RAMPS1.4 3d打印控制板接线与测试
“工欲善其事,必先利其器”,在开始工作之前,你应该准备下面所说的工具(包括软件和硬件)。
1、需要下载的软件
1.1 固件上传工具——Arduino IDE
这是上传固件的必备工具,有了这个软件让上传固件变的容易很多,插上USB,就可以轻松上传。
下载地址:
windows版本:http://downloads.arduino.cc/arduino-1.5.5-windows.exe
MAC版本:http://downloads.arduino.cc/arduino-1.5.5-macosx.zip
linux 32位版本:http://downloads.arduino.cc/arduino-1.5.5-linux32.tgz
linux 64位版本:http://downloads.arduino.cc/arduino-1.5.5-linux64.tgz
更多其它版本:Arduino官网 
1.2 3d打印切片软件——Slic3r
这个软件是生产3d打印机能够识别的控制代码的必备工具。没有它,3d打印机将不能识别3d模型的格式。只有通过这个软件转化为G代码后,打印机才可以正常使用。而Slic3r是一个非常优秀的切片工具。
下载地址:
windows 32位版:http://dl.slic3r.org/win/slic3r-mswin-x86-1-0-1-stable.zip
windows 64位版:http://dl.slic3r.org/win/slic3r-mswin-x64-1-0-1-stable.zip
MAC版本:http://dl.slic3r.org/mac/slic3r-osx-uni-1-0-1-stable.dmg
linux 32位版本:http://dl.slic3r.org/linux/slic3r-linux-x86-1-0-1-stable.tar.gz
linux 64位版本:http://dl.slic3r.org/linux/slic3r-linux-x86_64-1-0-1-stable.tar.gz
如果你想通过源代码自己编译,请参考:slic3r
1.3 3d打印机控制软件(上位机)——Printrun
reprap官方上位机,界面简单,操作方便,是新手不错的选择。它是3d打印机的控制中心,它会不停的读取计算机上的G代码文件(由上面的切片软件生成),然后通过usb线传输给3d打印机主控板(mega2560)从而实现对打印机的精确控制。
下载地址:
MAC版本:http://koti.kapsi.fi/~kliment/printrun/Printrun-Mac-10Mar2014.zip
windows版本:http://koti.kapsi.fi/~kliment/printrun/Printrun-Win-Slic3r-10Mar2014.zip
更多版本选择:Printrun
1.4 固件——Marlin
固件是安装在mega2560板子上的软件,功能强大的Marlin是不错的选择。
下载地址:https://github.com/ErikZalm/Marlin/archive/Marlin_v1.zip
下载后解压后,marlin文件夹里的所有文件就是固件的源代码,找到里面的pde或ino文件用IDE软件打开即可。
2、安装驱动
MAC和linux系统都不需要为mega 2560安装特定驱动,插上usb就可以使用了,由于mega 2560板子实际上是usb转串口,所以插上后如果正常,会多了一个串口出来。
如果是STduino 版本的Mega2560,由于我们的STduino是Arduino的升级版本,所以驱动不相同,请到:
windows: http://vdisk.weibo.com/s/dt1ol2fScebl
Mac osx: Mac OSX
Linux: Linux 3.x.x ,Linux 2.6.x
下载安装。
2.1 windows操作系统安装驱动
当你安装好Arduino IDE后,来到IDE的目录,里面有一个driver文件夹,进去后找mega2560 r3字样的inf文件,如果找不到,这个目录下应该会有一个压缩文件,解压后就可以找到这个文件了,右键安装就可以了。这时插上mega2560板子,应该是可识别的设备了。
3、工具及配件
DIY 3d打印机没有必要的工具,几乎是不可能完成的,当然必要的配件也是必须的。
3.1 常用工具
在测试或安装3d打印机套件时,可能会用到的工具包括有,一字螺丝刀、剥线钳、压线钳、电烙铁、镊子、片口、尖嘴钳、高温胶带等等。配套4
3.2 配件
一台完整的3d打印机是由几十个甚至上百个零件组合而成。如果想完成下面的测试或组成一台打印机,你应该有一下零件:
- 3d打印机主控套件:主要包含一个mega 2560主控板,一个RAMPS1.4拓展板和4个4988步进电机驱动板;
- 12V 200W开关电源:用于提供12V电压,可以使用电脑上的ATX电源,但接线时需要注意;
- 2个100k ntc热敏电阻:为了实现控制板对加热头及加热床的温度控制,需要有两个温度传感器,最方便的莫过于ntc 热敏电阻,100k电阻是不错的选择(大部分固件直接支持);
- 至少一个两相四线步进电机:如果你是简单测试,只需要一个步进电机就可以完成轮流测试,如果你要组成一台成品,你需要4~5台步进电机,Z轴根据机械结构的不同有的采用两台电机驱动。电机型号需要根据你自己的情况选择,一般来说普通42电机都可以胜任,需要注意的是4988最大支持的驱动电流是2A;
- 至少一个限位开关:限位开关是打印机用来确定位置的重要传感器,要组成完整的打印机至少需要3个限位来帮助打印机确定原点位置,限位开关种类很多,可以是机械式的、光电的、磁性的(霍尔)等;
