
SPL06-001 气压计
歌尔是全球领先的MEMS厂家,最新推出新款气压传感器SPL06-001,定位精度可达5cm
手册地址
https://download.csdn.net/download/zhangxuechao_/10548473
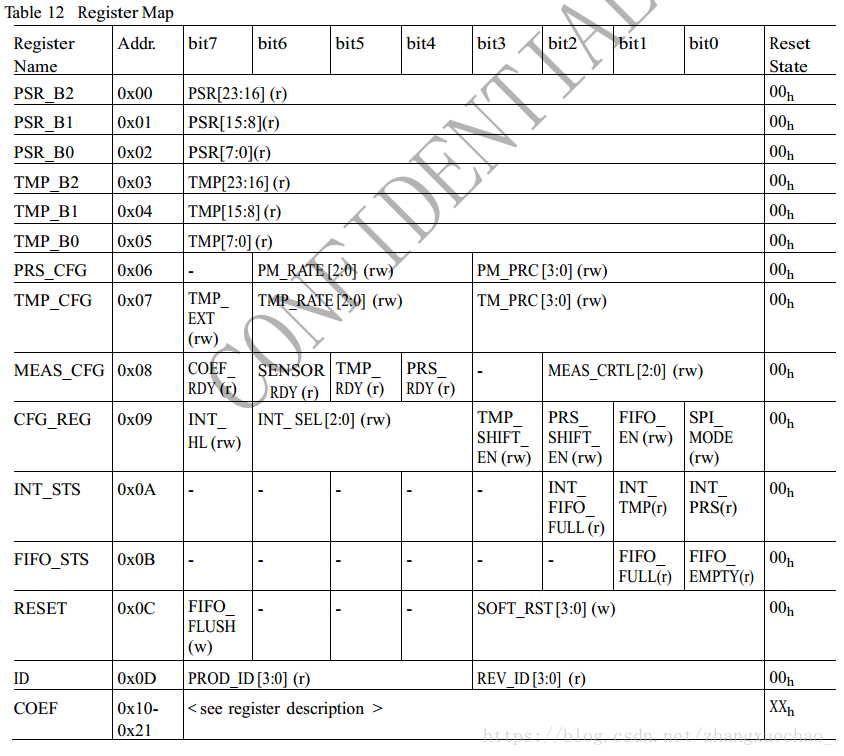
寄存器
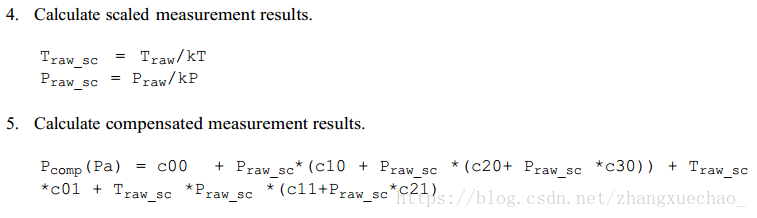
计算方法
举例
//气压测量速率(sample/sec),Background 模式使用
#define PM_RATE_1 (0<<4) //1 measurements pr. sec.
#define PM_RATE_2 (1<<4) //2 measurements pr. sec.
#define PM_RATE_4 (2<<4) //4 measurements pr. sec.
#define PM_RATE_8 (3<<4) //8 measurements pr. sec.
#define PM_RATE_16 (4<<4) //16 measurements pr. sec.
#define PM_RATE_32 (5<<4) //32 measurements pr. sec.
#define PM_RATE_64 (6<<4) //64 measurements pr. sec.
#define PM_RATE_128 (7<<4) //128 measurements pr. sec.
//气压重采样速率(times),Background 模式使用
#define PM_PRC_1 0 //Sigle kP=524288 ,3.6ms
#define PM_PRC_2 1 //2 times kP=1572864 ,5.2ms
#define PM_PRC_4 2 //4 times kP=3670016 ,8.4ms
#define PM_PRC_8 3 //8 times kP=7864320 ,14.8ms
#define PM_PRC_16 4 //16 times kP=253952 ,27.6ms
#define PM_PRC_32 5 //32 times kP=516096 ,53.2ms
#define PM_PRC_64 6 //64 times kP=1040384 ,104.4ms
#define PM_PRC_128 7 //128 times kP=2088960 ,206.8ms
//温度测量速率(sample/sec),Background 模式使用
#define TMP_RATE_1 (0<<4) //1 measurements pr. sec.
#define TMP_RATE_2 (1<<4) //2 measurements pr. sec.
#define TMP_RATE_4 (2<<4) //4 measurements pr. sec.
#define TMP_RATE_8 (3<<4) //8 measurements pr. sec.
