

动手学强化学习(八):DQN 改进算法
第 8 章 DQN 改进算法
8.1 简介
DQN 算法敲开了深度强化学习的大门,但是作为先驱性的工作,其本身存在着一些问题以及一些可以改进的地方。于是,在 DQN 之后,学术界涌现出了非常多的改进算法。本章将介绍其中两个非常著名的算法:Double DQN 和 Dueling DQN,这两个算法的实现非常简单,只需要在 DQN 的基础上稍加修改,它们能在一定程度上改善 DQN 的效果。如果读者想要了解更多、更详细的 DQN 改进方法,可以阅读 Rainbow 模型的论文及其引用文献。
8.2 Double DQN
普通的 DQN 算法通常会导致对
其中
换句话说,
为了解决这一问题,Double DQN 算法提出利用两个独立训练的神经网络估算
在传统的 DQN 算法中,本来就存在两套
8.3 Double DQN 代码实践
显然,DQN 与 Double DQN 的差别只是在于计算状态
· DQN 的优化目标可以写为
所以 Double DQN 的代码实现可以直接在 DQN 的基础上进行,无须做过多修改。
本节采用的环境是倒立摆 (Inverted Pendulum),该环境下有一个处于随机位置的倒立摆,如图 8-1 所示。环境的状态包括倒立摆角度的正弦值
图8-1 Pendulum环境示意图
表8-1 Pendulum环境的状态空间
| 标号 | 名称 | 最小值 | 最大值 |
|---|---|---|---|
| 0 | cosθ | -1.0 | 1.0 |
| 1 | sinθ | -1.0 | 1.0 |
| 2 | -8.0 | 8.0 |
表8-2 Pendulum环境的动作空间
| 标号 | 动作 | 最小值 | 最大值 |
|---|---|---|---|
| 0 | 力矩 | -2.0 | 2.0 |
力矩大小是在[-2,2]范围内的连续值。由于 DQN 只能处理离散动作环境,因此我们无法直接用 DQN 来处理倒立摆环境,但倒立摆环境可以比较方便地验证 DQN 对
import random
import gym
import numpy as np
import torch
import torch.nn.functional as F
import matplotlib.pyplot as plt
import rl_utils
from tqdm import tqdm
class Qnet(torch.nn.Module):
''' 只有一层隐藏层的Q网络 '''
def __init__(self, state_dim, hidden_dim, action_dim):
super(Qnet, self).__init__()
self.fc1 = torch.nn.Linear(state_dim, hidden_dim)
self.fc2 = torch.nn.Linear(hidden_dim, action_dim)
def forward(self, x):
x = F.relu(self.fc1(x))
return self.fc2(x)
接下来我们在 DQN 代码的基础上稍做修改以实现 Double DQN。
class DQN:
''' DQN算法,包括Double DQN '''
def __init__(self,
state_dim,
hidden_dim,
action_dim,
learning_rate,
gamma,
epsilon,
target_update,
device,
dqn_type='VanillaDQN'):
self.action_dim = action_dim
self.q_net = Qnet(state_dim, hidden_dim, self.action_dim).to(device)
self.target_q_net = Qnet(state_dim, hidden_dim,
self.action_dim).to(device)
self.optimizer = torch.optim.Adam(self.q_net.parameters(),
lr=learning_rate)
self.gamma = gamma
self.epsilon = epsilon
self.target_update = target_update
self.count = 0
self.dqn_type = dqn_type
self.device = device
def take_action(self, state):
if np.random.random() < self.epsilon:
action = np.random.randint(self.action_dim)
else:
state = torch.tensor([state], dtype=torch.float).to(self.device)
action = self.q_net(state).argmax().item()
return action
def max_q_value(self, state):
state = torch.tensor([state], dtype=torch.float).to(self.device)
return self.q_net(state).max().item()
