import torch.nn as nn
import torch.nn.functional as F
class ActorCritic(nn.Module):
def__init__(self, num_inputs, num_actions):
super(ActorCritic, self).__init__()
self.conv1 = nn.Conv2d(num_inputs, 32, 3, stride=2, padding=1)
self.conv2 = nn.Conv2d(32, 32, 3, stride=2, padding=1)
self.conv3 = nn.Conv2d(32, 32, 3, stride=2, padding=1)
self.conv4 = nn.Conv2d(32, 32, 3, stride=2, padding=1)
self.lstm = nn.LSTMCell(32 * 6 * 6, 512)
self.critic_linear = nn.Linear(512, 1)
self.actor_linear = nn.Linear(512, num_actions)
self._initialize_weights()
def _initialize_weights(self):
for module in self.modules():
if isinstance(module, nn.Conv2d) or isinstance(module, nn.Linear):
nn.init.xavier_uniform_(module.weight)
# nn.init.kaiming_uniform_(module.weight) nn.init.constant_(module.bias, 0)
elif isinstance(module, nn.LSTMCell):
nn.init.constant_(module.bias_ih, 0)
nn.init.constant_(module.bias_hh, 0)
def forward(self, x, hx, cx):
x = F.relu(self.conv1(x))
x = F.relu(self.conv2(x))
x = F.relu(self.conv3(x))
x = F.relu(self.conv4(x))
hx, cx = self.lstm(x.view(x.size(0), -1), (hx, cx))
return self.actor_linear(hx), self.critic_linear(hx), hx, cx#隐层和记忆单元
5、optimal.py
import torch
class GlobalAdam(torch.optim.Adam):
def__init__(self, params, lr):
super(GlobalAdam, self).__init__(params, lr=lr)
for group in self.param_groups:
for p in group['params']:
state = self.state[p]
state['step'] = 0
state['exp_avg'] = torch.zeros_like(p.data)
state['exp_avg_sq'] = torch.zeros_like(p.data)
state['exp_avg'].share_memory_()
state['exp_avg_sq'].share_memory_()
6、process.py
import torc
from src.env import create_train_env
from src.model import ActorCritic
import torch.nn.functional as F
from torch.distributions import Categorical
from collections import deque
from tensorboardX import SummaryWriter
import timeit
def local_train(index, opt, global_model, optimizer, save=False):
torch.manual_seed(123 + index)
if save:
start_time = timeit.default_timer()
writer = SummaryWriter(opt.log_path)
env, num_states, num_actions = create_train_env(opt.world, opt.stage, opt.action_type)#单独玩
local_model = ActorCritic(num_states, num_actions)
if opt.use_gpu:
local_model.cuda()
local_model.train()
state = torch.from_numpy(env.reset())
if opt.use_gpu:
state = state.cuda()
done = True
curr_step = 0
curr_episode = 0
while True:
if save:
if curr_episode % opt.save_interval == 0 and curr_episode > 0:
torch.save(global_model.state_dict(),
"{}/a3c_super_mario_bros_{}_{}".format(opt.saved_path, opt.world, opt.stage))
print("Process {}. Episode {}".format(index, curr_episode))
curr_episode += 1
local_model.load_state_dict(global_model.state_dict())
if done:
h_0 = torch.zeros((1, 512), dtype=torch.float)
c_0 = torch.zeros((1, 512), dtype=torch.float)
else:
h_0 = h_0.detach()
c_0 = c_0.detach()
if opt.use_gpu:
h_0 = h_0.cuda()
c_0 = c_0.cuda()
log_policies = []
values = []
rewards = []
entropies = []
for _ in range(opt.num_local_steps):
curr_step += 1
logits, value, h_0, c_0 = local_model(state, h_0, c_0)#return self.actor_linear(hx), self.critic_linear(hx), hx, cx#隐层和记忆单元