#define TMP_RATE_16 (4<<4) //16 measurements pr. sec.
#define TMP_RATE_32 (5<<4) //32 measurements pr. sec.
#define TMP_RATE_64 (6<<4) //64 measurements pr. sec.
#define TMP_RATE_128 (7<<4) //128 measurements pr. sec.
//温度重采样速率(times),Background 模式使用
#define TMP_PRC_1 0 //Sigle
#define TMP_PRC_2 1 //2 times
#define TMP_PRC_4 2 //4 times
#define TMP_PRC_8 3 //8 times
#define TMP_PRC_16 4 //16 times
#define TMP_PRC_32 5 //32 times
#define TMP_PRC_64 6 //64 times
#define TMP_PRC_128 7 //128 times
//SPL06_MEAS_CFG
#define MEAS_COEF_RDY 0x80
#define MEAS_SENSOR_RDY 0x40 //传感器初始化完成
#define MEAS_TMP_RDY 0x20 //有新的温度数据
#define MEAS_PRS_RDY 0x10 //有新的气压数据
#define MEAS_CTRL_Standby 0x00 //空闲模式
#define MEAS_CTRL_PressMeasure 0x01 //单次气压测量
#define MEAS_CTRL_TempMeasure 0x02 //单次温度测量
#define MEAS_CTRL_ContinuousPress 0x05 //连续气压测量
#define MEAS_CTRL_ContinuousTemp 0x06 //连续温度测量
#define MEAS_CTRL_ContinuousPressTemp 0x07 //连续气压温度测量
//FIFO_STS
#define SPL06_FIFO_FULL 0x02
#define SPL06_FIFO_EMPTY 0x01
//INT_STS
#define SPL06_INT_FIFO_FULL 0x04
#define SPL06_INT_TMP 0x02
#define SPL06_INT_PRS 0x01
//CFG_REG
#define SPL06_CFG_T_SHIFT 0x08 //oversampling times>8时必须使用
#define SPL06_CFG_P_SHIFT 0x04
#define SP06_PSR_B2 0x00 //气压值
#define SP06_PSR_B1 0x01
#define SP06_PSR_B0 0x02
#define SP06_TMP_B2 0x03 //温度值
#define SP06_TMP_B1 0x04
#define SP06_TMP_B0 0x05
#define SP06_PSR_CFG 0x06 //气压测量配置
#define SP06_TMP_CFG 0x07 //温度测量配置
#define SP06_MEAS_CFG 0x08 //测量模式配置
#define SP06_CFG_REG 0x09
#define SP06_INT_STS 0x0A
#define SP06_FIFO_STS 0x0B
#define SP06_RESET 0x0C
#define SP06_ID 0x0D
#define SP06_COEF 0x10 //-0x21
#define SP06_COEF_SRCE 0x28
static float _kT,_kP;
static float _Temp,_Press;
uint8_t spl06_init(void)
{
uint8_t coef[18];
uint8_t id;
if(spl06_write_reg(SP06_RESET,0x89))
{
puts("spl06 reset fail\r\n");
return 1;
}
id = spl06_read_reg(SP06_ID);
if(id != 0x10)
{
puts("sol06 id error !!!\r\n");
}
//delay_ms(200); //复位后系数准备好需要至少40ms
spl06_read_buffer(SP06_COEF,coef,18);
_C0 = ((int16_t)coef[0]<<4 ) + ((coef[1]&0xF0)>>4);
_C0 = (_C0&0x0800)?(0xF000|_C0):_C0;
_C1 = ((int16_t)(coef[1]&0x0F)<<8 ) + coef[2];
_C1 = (_C1&0x0800)?(0xF000|_C1):_C1;
_C00 = ((int32_t)coef[3]<<12 ) + ((uint32_t)coef[4]<<4 ) + (coef[5]>>4);
_C10 = ((int32_t)(coef[5]&0x0F)<<16 ) + ((uint32_t)coef[6]<<8 ) + coef[7];
_C00 = (_C00&0x080000)?(0xFFF00000|_C00):_C00;
_C10 = (_C10&0x080000)?(0xFFF00000|_C10):_C10;
_C01 = ((int16_t)coef[8]<<8 ) + coef[9];
_C11 = ((int16_t)coef[10]<<8 ) + coef[11];
_C11 = (_C11&0x0800)?(0xF000|_C11):_C11;
_C20 = ((int16_t)coef[12]<<8 ) + coef[13];
_C20 = (_C20&0x0800)?(0xF000|_C20):_C20;
_C21 = ((int16_t)coef[14]<<8 ) + coef[15];
_C21 = (_C21&0x0800)?(0xF000|_C21):_C21;
_C30 = ((int16_t)coef[16]<<8 ) + coef[17];
_C30 = (_C30&0x0800)?(0xF000|_C30):_C30;
spl06_config_pressure(PM_RATE_128,PM_PRC_64);