def update(self, transition_dict):
states = torch.tensor(transition_dict['states'],
dtype=torch.float).to(self.device)
actions = torch.tensor(transition_dict['actions']).view(-1, 1).to(
self.device)
rewards = torch.tensor(transition_dict['rewards'],
dtype=torch.float).view(-1, 1).to(self.device)
next_states = torch.tensor(transition_dict['next_states'],
dtype=torch.float).to(self.device)
dones = torch.tensor(transition_dict['dones'],
dtype=torch.float).view(-1, 1).to(self.device)
q_values = self.q_net(states).gather(1, actions) # Q值
# 下个状态的最大Q值
if self.dqn_type == 'DoubleDQN': # DQN与Double DQN的区别
max_action = self.q_net(next_states).max(1)[1].view(-1, 1)
max_next_q_values = self.target_q_net(next_states).gather(1, max_action)
else: # DQN的情况
max_next_q_values = self.target_q_net(next_states).max(1)[0].view(-1, 1)
q_targets = rewards + self.gamma * max_next_q_values * (1 - dones) # TD误差目标
dqn_loss = torch.mean(F.mse_loss(q_values, q_targets)) # 均方误差损失函数
self.optimizer.zero_grad() # PyTorch中默认梯度会累积,这里需要显式将梯度置为0
dqn_loss.backward() # 反向传播更新参数
self.optimizer.step()
if self.count % self.target_update == 0:
self.target_q_net.load_state_dict(
self.q_net.state_dict()) # 更新目标网络
self.count += 1
接下来我们设置相应的超参数,并实现将倒立摆环境中的连续动作转化为离散动作的函数。
lr = 1e-2
num_episodes = 200
hidden_dim = 128
gamma = 0.98
epsilon = 0.01
target_update = 50
buffer_size = 5000
minimal_size = 1000
batch_size = 64
device = torch.device("cuda") if torch.cuda.is_available() else torch.device(
"cpu")
env_name = 'Pendulum-v0'
env = gym.make(env_name)
state_dim = env.observation_space.shape[0]
action_dim = 11 # 将连续动作分成11个离散动作
def dis_to_con(discrete_action, env, action_dim): # 离散动作转回连续的函数
action_lowbound = env.action_space.low[0] # 连续动作的最小值
action_upbound = env.action_space.high[0] # 连续动作的最大值
return action_lowbound + (discrete_action /
(action_dim - 1)) * (action_upbound -
action_lowbound)
接下来要对比 DQN 和 Double DQN 的训练情况,为了便于后续多次调用,我们进一步将 DQN 算法的训练过程定义成一个函数。训练过程会记录下每个状态的最大Q值,在训练完成后我们可以将结果可视化,观测这些Q值存在的过高估计的情况,以此来对比 DQN 和 Double DQN 的不同。
def train_DQN(agent, env, num_episodes, replay_buffer, minimal_size,
batch_size):
return_list = []
max_q_value_list = []
max_q_value = 0
for i in range(10):
with tqdm(total=int(num_episodes / 10),
desc='Iteration %d' % i) as pbar:
for i_episode in range(int(num_episodes / 10)):