policy = F.softmax(logits, dim=1)
log_policy = F.log_softmax(logits, dim=1)
entropy = -(policy * log_policy).sum(1, keepdim=True)#计算当前熵值
m = Categorical(policy)#采样
action = m.sample().item()
state, reward, done, _ = env.step(action)
state = torch.from_numpy(state)
if opt.use_gpu:
state = state.cuda()
if curr_step > opt.num_global_steps:
done = True
if done:
curr_step = 0
state = torch.from_numpy(env.reset())
if opt.use_gpu:
state = state.cuda()
values.append(value)
log_policies.append(log_policy[0, action])
rewards.append(reward)
entropies.append(entropy)
if done:
break
R = torch.zeros((1, 1), dtype=torch.float)
if opt.use_gpu:
R = R.cuda()
ifnot done:
_, R, _, _ = local_model(state, h_0, c_0)#这个R相当于最后一次的V值,第二个返回值是critic网络的
gae = torch.zeros((1, 1), dtype=torch.float)#额外的处理,为了减小varianceif opt.use_gpu:
gae = gae.cuda()
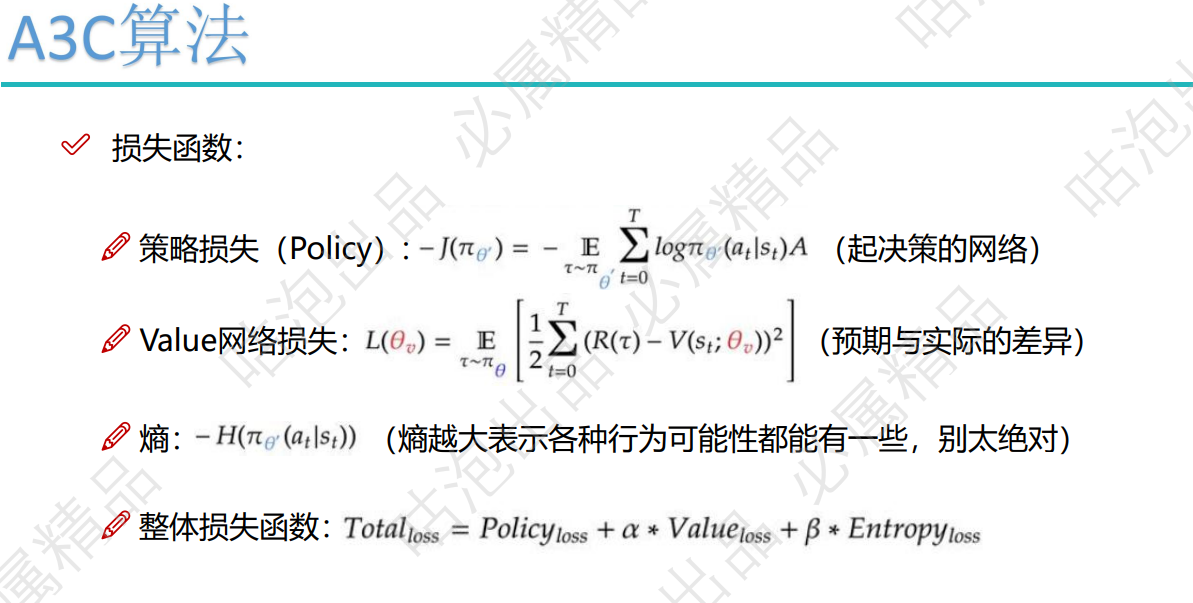
actor_loss = 0
critic_loss = 0
entropy_loss = 0
next_value = R
for value, log_policy, reward, entropy in list(zip(values, log_policies, rewards, entropies))[::-1]:
gae = gae * opt.gamma * opt.tau
gae = gae + reward + opt.gamma * next_value.detach() - value.detach()#Generalized Advantage Estimator 带权重的折扣项,V(s+1)-V(s)
next_value = value
actor_loss = actor_loss + log_policy * gae
R = R * opt.gamma + reward
critic_loss = critic_loss + (R - value) ** 2 / 2
entropy_loss = entropy_loss + entropy
total_loss = -actor_loss + critic_loss - opt.beta * entropy_loss
writer.add_scalar("Train_{}/Loss".format(index), total_loss, curr_episode)
optimizer.zero_grad()
total_loss.backward()
for local_param, global_param in zip(local_model.parameters(), global_model.parameters()):
if global_param.grad isnot None:
break
global_param._grad = local_param.grad
optimizer.step()
if curr_episode == int(opt.num_global_steps / opt.num_local_steps):
print("Training process {} terminated".format(index))
if save:
end_time = timeit.default_timer()
print('The code runs for %.2f s ' % (end_time - start_time))
returndef local_test(index, opt, global_model):
torch.manual_seed(123 + index)
env, num_states, num_actions = create_train_env(opt.world, opt.stage, opt.action_type)
local_model = ActorCritic(num_states, num_actions)
local_model.eval()
state = torch.from_numpy(env.reset())
done = True
curr_step = 0
actions = deque(maxlen=opt.max_actions)
while True:
curr_step += 1
if done:
local_model.load_state_dict(global_model.state_dict())
with torch.no_grad():
if done:
h_0 = torch.zeros((1, 512), dtype=torch.float)
c_0 = torch.zeros((1, 512), dtype=torch.float)
else:
h_0 = h_0.detach()
c_0 = c_0.detach()
logits, value, h_0, c_0 = local_model(state, h_0, c_0)
policy = F.softmax(logits, dim=1)
action = torch.argmax(policy).item()
state, reward, done, _ = env.step(action)
env.render()
actions.append(action)
if curr_step > opt.num_global_steps or actions.count(actions[0]) == actions.maxlen:
done = True
if done:
curr_step = 0
actions.clear()
state = env.reset()
state = torch.from_numpy(state)





【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