)\)
这也是一个二次规划问题,解此问题时,由于 \(\varphi(x_i)^T\varphi(x_j)=k(x_i,x_j)\),我们只需要知道核函数,不需要知道 \(\varphi(x)\) 的具体表达。现在我们计算 \(\omega^T\varphi(x_i) +b\)。
首先计算 \(\omega^T \varphi(x_i)\),根据(1)式子可得 \(\omega^T \varphi(x_i) = \sum_{j=1}^{N}y_j\alpha_j\varphi(x_j)^T\varphi(x_i)=\sum_{j=1}^{N}y_j\alpha_jk(x_j,x_i)\)
然后算 \(b\),根据KKT条件,对于所有 \(i(i=1,2...N)\) 有 \(\alpha_i[1+\delta_i-y_i\omega^T\varphi(x_i)+y_ib] = 0\) 且 \(\beta_i\delta_i = 0 \Longrightarrow(C-\alpha_i)\delta_i = 0\),如果对于某一个 \(i,\alpha_i \not=0,且\alpha_i \not=C\),则必有 \(\delta_i=0(由\beta_i\not=0推出)\),\(1+\delta_i-y_i\omega^T\varphi(x_i)+y_ib=0(由\alpha_i\not=0推出)\),因此 \(b\) 的值为
\[b=\frac{1-y_i\omega^T\varphi(x_i)}{y_i} =\frac{1-y_i\sum_{j=1}^N\varphi_jy_jk(x_i,x_j)}{y_i} \]
最后,我们可以对测试样本 \(x\) 进行判断,即

【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】凌霞软件回馈社区,博客园 & 1Panel & Halo 联合会员上线
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】博客园社区专享云产品让利特惠,阿里云新客6.5折上折
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步