episode_return = 0
state = env.reset()
done = False
while not done:
action = agent.take_action(state)
max_q_value = agent.max_q_value(
state) * 0.005 + max_q_value * 0.995 # 平滑处理
max_q_value_list.append(max_q_value) # 保存每个状态的最大Q值
action_continuous = dis_to_con(action, env,
agent.action_dim)
next_state, reward, done, _ = env.step([action_continuous])
replay_buffer.add(state, action, reward, next_state, done)
state = next_state
episode_return += reward
if replay_buffer.size() > minimal_size:
b_s, b_a, b_r, b_ns, b_d = replay_buffer.sample(
batch_size)
transition_dict = {
'states': b_s,
'actions': b_a,
'next_states': b_ns,
'rewards': b_r,
'dones': b_d
}
agent.update(transition_dict)
return_list.append(episode_return)
if (i_episode + 1) % 10 == 0:
pbar.set_postfix({
'episode':
'%d' % (num_episodes / 10 * i + i_episode + 1),
'return':
'%.3f' % np.mean(return_list[-10:])
})
pbar.update(1)
return return_list, max_q_value_list
一切就绪!我们首先训练 DQN 并打印出其学习过程中最大Q值的情况。
random.seed(0)
np.random.seed(0)
env.seed(0)
torch.manual_seed(0)
replay_buffer = rl_utils.ReplayBuffer(buffer_size)
agent = DQN(state_dim, hidden_dim, action_dim, lr, gamma, epsilon,
target_update, device)
return_list, max_q_value_list = train_DQN(agent, env, num_episodes,
replay_buffer, minimal_size,
batch_size)
episodes_list = list(range(len(return_list)))
mv_return = rl_utils.moving_average(return_list, 5)
plt.plot(episodes_list, mv_return)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('DQN on {}'.format(env_name))
plt.show()
frames_list = list(range(len(max_q_value_list)))
plt.plot(frames_list, max_q_value_list)
plt.axhline(0, c='orange', ls='--')
plt.axhline(10, c='red', ls='--')
plt.xlabel('Frames')
plt.ylabel('Q value')
plt.title('DQN on {}'.format(env_name))
plt.show()
Iteration 0: 100%|██████████| 20/20 [00:02<00:00, 7.14it/s, episode=20, return=-1018.764]
Iteration 1: 100%|██████████| 20/20 [00:03<00:00, 5.73it/s, episode=40, return=-463.311]
Iteration 2: 100%|██████████| 20/20 [00:03<00:00, 5.53it/s, episode=60, return=-184.817]
Iteration 3: 100%|██████████| 20/20 [00:03<00:00, 5.55it/s, episode=80, return=-317.366]
Iteration 4: 100%|██████████| 20/20 [00:03<00:00, 5.67it/s, episode=100, return=-208.929]
Iteration 5: 100%|██████████| 20/20 [00:03<00:00, 5.59it/s, episode=120, return=-182.659]
