

PX4地标识别及控制算法
使用轮廓提取,多边形抽象,过滤面积较小的图形,然后过滤出四边形,再过滤掉非凸形。得到的四边形里通过简单的聚类方法寻找中心距离最近的一类,其中心的平均值即为地标中心
创建包
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_create_pkg landing roscpp rospy std_msgs geometry_msgs mavros
cd ~/catkin_ws/src/landing
mkdir msg #存放自定义消息类型
mkdir scripts #存放python脚本,打开相机
自定义消息类型
vi src/landing/msg/center.msg
uint32 width
uint32 height
float64 x
float64 y
bool iffind
python脚本
vi src/landing/scripts/track.py
import rospy
from std_msgs.msg import Header
from sensor_msgs.msg import Image
from landing.msg import center
import os
import cv2
import numpy as np
import time
center_publish=rospy.Publisher('/center', center, queue_size=1)
def callback(Image):
img = np.fromstring(Image.data, np.uint8)
img = img.reshape(240,320,3)
track(img, Image.width, Image.height)
def listener():
rospy.init_node('track')
rospy.Subscriber('/iris/usb_cam/image_raw', Image, callback)
rospy.spin()
def track(frame, width, height):
img = cv2.cvtColor(frame, cv2.COLOR_RGB2GRAY)
_, img = cv2.threshold(img, 127, 255, cv2.THRESH_BINARY)
contours = cv2.findContours(img, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
rects = []
centers = []
for contour in contours[1]:
if cv2.contourArea(contour) < 100:
continue
epsilon = 0.02 * cv2.arcLength(contour, True)
approx = cv2.approxPolyDP(contour, epsilon, True)
if approx.shape[0] == 4 and cv2.isContourConvex(approx):
rects.append(approx)
centers.append((approx[0]+approx[1]+approx[2]+approx[3]).squeeze()/4)
center_iter = list(range(len(centers)))
result = []
threshold = 20
while len(center_iter) is not 0:
j = 1
resultnow = []
while j < len(center_iter):
if np.sum((centers[center_iter[0]] - centers[center_iter[j]])**2) < threshold:
resultnow.append(center_iter[j])
center_iter.pop(j)
j = j-1
j = j+1
resultnow.append(center_iter[0])
center_iter.pop(0)
if len(result) < len(resultnow):
result = resultnow
rects = np.array(rects)[result]
if len(result) > 2:
centers = np.sum(np.array(centers)[result], axis=0).astype(np.double) / len(result)
publish(centers, width, height)
else:
center_temp = center()
center_temp.iffind = False
center_publish.publish(center_temp)
def publish(centers, width, height):
center_temp = center()
center_temp.width = width
center_temp.height = height
center_temp.x = centers[1]
center_temp.y = centers[0]
center_temp.iffind = True
center_publish.publish(center_temp)
if __name__ == '__main__':
listener()
飞机控制
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <geometry_msgs/TwistStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
#include <landing/center.h> // 导入自定义消息类型
mavros_msgs::State current_state;
void state_cb(const mavros_msgs::State::ConstPtr &msg)
{
current_state = *msg;
}
geometry_msgs::PoseStamped local_position;
