
NLP(四十二):胶囊网络实现文本分类
一、理论学习
1、胶囊结构
胶囊可以看成一种向量化的神经元。对于单个神经元而言,目前的深度网络中流动的数据均为标量。例如多层感知机的某一个神经元,其输入为若干个标量,输出为一个标量(不考虑批处理);而对于胶囊而言,每个神经元输入为若干个向量,输出为一个向量(不考虑批处理)。前向传播如下所示:
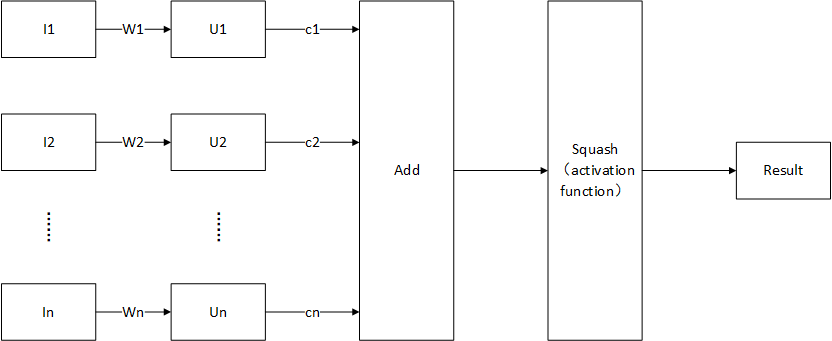
其中Ii为第i个输入(向量),Wi为第i个权值(矩阵),Ui为中间变量(向量),由输入和权值叉乘获得。ci为路由权值(标量),需要注意的是该标量是前向传播过程中决定(使用动态路由算法)的,不是通过反向传播优化的参数。Squash为一种激活函数。前向传播使用公式表示如下所示:
Ui=WiT×IiS=∑i=0nci⋅UiResult=Squash(S)=||S||21+||S||2⋅S||S||
由以上可以看出,胶囊结构中流动的数据类型为向量,其激活函数Squash输入一个向量,输出一个向量。
2、 动态路由算法
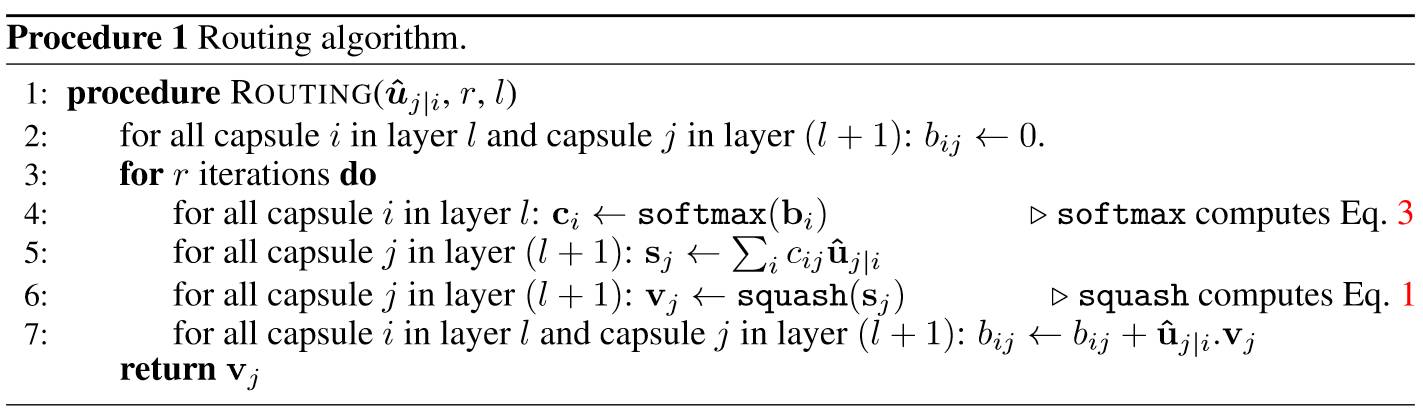
动态路由算法适用于确定胶囊结构中ci的算法,其算法伪代码如下所示:
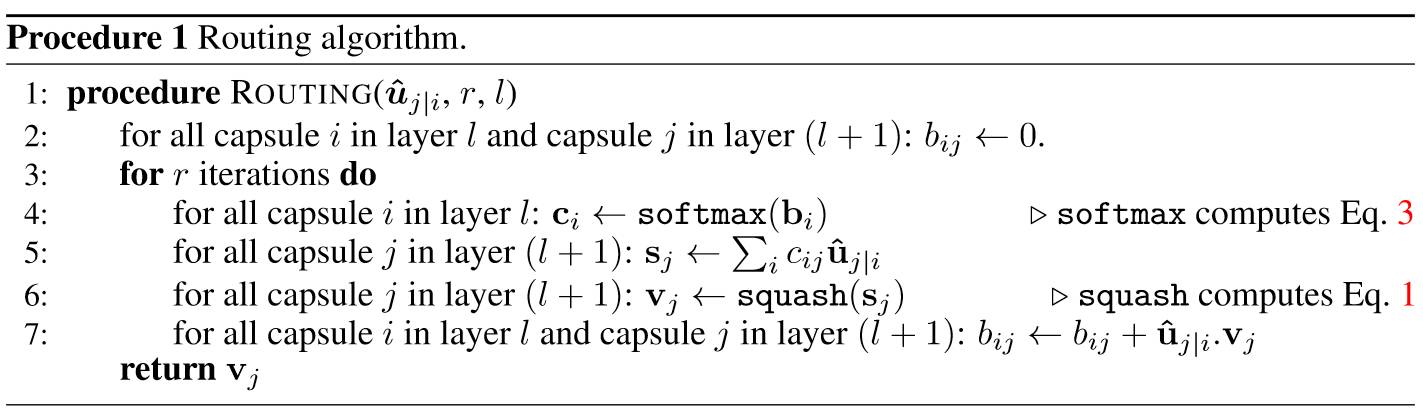
首先其输入为Uj|i为本层的中间变量,其中i为这一层胶囊数量,j为下一层胶囊数量,最终获得的胶囊的输出vj,其步骤描述如下:
- 初始化:初始化一个临时变量b,为一个i×j的全为0的矩阵
- 获取这一步的连接权值c:ci=softmax(bi),将临时变量b通过softmax,保证ci的各分量和为1
- 获取这一步的加权和结果S:$sj = \sum_i c{ij}u_{j|i}$,按这一步连接权值计算加权和
- 非线性激活:vj=squash(sj),经过非线性激活函数,获取这一步的胶囊输出
- 迭代临时变量:$b{ij} = b{ij} + u{i|j} \cdot v{j}$,所这一步的输出与中间变量方向相近,增加临时变量b,即增加权值;若这一步输出与中间变量方向相反,减小临时变量b,即减小权值。
- 若已经迭代到指定次数,输出vj,否侧跳到步骤2
同时,对于迭代次数j,论文中表示过多的迭代会导致过拟合,实践中建议使用3次迭代。
3、输出与代价函数
输出层胶囊的输出为向量,该向量的长度即为概率。也就是说,前向传播的结果为输出最长向量的输出胶囊所代表的结果。反向传播时,也需要考虑网络的输出为向量而不是标量,因此原论文中了如下的代价函数(每个输出的代价函数,代价函数为所有输出代价函数的和L=∑c=0nLc)
Lc=Tcmax(0,m+−||Vc||)2+λ(1−Tc)max(0,||vc||−m−)2
其中,Tc为标量,当分类结果为c时Tc=1,否则Tc=0;λ为固定值(一般为0.5),用于保证数值稳定性;m+和m−也为固定值:
- 对于Tc=1的输出胶囊,当输出向量大于m+时,代价函数为0,否则不为0
- 对于Tc=0的输出胶囊,当输出向量小于m−时,代价函数为0,否则不为0
4、整体架构
原论文中使举了一个识别MNIST手写数字数据集的例子,网络架构如下图所示:
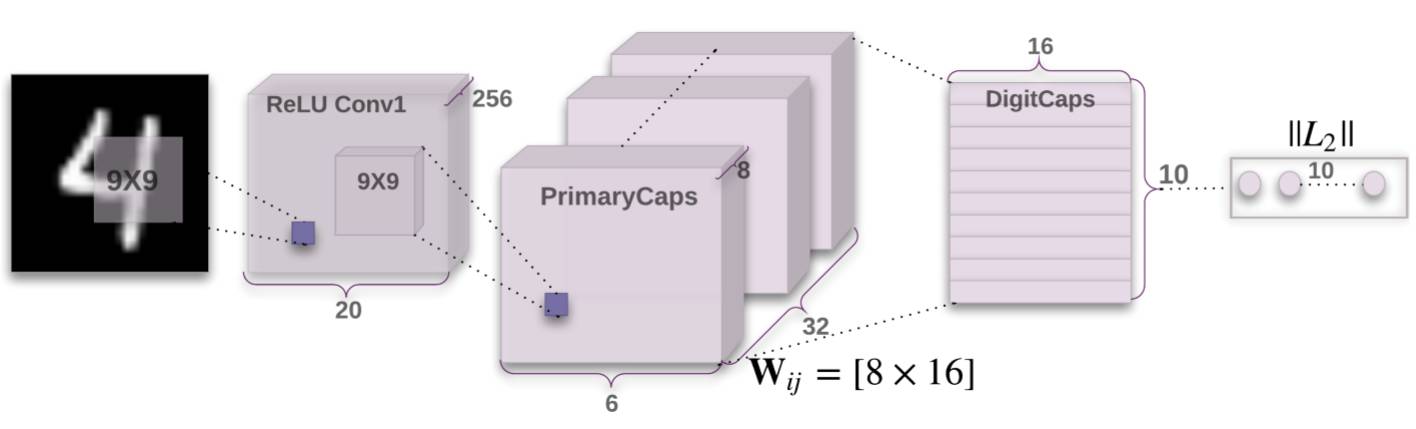
- 第一层为普通的卷积层,使用9*9卷积,输出通道数为256,输出数据尺寸为20*20*256
- 第二层为卷积层,该卷积层由平行的32个卷积层组成,每个卷积层对应向量数据中的一个向量。每个卷积层均为9*9*256*8(输入channel为256,输出channel为8)。因此输出为6*6*32*8,即窗口大小为6*6,输出channel为32,每个数据为8个分量的向量。