Iteration 6: 100%|██████████| 20/20 [00:03<00:00, 5.25it/s, episode=140, return=-275.938]
Iteration 7: 100%|██████████| 20/20 [00:03<00:00, 5.65it/s, episode=160, return=-209.702]
Iteration 8: 100%|██████████| 20/20 [00:03<00:00, 5.73it/s, episode=180, return=-246.861]
Iteration 9: 100%|██████████| 20/20 [00:03<00:00, 5.77it/s, episode=200, return=-293.374]
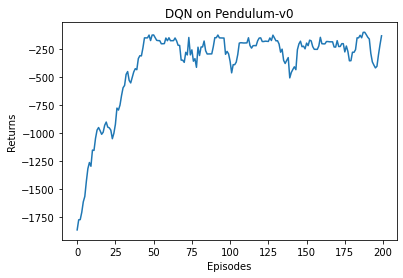
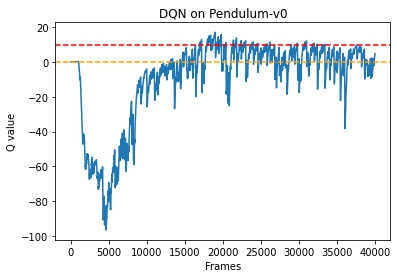
根据代码运行结果我们可以发现,DQN 算法在倒立摆环境中能取得不错的回报,最后的期望回报在-200 左右,但是不少Q值超过了 0,有一些还超过了 10,该现象便是 DQN 算法中的Q值过高估计。我们现在来看一下 Double DQN 是否能对此问题进行改善。
random.seed(0)
np.random.seed(0)
env.seed(0)
torch.manual_seed(0)
replay_buffer = rl_utils.ReplayBuffer(buffer_size)
agent = DQN(state_dim, hidden_dim, action_dim, lr, gamma, epsilon,
target_update, device, 'DoubleDQN')
return_list, max_q_value_list = train_DQN(agent, env, num_episodes,
replay_buffer, minimal_size,
batch_size)
episodes_list = list(range(len(return_list)))
mv_return = rl_utils.moving_average(return_list, 5)
plt.plot(episodes_list, mv_return)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('Double DQN on {}'.format(env_name))
plt.show()
frames_list = list(range(len(max_q_value_list)))
plt.plot(frames_list, max_q_value_list)
plt.axhline(0, c='orange', ls='--')
plt.axhline(10, c='red', ls='--')
plt.xlabel('Frames')
plt.ylabel('Q value')
plt.title('Double DQN on {}'.format(env_name))
plt.show()
Iteration 0: 100%|██████████| 20/20 [00:03<00:00, 6.60it/s, episode=20, return=-818.719]
Iteration 1: 100%|██████████| 20/20 [00:03<00:00, 5.43it/s, episode=40, return=-391.392]
Iteration 2: 100%|██████████| 20/20 [00:03<00:00, 5.29it/s, episode=60, return=-216.078]
Iteration 3: 100%|██████████| 20/20 [00:03<00:00, 5.52it/s, episode=80, return=-438.220]
Iteration 4: 100%|██████████| 20/20 [00:03<00:00, 5.42it/s, episode=100, return=-162.128]
Iteration 5: 100%|██████████| 20/20 [00:03<00:00, 5.50it/s, episode=120, return=-389.088]
Iteration 6: 100%|██████████| 20/20 [00:03<00:00, 5.44it/s, episode=140, return=-273.700]
Iteration 7: 100%|██████████| 20/20 [00:03<00:00, 5.23it/s, episode=160, return=-221.605]
Iteration 8: 100%|██████████| 20/20 [00:04<00:00, 4.91it/s, episode=180, return=-262.134]
Iteration 9: 100%|██████████| 20/20 [00:03<00:00, 5.34it/s, episode=200, return=-278.752]