void position_cb(const geometry_msgs::PoseStamped::ConstPtr &msg)
{
local_position = *msg;
}
landing::center landmark;
void center_cb(const landing::center::ConstPtr &msg)
{
landmark = *msg;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "landing_node");
ros::NodeHandle nh;
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>
("mavros/state", 10, state_cb);
ros::Subscriber position_sub = nh.subscribe<geometry_msgs::PoseStamped>
("mavros/local_position/pose", 10, position_cb);
ros::Subscriber center_sub = nh.subscribe<landing::center>
("center", 10, center_cb);
ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>
("mavros/setpoint_position/local", 10);
ros::Publisher local_vel_pub = nh.advertise<geometry_msgs::TwistStamped>
("mavros/setpoint_velocity/cmd_vel", 10);
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>
("mavros/cmd/arming");
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>
("mavros/set_mode");
ros::Rate rate(20.0);
while(ros::ok() && current_state.connected)
{
ros::spinOnce();
rate.sleep();
}
geometry_msgs::PoseStamped pose;//姿态控制
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2;
geometry_msgs::TwistStamped vel;//速度控制
for(int i = 100; ros::ok() && i > 0; --i)
{
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
mavros_msgs::SetMode offb_set_mode;
offb_set_mode.request.custom_mode = "OFFBOARD";
mavros_msgs::CommandBool arm_cmd;
arm_cmd.request.value = true;
ros::Time last_request = ros::Time::now();
//起飞
while(ros::ok())
{
if(current_state.mode != "OFFBOARD" && (ros::Time::now() - last_request > ros::Duration(5.0)))
{
if(set_mode_client.call(offb_set_mode) && offb_set_mode.response.mode_sent)
{
ROS_INFO("Offboard enabled");
}
last_request = ros::Time::now();
}
else if(!current_state.armed && (ros::Time::now() - last_request > ros::Duration(5.0)))
{
if(arming_client.call(arm_cmd) && arm_cmd.response.success)
{
ROS_INFO("Vehicle armed");
}
last_request = ros::Time::now();
}
else if(ros::Time::now() - last_request > ros::Duration(5.0))
{
break;
}
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
//逛一圈
last_request = ros::Time::now();
while(ros::ok())
{
if(ros::Time::now() - last_request > ros::Duration(5.0))
{
break;
}
vel.twist.linear.x = 1;
vel.twist.linear.y = 0;
vel.twist.linear.z = 0;
local_vel_pub.publish(vel);
ros::spinOnce();
rate.sleep();
}
last_request = ros::Time::now();
while(ros::ok())
{
if(ros::Time::now() - last_request > ros::Duration(5.0))
{
break;
}
vel.twist.linear.x = 0;
vel.twist.linear.y = 1;
vel.twist.linear.z = 0;
local_vel_pub.publish(vel);
ros::spinOnce();
rate.sleep();
}
last_request = ros::Time::now();
while(ros::ok())
{
if(ros::Time::now() - last_request > ros::Duration(5.0))
{
break;
}
vel.twist.linear.x = -1;