- 12V加热管:如果你的机械是FDM(热溶式打印机),那么加热管几乎是必须的,用在加热头上面,可以选择12V 40W的加热管。如果你紧紧是测试主控板是否正常,可以不需要,因为ramps板子上有led指示灯,知道是否在通电;
- 12V风扇:用于散热的风扇,没有太多需要说明的,需要注意的是风扇正负极必须接对,否则不会转,也可以仅仅通过led指示来判断是否工作;
- 12V加热床PCB板:为了让打印材料更容易粘在打印平台上,以及防止冷却变形(主要是ABS材料),如果打印PLA材料,该板子可以不需要,如果测试也可以只通过led来指示;
4、准备开始
如果你已经把上面的软件硬件都准备好了,那么就可以进入下一个环节了。
配置固件并上传固件
mega 2560板子在3d打印机中相当于大脑,控制这所有的3d打印配件来完成复杂的打印工作,但mega2560不能直接使用,需要上传(upload)固件(firmware)才可以使用。
1、下载固件——Marlin
由于Marlin固件的强大功能和简单易用,所以这里暂时只介绍Marlin固件。
Marlin原版下载地址(很多参数都需要自己配置):
我自己配置的Marlin固件大部分参数已经改好:http://vdisk.weibo.com/s/dt1ol2fSahCM
delta机型固件:http://vdisk.weibo.com/s/dt1ol2fSahjs
我的淘宝店铺:MakerLab
2、配置固件参数
如果你下载的是我提供的固件,那么大部分参数不需要调整,基本上烧入后就可以进行后面的工作了。但下面需要配置的参数还是知道比较好,免得因为固件配置有问题打印机而无法使用。没有提到的参数默认即可。#define BAUDRATE 250000这是配置串口波特率的,只有上位机波特率和固件波特率相同来能通讯成功,一定需要注意。当然也不能随便改,常见的波特率为:2400,9600,19200,38400,57600,115200,250000。在3d打印机中常用的是后3个。#define MOTHERBOARD 33 这个参数是配置板子类型的,3d打印机主控板类型非常多,每个板子的io配置不尽相同,所以这个参数必须要跟你自己的板子类型相同,否则无法正常使用。我的板子是RAMPS1.4版本,对应的配置应该为33(单打印头配置),和34(双打印头配置)。如果你使用的是其它板子,请参考旁边的注释并选择合适的配置。#define TEMP_SENSOR_0 1#define TEMP_SENSOR_BED 1这两个参数分别配置温度传感器的类型。这是读取温度是否正常的重要参数,如果读取的温度不正常将不能工作甚至有很大的潜在危险(烧毁器件等)。配置为1说明两个都是100K ntc热敏电阻。如果你使用了其它温度传感器需要根据情况自行更改。#define EXTRUDE_MINTEMP 170 这个参数是为了防止温度未达到而进行挤出操作时带来的潜在风险,如果你做其它3d打印机,比如有朋友做巧克力打印机,挤出温度只需要45度,那么这个参数需要配置为较低数值,比如40度。const bool X_ENDSTOPS_INVERTING = true;const bool Y_ENDSTOPS_INVERTING = true;const bool Z_ENDSTOPS_INVERTING = true; 这里的三个参数是配置3各轴的限位开关类型的,配置为true,限位开关默认状态输出为1,触发状态输出为0,也就是机械限位应该接常开端子。如果你接常闭端子,则将true改为false。#define INVERT_X_DIR false#define INVERT_Y_DIR true这两个参数是比较容易错的。根据自己机械的类型不通,两个的配置不尽相同。但是原则就是要保证原点应该在打印平台的左下角(原点位置为[0,0]),或右上角(原点位置为[max,max])。只有这样打印出来的模型才是正确的,否则会是某个轴的镜像而造成模型方位不对。参考下图坐标。
#define X_HOME_DIR -1#define Y_HOME_DIR -1#define Z_HOME_DIR -1 如果原点位置为最小值参数为-1,如果原点位置为最大值配置为1.#define X_MAX_POS 205#define X_MIN_POS 0#define Y_MAX_POS 205#define Y_MIN_POS 0#define Z_MAX_POS 200#define Z_MIN_POS 0 这几个参数是配置打印尺寸的重要参数,参考上面的坐标系图来填写,这里需要说明的是坐标原点并不是打印中心,真正的打印中心一般在[(x.max-x.min)/2,(y.max-y.min)/2]的位置。中心位置的坐标需要在后面的切片工具中使用到,打印中心坐标应该与这里的参数配置匹配,否则很可能会打印到平台以外。#define HOMING_FEEDRATE {50*60, 50*60, 4*60, 0} 配置回原点的速率,单位为毫米每分钟,如果你使用的是xy轴同步带传动,z轴螺杆传动,这个参数可以使用默认值。#define DEFAULT_AXIS_STEPS_PER_UNIT {85.3333, 85.3333,2560,158.8308} 这个参数是打印机打印尺寸是否正确的最重要参数,参数含义为运行1mm各轴所需要的脉冲数,分别对应x,y,z,e四轴。多数情况下这个数字都需要自己计算才可以。计算公式可以参考我的文章3d打印机各轴脉冲数计算方法。如果你不想自己计算可以用我的计算器:3d打印机脉冲数计算器
至此,最常用的参数都已经配置完成,可以开始使用了。
另外如果你使用了我的MINIPANEL lcd板子还需要改//#define MINIPANEL将前面的//删除掉才可以正常使用。
3、上传固件
上传之前,windows用户需要提前安装驱动。
配置板子类型:Tools > Board > Arduino Mega 2560 ,如图