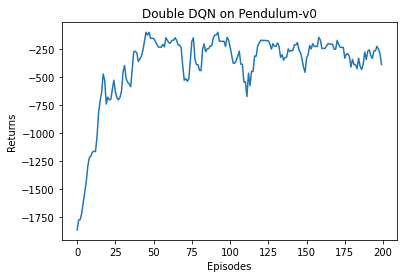
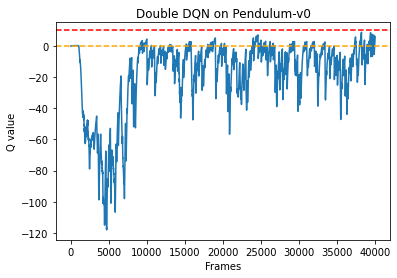
我们可以发现,与普通的 DQN 相比,Double DQN 比较少出现Q值大于 0 的情况,说明Q值过高估计的问题得到了很大缓解。
8.4 Dueling DQN
Dueling DQN 是 DQN 另一种的改进算法,它在传统 DQN 的基础上只进行了微小的改动,但却能
大幅提升 DQN 的表现。在强化学习中,我们将状态动作价值函数
其中,
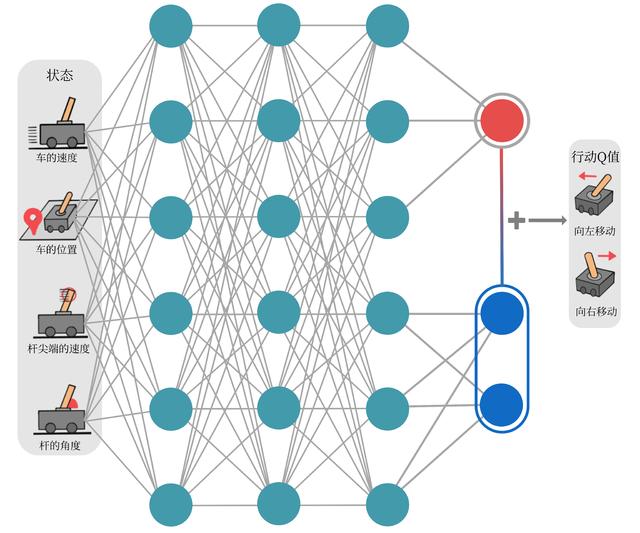
图8-2 Dueling DQN的网络结构图
将状态价值函数和优势函数分别建模的好处在于:某些情境下智能体只会关注状态的价值,而并不关心不同动作导致的差异,此时将二者分开建模能够使智能体更好地处理与动作关联较小的状态。在图 8-3 所示的驾驶车辆游戏中,智能体注意力集中的部位被显示为橙色(另见彩插图 4),当智能体前面没有车时,车辆自身动作并没有太大差异,此时智能体更关注状态价值,而当智能体前面有车时(智能体需要超车),智能体开始关注不同动作优势值的差异。
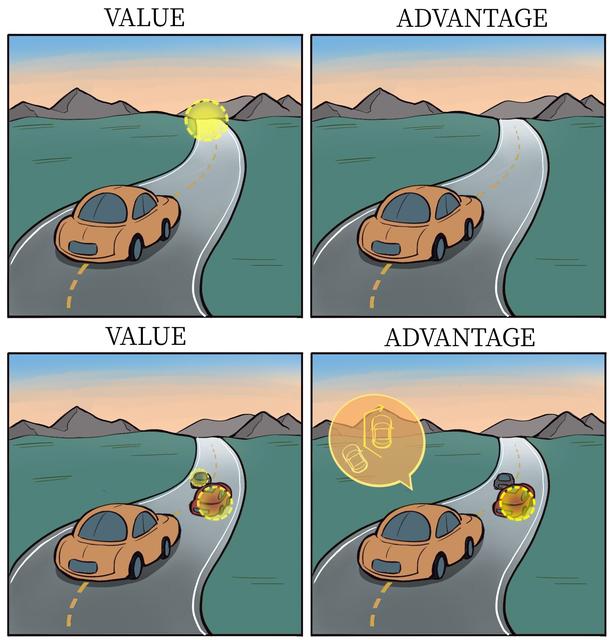
图8-3 状态价值和优势值的简单例子
对于 Dueling DQN 中的公式
则得到的
动作的优势函数的实际输出为 0, 即:
此时
此时
有的读者可能会问:“为什么 Dueling DQN 会比 DQN 好?“部分原因在于 Dueling DQN 能更高效
学习状态价值函数。每一次更新时,函数
8.5 Dueling DQN 代码实践
Dueling DQN 与 DQN 相比的差异只是在网络结构上,大部分代码依然可以继续沿用。我们定义状态价值函数和优势函数的复合神经网络VAnet。
class VAnet(torch.nn.Module):
''' 只有一层隐藏层的A网络和V网络 '''
def __init__(self, state_dim, hidden_dim, action_dim):
super(VAnet, self).__init__()
self.fc1 = torch.nn.Linear(state_dim, hidden_dim) # 共享网络部分
self.fc_A = torch.nn.Linear(hidden_dim, action_dim)
self.fc_V = torch.nn.Linear(hidden_dim, 1)
def forward(self, x):
A = self.fc_A(F.relu(self.fc1(x)))
V = self.fc_V(F.relu(self.fc1(x)))
Q = V + A - A.mean(1).view(-1, 1) # Q值由V值和A值计算得到
return Q
class DQN:
''' DQN算法,包括Double DQN和Dueling DQN '''
def __init__(self,
state_dim,
hidden_dim,
action_dim,
learning_rate,
gamma,
epsilon,
target_update,
device,
dqn_type='VanillaDQN'):
self.action_dim = action_dim
if dqn_type == 'DuelingDQN': # Dueling DQN采取不一样的网络框架
self.q_net = VAnet(state_dim, hidden_dim,
self.action_dim).to(device)
self.target_q_net = VAnet(state_dim, hidden_dim,
self.action_dim).to(device)
else:
self.q_net = Qnet(state_dim, hidden_dim,
self.action_dim).to(device)
self.target_q_net = Qnet(state_dim, hidden_dim,
self.action_dim).to(device)
self.optimizer = torch.optim.Adam(self.q_net.parameters(),
lr=learning_rate)
self.gamma = gamma
self.epsilon = epsilon
self.target_update = target_update
self.count = 0
self.dqn_type = dqn_type
self.device = device
def take_action(self, state):
if np.random.random() < self.epsilon:
action = np.random.randint(self.action_dim)
else:
state = torch.tensor([state], dtype=torch.float).to(self.device)
action = self.q_net(state).argmax().item()
return action