vel.twist.linear.y = 0;
vel.twist.linear.z = 0;
local_vel_pub.publish(vel);
ros::spinOnce();
rate.sleep();
}
last_request = ros::Time::now();
while(ros::ok())
{
if(ros::Time::now() - last_request > ros::Duration(5.0))
{
break;
}
vel.twist.linear.x = 0;
vel.twist.linear.y = -1;
vel.twist.linear.z = 0;
local_vel_pub.publish(vel);
ros::spinOnce();
rate.sleep();
}
//控制降落部分
while(ros::ok())
{
//高度低于0.3时转为降落模式
if(local_position.pose.position.z < 0.3)
{
break;
}
//如果找到地标,控制方向
if(landmark.iffind)
{
//计算两方向err
double err_x = landmark.height / 2.0 - landmark.x;
double err_y = landmark.width / 2.0 - landmark.y;
ROS_INFO_STREAM("state=" << err_x << " " << err_y);
//速度控制
vel.twist.linear.x = err_x / 400;
vel.twist.linear.y = err_y / 400;
//如果位置很正开始降落
if(err_x < 10 && err_y < 10)
{
vel.twist.linear.z = -0.2;
}
else
{
vel.twist.linear.z = 0;
}
local_vel_pub.publish(vel);
ros::spinOnce();
rate.sleep();
}
//如果找不到矩形地标,回到2m高度
else
{
pose.pose.position.x = local_position.pose.position.x;
pose.pose.position.y = local_position.pose.position.y;
pose.pose.position.z = 2;
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
}
offb_set_mode.request.custom_mode = "AUTO.LAND";
if(set_mode_client.call(offb_set_mode) && offb_set_mode.response.mode_sent)
{
ROS_INFO("Offboard enabled");
last_request = ros::Time::now();
}
return 0;
}
vi landing/CMakeLists.txt
# 按提示增加
## Generate messages in the 'msg' folder
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
add_message_files(FILES center.msg)
## Generate added messages and services with any dependencies listed here
# generate_messages(
# DEPENDENCIES
# geometry_msgs# std_msgs
# )
generate_messages(DEPENDENCIES std_msgs)
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
# add_executable(${PROJECT_NAME}_node src/landing_node.cpp)
add_executable(landing_node src/control.cpp)
## Specify libraries to link a library or executable target against
# target_link_libraries(${PROJECT_NAME}_node
# ${catkin_LIBRARIES}
# )
target_link_libraries(landing_node
${catkin_LIBRARIES}
)
vi landing/package.xml
<!-- 增加两行 -->
<build_depend>message_generation</build_depend>
<exec_depend>message_generation</exec_depend>
编译
catkin build
运行
roslaunch px4 mavros_posix_sitl.launch
python src/landing/scripts/track.py
rosrun landing landing_node
实际效果
https://www.bilibili.com/video/BV1RE411M755?from=search&seid=18007439676134041510
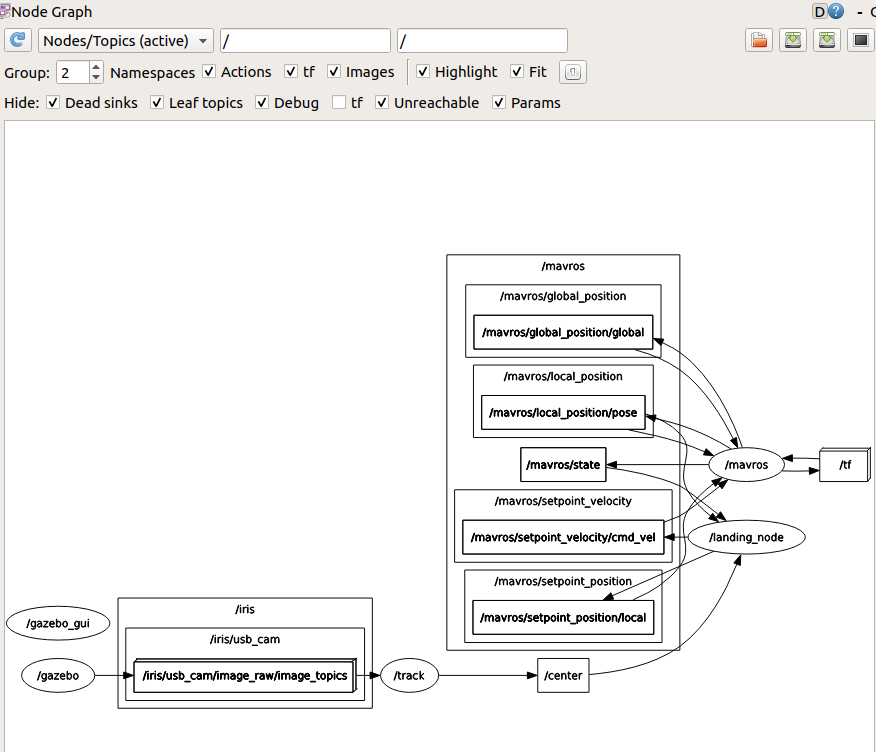
rqt_graph
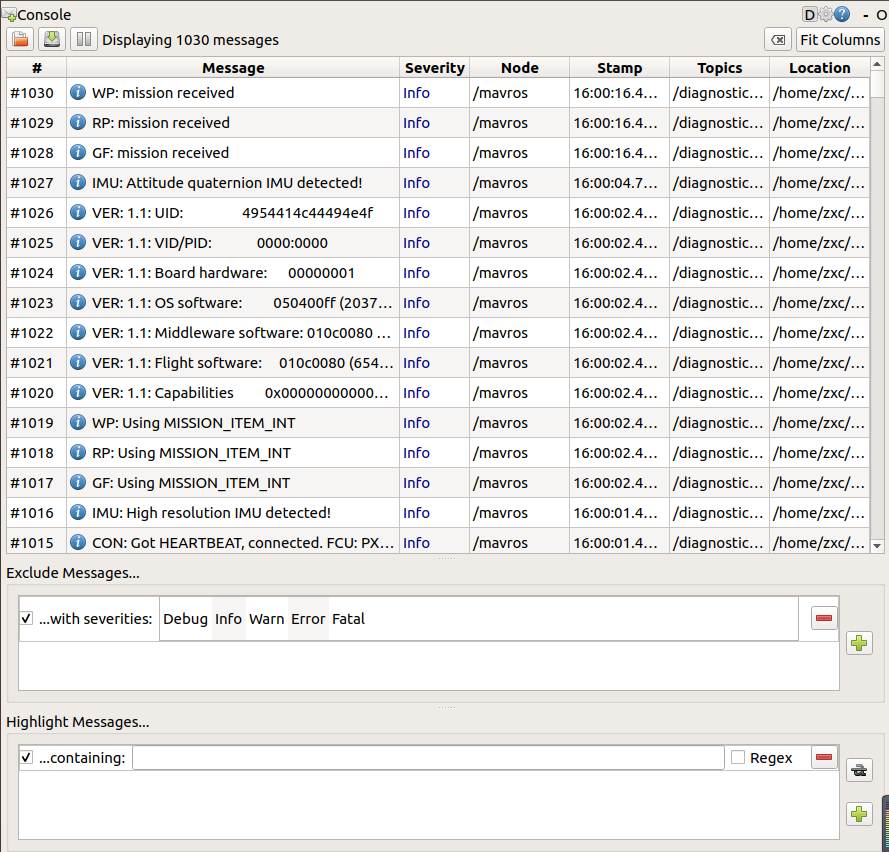
rqt_console


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· AI与.NET技术实操系列(二):开始使用ML.NET
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 【自荐】一款简洁、开源的在线白板工具 Drawnix
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY
· Docker 太简单,K8s 太复杂?w7panel 让容器管理更轻松!