- 第三层为胶囊层,行为类似于全连接层。输入为6*6*32=1152个8分量输入向量,输出为10个16分量的向量,对应的有1152*10个权值,每个权值为8*16的矩阵,最终输出为10个16分量的向量
- 最终输出10个16分量的向量,最终的分类结果是向量长度最大的输出。
二、代码阅读(PyTorch)
本次代码阅读并不关心具体的实现方式,主要阅读CapsNet的实现思路
1、前胶囊层(卷积层)
1
|
class PrimaryCaps(nn.Module):
|
重点关注forward前向传播部分:
1
|
def forward(self, x):
|
self.capsules为num_capsules个[in_channels,out_channels,kernel_size,kernel_size]的卷积层,对应上文所述的第二层卷积层的操作。注意该部分的输出直接被变为[batch size,1152,8]的形式,且通过squash激活函数挤压输出向量
2、胶囊层
1
|
class DigitCaps(nn.Module):
|
获得中间向量
1
|
batch_size = x.size(0)
|
这一部分计算中间向量Ui
动态路由
1
|
for iteration in range(num_iterations):
|
动态路由的结构中:
- 第1行计算了softmax函数的结果,对用临时变量b
- 第5行计算加权和
- 第6行计算当前迭代次数的输出
- 第9和10行更新临时向量的值
代价函数
1
|
def margin_loss(self, x, labels, size_average=True):
|
该函数为代价函数,分别实现了两种情况下(Tc=0,Tc=1)的代价函数。
三、参考资料
文字资料参考weakish翻译的Max Pechyonkin的博客:
此外还参考:
四、CapsNet基本结构
参考CapsNet的论文,提出的基本结构如下所示:
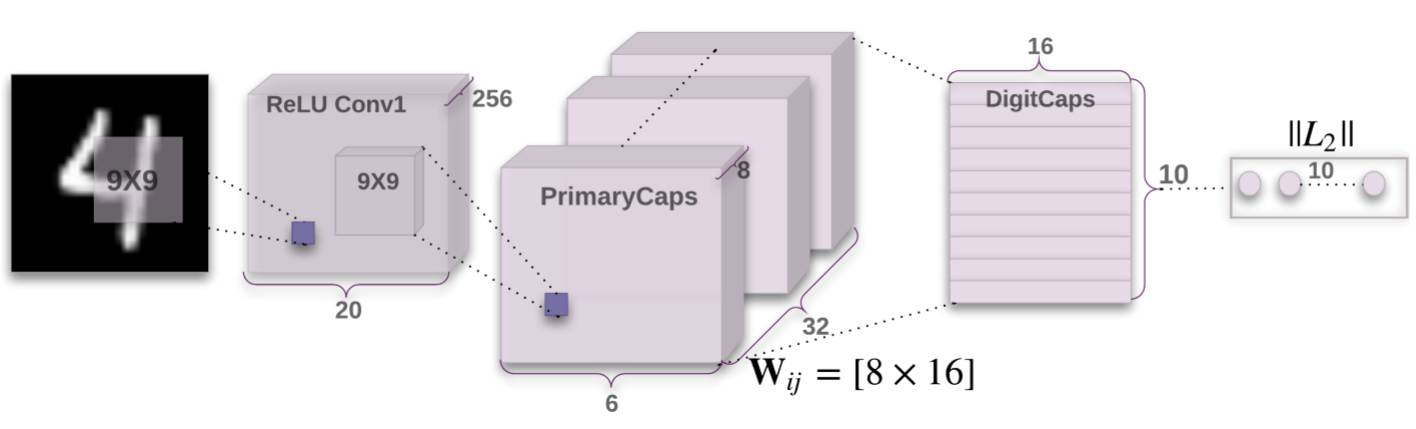
可以看出,CapsNet的基本结构如下所示:
- 普通卷积层Conv1:基本的卷积层,感受野较大,达到了9x9
- 预胶囊层PrimaryCaps:为胶囊层准备,运算为卷积运算,最终输出为[batch,caps_num,caps_length]的三维数据:
- batch为批大小
- caps_num为胶囊的数量
- caps_length为每个胶囊的长度(每个胶囊为一个向量,该向量包括caps_length个分量)
- 胶囊层DigitCaps:胶囊层,目的是代替最后一层全连接层,输出为10个胶囊
五、代码实现
1、胶囊相关组件
激活函数Squash
胶囊网络有特有的激活函数Squash函数:
Squash(S)=||S||21+||S||2⋅S||S||
其中输入为S胶囊,该激活函数可以将胶囊的长度压缩,代码实现如下:
1
|
def squash(inputs, axis=-1):
|
其中:
norm = torch.norm(inputs, p=2, dim=axis, keepdim=True)计算输入胶囊的长度,p=2表示计算的是二范数,keepdim=True表示保持原有的空间形状。scale = norm**2 / (1 + norm**2) / (norm + 1e-8)计算缩放因子,即||S||21+||S||2⋅1||S||return scale * inputs完成计算
预胶囊层PrimaryCaps
1
|
class PrimaryCapsule(nn.Module):
|
预胶囊层使用卷积层实现,其前向传播包括三个部分:
outputs = self.conv2d(x):对输入进行卷积处理,这一步output的形状是[batch,out_channels,p_w,p_h]outputs = outputs.view(x.size(0), -1, self.dim_caps):将4D的卷积输出变为3D的胶囊输出形式,output的形状为[batch,caps_num,dim_caps],其中caps_num为胶囊数量,可自动计算;dim_caps为胶囊长度,需要预先指定。return squash(outputs):激活函数,并返回激活后的胶囊
胶囊层DigitCaps
参数定义
1
|
def __init__(self, in_num_caps, in_dim_caps, out_num_caps, out_dim_caps, routings=3):
|
参数定义如下:
- in_num_caps:输入胶囊的数量
- in_dim_caps:输入胶囊的长度(维数)
- out_num_caps:输出胶囊的数量
- out_dim_caps:输出胶囊的长度(维数)
- routings:动态路由迭代的次数
另外,还定义了权值weight,尺寸为[out_num_caps, in_num_caps, out_dim_caps, in_dim_caps],即每个输出和每个输出胶囊都有连接
前向传播
1
|
def forward(self, x):
|
前向传播分为两个部分:输入映射和动态路由。输入映射如下所示:
x_hat = torch.squeeze(torch.matmul(self.weight, x[:, None, :, :, None]), dim=-1)x[:, None, :, :, None]将数据维度从[batch, in_num_caps, in_dim_caps]扩展到[batch, 1,in_num_caps, in_dim_caps,1]torch.matmul()将weight和扩展后的输入相乘,weight的尺寸是[out_num_caps, in_num_caps, out_dim_caps, in_dim_caps],相乘后结果尺寸为[batch, out_num_caps, in_num_caps,out_dim_caps, 1]torch.squeeze()去除多余的维度,去除后结果尺寸[batch,out_num_caps,in_num_caps,out_dim_caps]
x_hat_detached = x_hat.detach()截断梯度反向传播
这一部分结束后,每个输入胶囊都产生了out_num_caps个输出胶囊,所以目前共有in_num_caps*out_num_caps个胶囊,第二部分是动态路由,动态路由的算法图如下所示:
以下部分实现了该过程:
1
|
b = Variable(torch.zeros(x.size(0), self.out_num_caps, self.in_num_caps)).cuda()
|
- 第一部分是softmax函数,使用
c = F.softmax(b, dim=1)实现,该步骤不改变b的尺寸 - 第二部分是计算路由结果:
outputs = squash(torch.sum(c[:, :, :, None] * x_hat, dim=-2, keepdim=True))c[:, :, :, None]扩展c的维度,以便按位置相乘时广播维度torch.sum(c[:, :, :, None] * x_hat, dim=-2, keepdim=True)计算出每个胶囊与对应权值的积,即算法中的sj,同时在倒数第二维上求和,则该步输出的结果尺寸为[batch, out_num_caps, 1,out_dim_caps]- 通过激活函数
squash()
- 第三部分更新权重