配置串口: Tools > Serial Port > 你的mega板子对应串口号一般是最后一个,如果是windows系统,串口号一般是com3、com4、com8之类的形式。如图

点击对号按钮来检查是否有错误,如图

再点击向右的箭头按钮来上传固件,如图

上传过程中,2560板子上的TX RX 和L对应的三个led灯都会闪。如果不闪了,说明上传完成,如图
上传中...

上传完成提示

如果上传成功,你就可以进入下一个步骤了,如果上传中出现问题而无法上传,请查看IDE下方的提示框,确认是什么问题后进行进行解决再上传,常见错误板子类型选择错误,串口选择错误等。
RAMPS1.4 接线
RAMPS1.4作为mega2560的拓展板插在mega板子上面。从而让mega板子可以控制3d打印机的工作。ramps上的接线至关重要,接错不仅不能打印,甚至还会烧坏器件和板子。请一定注意。
我的淘宝店铺:http://makerlab.taobao.com
MakerLab有QQ群了,178177889,认证信息:3D打印
1、RAMPS1.4板子的功能分布
请参考示意图,为了防止接错,请再三确认以下几个方面后再通电,
* 电源正负极是否正确?
* RAMPS电源只接12V,没有5V接入。
* 4988驱动板确保没有插错位和颠倒(如果差错,通电就会烧板子)。
* 机械式限位开关只需要将开关上的com端和NO端接到板子的S(信号线)和-(负)两个位置即可。千万不要尝试将机械开关的三个段子都接在板子上。很可能会造成短路。
也可以参考下图: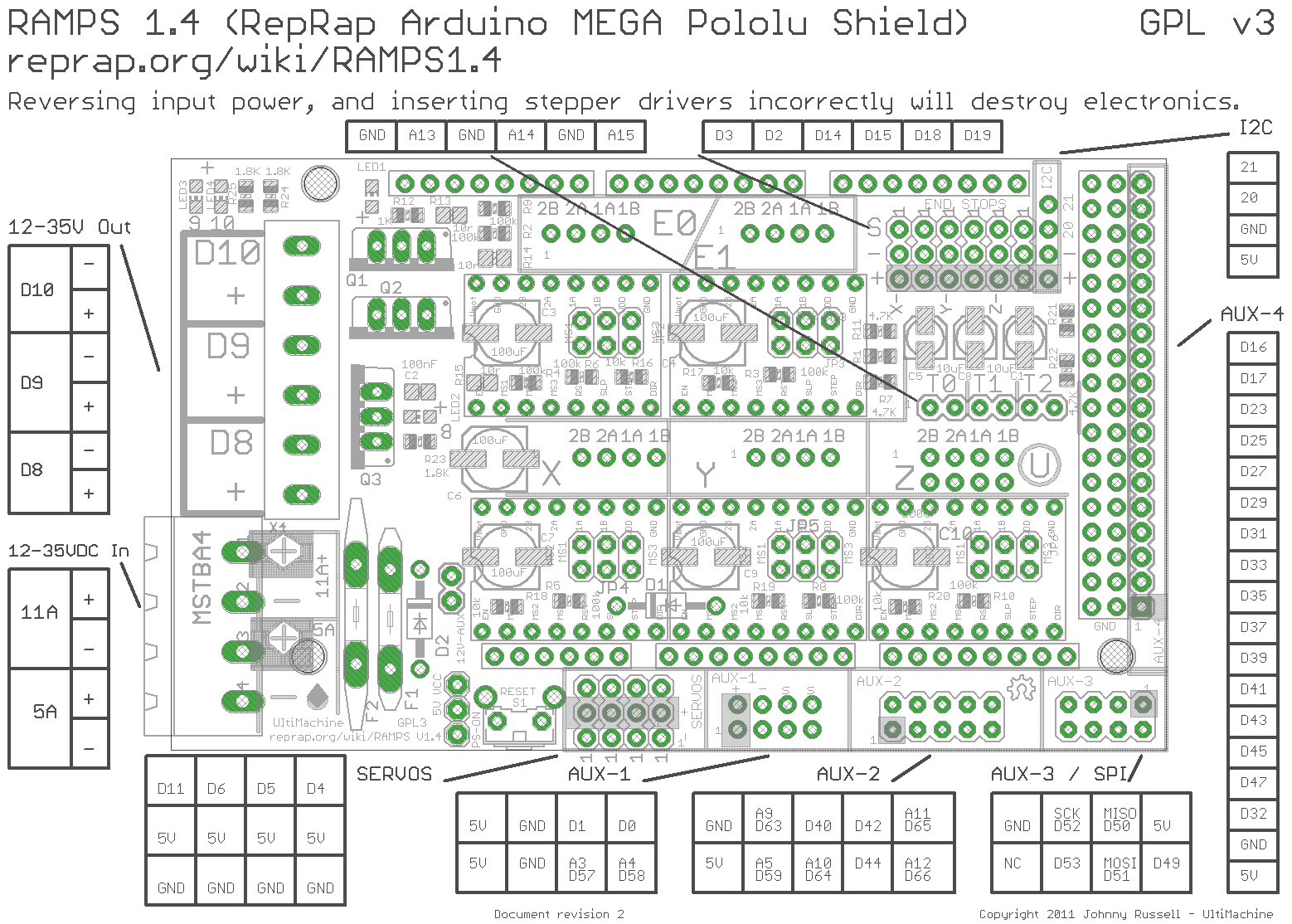
2、接线
我这里的接线并没有把所有应该接的东西都接上。而是只接了必须连接才可以进行测试的器件才连接了。如下图:

图中只用了一个电机来轮流测试各个轴是否正常,没有连接限位开关(需要根据你的固件配置进行调整,请参考上一部分固件配置里关于限位开关的说明),3个输出端只通过LED指示(如果接输出端加热棒等,热敏必须接在要跟对应的加热部分在一起,从而能够反馈温度,否则可能会烧坏加热部分),两个热敏直接连接,如果你有LCD板子需要接上LCD板子。
3、接线完成
最后,将ramps1.4插在mega2560板子上,注意不要接错位。在通电之前你应该仔细检查一下,免得有疏忽。接错了会导致后面的工作无法正常进行。如果都没问题了,可以接上USB线,和12V电源了。
连接上位机并做简单手动控制
如果之前的操作都顺利,现在就可以插上USB线,打开printrun上位机软件了。mega2560刚刚接通电源时,RAMPS板子上的LED1(绿色)会闪几下。这说明mega2560板子中的固件正在启动。
1、通过上位机连接板子
如上图,打开软件,选择正确的串口,设置正确的波特率(需要跟你固件中配置一致),点击connect。如果连接正常,右侧的提示区,会有类似下面的提示:
Connecting...
start
Printer is now online.
echo: External Reset
Marlin 1.0.0
echo: Last Updated: Sep 8 2013 15:04:20 | Author: (MakerLab, default config)
Compiled: Sep 8 2013
echo: Free Memory: 4260 PlannerBufferBytes: 1232
echo:Hardcoded Default Settings Loaded
并且,左侧的图形操作区变为可以操作的颜色。勾上温度曲线旁边的watch选项,可以实时获取温度情况,如下图。