def max_q_value(self, state):
state = torch.tensor([state], dtype=torch.float).to(self.device)
return self.q_net(state).max().item()
def update(self, transition_dict):
states = torch.tensor(transition_dict['states'],
dtype=torch.float).to(self.device)
actions = torch.tensor(transition_dict['actions']).view(-1, 1).to(
self.device)
rewards = torch.tensor(transition_dict['rewards'],
dtype=torch.float).view(-1, 1).to(self.device)
next_states = torch.tensor(transition_dict['next_states'],
dtype=torch.float).to(self.device)
dones = torch.tensor(transition_dict['dones'],
dtype=torch.float).view(-1, 1).to(self.device)
q_values = self.q_net(states).gather(1, actions)
if self.dqn_type == 'DoubleDQN':
max_action = self.q_net(next_states).max(1)[1].view(-1, 1)
max_next_q_values = self.target_q_net(next_states).gather(
1, max_action)
else:
max_next_q_values = self.target_q_net(next_states).max(1)[0].view(
-1, 1)
q_targets = rewards + self.gamma * max_next_q_values * (1 - dones)
dqn_loss = torch.mean(F.mse_loss(q_values, q_targets))
self.optimizer.zero_grad()
dqn_loss.backward()
self.optimizer.step()
if self.count % self.target_update == 0:
self.target_q_net.load_state_dict(self.q_net.state_dict())
self.count += 1
random.seed(0)
np.random.seed(0)
env.seed(0)
torch.manual_seed(0)
replay_buffer = rl_utils.ReplayBuffer(buffer_size)
agent = DQN(state_dim, hidden_dim, action_dim, lr, gamma, epsilon,
target_update, device, 'DuelingDQN')
return_list, max_q_value_list = train_DQN(agent, env, num_episodes,
replay_buffer, minimal_size,
batch_size)
episodes_list = list(range(len(return_list)))
mv_return = rl_utils.moving_average(return_list, 5)
plt.plot(episodes_list, mv_return)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('Dueling DQN on {}'.format(env_name))
plt.show()
frames_list = list(range(len(max_q_value_list)))
plt.plot(frames_list, max_q_value_list)
plt.axhline(0, c='orange', ls='--')
plt.axhline(10, c='red', ls='--')
plt.xlabel('Frames')
plt.ylabel('Q value')
plt.title('Dueling DQN on {}'.format(env_name))
plt.show()
Iteration 0: 100%|████████████████████████████████████████| 20/20 [00:10<00:00, 1.87it/s, episode=20, return=-708.652]
Iteration 1: 100%|████████████████████████████████████████| 20/20 [00:15<00:00, 1.28it/s, episode=40, return=-229.557]