b = b + torch.sum(outputs * x_hat_detached, dim=-1),两个按位相乘的变量尺寸分别为[batch, out_num_caps, in_num_caps, out_dim_caps]和[batch, out_num_caps, 1,out_dim_caps],倒数第二维上有广播行为,因此最终结果为[batch, out_num_caps, in_num_caps]
2、其他组件
网络结构
1
|
class CapsuleNet(nn.Module):
|
网络组件包括两个部分:胶囊网络和重建网络,重建网络为多层感知机,根据胶囊的结果重建了图像,这表示胶囊除了包括结果外,还可以包括一些空间信息。
注意胶囊网络的前向传播部分为:
1
|
x = self.relu(self.conv1(x))
|
最终的输出为每个胶囊的二范数,即向量的长度
代价函数
胶囊神经网络的胶囊部分的代价函数如下所示
Lc=Tcmax(0,m+−||Vc||)2+λ(1−Tc)max(0,||vc||−m−)2
以下代码实现了这个部分,其中L为胶囊的代价函数计算,这里m+=0.9,m−=0.1,L_recon为重建的代价函数,为输入图像与复原图像的MSELoss函数。
1
|
def caps_loss(y_true, y_pred, x, x_recon, lam_recon):
|
六、参考
七、代码实战
1、假设文本的batch_size=32, 通道为1,40个字,每个字embedding_dim=200。

import torch import torch.nn as nn import torch.nn.functional as F from torch.autograd import Variable def squash(inputs, axis=-1): """ The non-linear activation used in Capsule. It drives the length of a large vector to near 1 and small vector to 0 :param inputs: vectors to be squashed :param axis: the axis to squash :return: a Tensor with same size as inputs """ norm = torch.norm(inputs, p=2, dim=axis, keepdim=True) scale = norm**2 / (1 + norm**2) / (norm + 1e-8) return scale * inputs class DenseCapsule(nn.Module): """ The dense capsule layer. It is similar to Dense (FC) layer. Dense layer has `in_num` inputs, each is a scalar, the output of the neuron from the former layer, and it has `out_num` output neurons. DenseCapsule just expands the output of the neuron from scalar to vector. So its input size = [None, in_num_caps, in_dim_caps] and output size = \ [None, out_num_caps, out_dim_caps]. For Dense Layer, in_dim_caps = out_dim_caps = 1. :param in_num_caps: number of