2、查看温度是否正确(只接5V即可)
如果上面的操作都正确,你可以看到现在两个温度传感器的温度,并且温度应该为室温,手捏在上面可以看到温度的变化。如果你的温度读取到的为0度,请确保连接正确,依然有问题应检查固件中的相关参数。
3、测试三个输出端(需接12V)
接上12V电源,点击下图中标红位置的按钮,两个设置温度的按钮,一个风扇按钮(如果没有风扇打开按钮,可以在右侧输入M106 S255命令来实现)。如图:

如果这时RAMPS1.4上亮起了三个红色LED,那说明输出端测试成功。如下图:


4、测试电机及驱动(需接12V)
连接步进电机的4跟线到X轴电机输出端,如果你的电机导线颜色是标准颜色,可以用红-蓝-绿-黑的顺序连接,如果你的线颜色不标准或没有颜色区分,你需要通过电机说明书找到4跟线属于哪一相及哪一极,然后安装相B负-相B正-相A正-相A负的顺序连接(还有其它接线方式,请了解一下步进电机的原理)。
4.1 xyz三轴电机测试
点击上位机左侧的手动操作区域,进行对xyz三轴的测试。如果只有一个电机测试完应该轴后,再插到另一个轴上。

测试流程:
先电机某个轴的加+方向操作,电机应该往正方向运转;
再电机对应轴的负-方向操作,电机应该反转;
重复几次上面的操作。
需要注意的是,固件为了防止打印机撞车,小于最小位置和大于最大位置后电机就会停止运动。也就是说并不会一直加或减下去,电机都会转。
4.2 挤出机电机测试
由于固件不允许温度为达到最小挤出温度(固件中的参数)时执行挤出动作。所以如果你连接了真正的挤出机,并且有物料在里面,请不要在温度未达到230(abs)和185(pla)时进行挤出机测试。

测试方法:
1、将温度加热到物料对应的挤出温度,PLA:185度,ABS:230度,再进行测试,电机Extrude为挤出动作,Reverse为后退动作。如果所需要的方向跟实际方向相反,直接把所有的4跟电机导线反向即可。
2、如果你没有接挤出机,或挤出机中没有物料,可以不需要进行加热来测试。需要在右侧命令输入框中输入M302来允许冷挤出操作。这样就可以跟上面一样进行Extrude和Reverse测试了。
5、限位开关测试
RAMPS1.4最多共支持6个限位开关,分别是X-min,X-max,Y-min,Y-max,Z-min,Z-max。其中至少需要用到3个来确定打印机的原点,可以是一个轴的min或max位置的限位(由固件中做配置)。限位开关根据不同的形式接线方式也不同,机械式的限位开关只需要连接两个段子即可(负和信号),光电、霍尔式开关一般需要连接三个段子(正、负和信号)。
我这里测试用3个轴的min位置来做原点的配置方式。测试限位开关应该接在各轴的min位置上。然后电机测试轴的home按键,对应轴的电机应该开始转动,然后按下对应轴的限位开关两下(为了提高精度,碰到一次后返回几毫米再碰到才是真正的原点),此时电机应该停止转动。以上操作重复在其它轴上进行测试。
6、测试完成
如果上面的测试顺利完成,说明你可以开始把所有的东西安装在机构架子上了。需要注意各轴和各限位开关的对应关系。
常见问题
这里将总结比较常见的调试问题,和建议解决办法。请认真查看,以免漏掉关键信息导致不能使用。
自检
温度,温度很重要,如果温度不正常,太小或太大,整个打印机将出现错误,无法做任何操作(包括各轴步进电机的测试等)。
1、温度(热敏电阻)
RAMPS 1.4可以接3个热敏电阻分别是T0、T1和T2.多数情况下,只接T0和T1就够了,T0是加热头1(对应E0)的温度传感器接口,T1是加热床的接口。如果你的固件没有做过其它设置而是用的我配置的固件,请一定接好T0和T1,如果没有热敏电阻,可以用普通电阻代替,10K到100K的电阻都可以。然后接通USB线,打开上位机并连接,读取温度,如果两个温度读数大于0度小于230度,热床温度大于0度小于110度,就是正常的。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号