spl06_config_temperature(PM_RATE_8,TMP_PRC_8);
spl06_start(MEAS_CTRL_ContinuousPressTemp); //启动连续的气压温度测量
delay_ms(20);
return 0;
}
void spl06_start(uint8_t mode)
{
spl06_write_reg(SP06_MEAS_CFG, mode);
}
void spl06_config_temperature(uint8_t rate,uint8_t oversampling)
{
switch(oversampling)
{
case TMP_PRC_1:
_kT = 524288;
break;
case TMP_PRC_2:
_kT = 1572864;
break;
case TMP_PRC_4:
_kT = 3670016;
break;
case TMP_PRC_8:
_kT = 7864320;
break;
case TMP_PRC_16:
_kT = 253952;
break;
case TMP_PRC_32:
_kT = 516096;
break;
case TMP_PRC_64:
_kT = 1040384;
break;
case TMP_PRC_128:
_kT = 2088960;
break;
}
spl06_write_reg(SP06_TMP_CFG,rate|oversampling|0x80); //温度每秒128次测量一次
if(oversampling > TMP_PRC_8)
{
uint8_t temp = spl06_read_reg(SP06_CFG_REG);
spl06_write_reg(SP06_CFG_REG,temp|SPL06_CFG_T_SHIFT);
}
}
void spl06_config_pressure(uint8_t rate,uint8_t oversampling)
{
switch(oversampling)
{
case PM_PRC_1:
_kP = 524288;
break;
case PM_PRC_2:
_kP = 1572864;
break;
case PM_PRC_4:
_kP = 3670016;
break;
case PM_PRC_8:
_kP = 7864320;
break;
case PM_PRC_16:
_kP = 253952;
break;
case PM_PRC_32:
_kP = 516096;
break;
case PM_PRC_64:
_kP = 1040384;
break;
case PM_PRC_128:
_kP = 2088960;
break;
}
spl06_write_reg(SP06_PSR_CFG,rate|oversampling);
if(oversampling > PM_PRC_8)
{
uint8_t temp = spl06_read_reg(SP06_CFG_REG);
spl06_write_reg(SP06_CFG_REG,temp|SPL06_CFG_P_SHIFT);
}
}
int32_t spl06_get_pressure_adc()
{
uint8_t buf[3];
int32_t adc;
spl06_read_buffer(SP06_PSR_B2,buf,3);
adc = (int32_t)(buf[0]<<16) + (buf[1]<<8) + buf[2];
adc = (adc&0x800000)?(0xFF000000|adc):adc;
return adc;
}
int32_t spl06_get_temperature_adc()
{
uint8_t buf[3];
int32_t adc;
spl06_read_buffer(SP06_TMP_B2,buf,3);
adc = (int32_t)(buf[0]<<16) + (buf[1]<<8) + buf[2];
return adc;
}
void spl06_update_pressure()
{
float Traw_src, Praw_src;
float qua2, qua3;
Traw_src = _kT * _raw_temp;
Praw_src = _kP * _raw_press;
//计算温度
_Temp = 0.5f*_C0 + Traw_src * _C1;
//计算气压
qua2 = _C10 + Praw_src * (_C20 + Praw_src* _C30);
qua3 = Traw_src * Praw_src * (_C11 + Praw_src * _C21);
_Press = _C00 + Praw_src * qua2 + Traw_src * _C01 + qua3;
}
void spl06_update()
{
_raw_temp = spl06_get_temperature_adc();
_raw_press = spl06_get_pressure_adc();
spl06_update_pressure();
}
float spl06_get_temperature()
{
return _Temp;
}
float spl06_get_pressure()
{
return _Press;
}
uint8_t spi2_write_reg(uint8_t reg_addr,uint8_t reg_val)
{
spi2_read_write_byte(reg_addr&0x7f);
spi2_read_write_byte(reg_val);
return 0;
}
uint8_t spi2_read_reg(uint8_t reg_addr)
{
spi2_read_write_byte(reg_addr|0x80);
return spi2_read_write_byte(0xff);
}
uint8_t spi2_read_reg_buffer(uint8_t reg_addr,void *buffer,uint16_t len)
{
uint8_t *p = buffer;
uint16_t i;
spi2_read_write_byte(reg_addr|0x80);
for(i=0;i<len;i++)
{
*p++= spi2_read_write_byte(0xff);
}
return 0;
}
 浙公网安备 33010602011771号
浙公网安备 33010602011771号