Iteration 2: 100%|████████████████████████████████████████| 20/20 [00:15<00:00, 1.32it/s, episode=60, return=-184.607]
Iteration 3: 100%|████████████████████████████████████████| 20/20 [00:13<00:00, 1.50it/s, episode=80, return=-200.323]
Iteration 4: 100%|███████████████████████████████████████| 20/20 [00:13<00:00, 1.51it/s, episode=100, return=-213.811]
Iteration 5: 100%|███████████████████████████████████████| 20/20 [00:13<00:00, 1.53it/s, episode=120, return=-181.165]
Iteration 6: 100%|███████████████████████████████████████| 20/20 [00:14<00:00, 1.35it/s, episode=140, return=-222.040]
Iteration 7: 100%|███████████████████████████████████████| 20/20 [00:14<00:00, 1.35it/s, episode=160, return=-173.313]
Iteration 8: 100%|███████████████████████████████████████| 20/20 [00:12<00:00, 1.62it/s, episode=180, return=-236.372]
Iteration 9: 100%|███████████████████████████████████████| 20/20 [00:12<00:00, 1.57it/s, episode=200, return=-230.058]
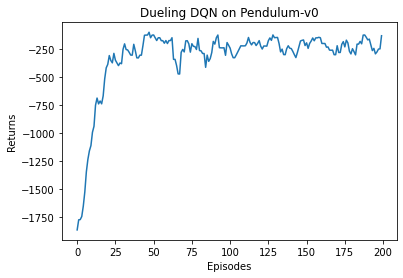
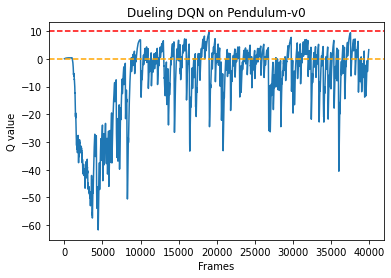
根据代码运行结果我们可以发现,相比于传统的 DQN,Dueling DQN 在多个动作选择下的学习更加稳定,得到的回报最大值也更大。由 Dueling DQN 的原理可知,随着动作空间的增大,Dueling DQN 相比于 DQN 的优势更为明显。之前我们在环境中设置的离散动作数为 11,我们可以增加离散动作数(例如 15、25 等),继续进行对比实验。
8.6 总结
在传统的 DQN 基础上,有两种非常容易实现的变式——Double DQN 和 Dueling DQN,Double DQN 解决了 DQN 中对Q值的过高估计,而 Dueling DQN 能够很好地学习到不同动作的差异性,在动作空间较大的环境下非常有效。从 Double DQN 和 Dueling DQN 的方法原理中,我们也能感受到深度强化学习的研究是在关注深度学习和强化学习有效结合:一是在深度学习的模块的基础上,强化学习方法如何更加有效地工作,并避免深度模型学习行为带来的一些问题,例如使用 Double DQN 解决Q值过高估计的问题;二是在强化学习的场景下,深度学习模型如何有效学习到有用的模式,例如设计 Dueling DQN 网络架构来高效地学习状态价值函数以及动作优势函数。
8.7 扩展阅读: 对 Q 值过高估计的定量分析
我们可以对
即动作空间
证明
将估算误差记为
,由于估算误差对于不同的动作是独立的,因此有:
因此,我们得到关于
最后我们可以得到:
虽然这一分析简化了实际环境,但它仍然正确刻画了
8.8 参考文献
[1] HASSELT V H, GUEZ A, SILVER D. Deep reinforcement learning with double q-learning [C]// Proceedings of the AAAI conference on artificial intelligence. 2016, 30(1).
[2] WANG Z, SCHAUL T, HESSEL M, et al. Dueling network architectures for deep reinforcement learning [C]// International conference on machine learning, PMLR, 2016: 1995-2003.
[3] HESSEL M, MODAYIL J, HASSELT V H, et al. Rainbow: Combining improvements in deep reinforcement learning [C]// Thirty-second AAAI conference on artificial intelligence, 2018.


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
2021-03-05 python(一 ):python生成XML文件代码