cpasules inputted to this layer :param in_dim_caps: dimension of input capsules :param out_num_caps: number of capsules outputted from this layer :param out_dim_caps: dimension of output capsules :param routings: number of iterations for the routing algorithm """ def __init__(self, in_num_caps, in_dim_caps, out_num_caps, out_dim_caps, routings=3): super(DenseCapsule, self).__init__() self.in_num_caps = in_num_caps self.in_dim_caps = in_dim_caps self.out_num_caps = out_num_caps self.out_dim_caps = out_dim_caps self.routings = routings self.weight = nn.Parameter(0.01 * torch.randn(out_num_caps, in_num_caps, out_dim_caps, in_dim_caps)) def forward(self, x): print(x.shape) #[32, 32, 8] print(x[:, None, :, :, None].shape) #[32, 1, 32, 8, 1] print(self.weight.shape) #[203, 1152, 16, 8] # x.size=[batch, in_num_caps, in_dim_caps] # expanded to [batch, 1, in_num_caps, in_dim_caps, 1] # weight.size =[ out_num_caps, in_num_caps, out_dim_caps, in_dim_caps] # torch.matmul: [out_dim_caps, in_dim_caps] x [in_dim_caps, 1] -> [out_dim_caps, 1] # => x_hat.size =[batch, out_num_caps, in_num_caps, out_dim_caps] x_hat = torch.squeeze(torch.matmul(self.weight, x[:, None, :, :, None]), dim=-1) # In forward pass, `x_hat_detached` = `x_hat`; # In backward, no gradient can flow from `x_hat_detached` back to `x_hat`. x_hat_detached = x_hat.detach() # The prior for coupling coefficient, initialized as zeros. # b.size = [batch, out_num_caps, in_num_caps] b = Variable(torch.zeros(x.size(0), self.out_num_caps, self.in_num_caps)) assert self.routings > 0, 'The \'routings\' should be > 0.' for i in range(self.routings): # c.size = [batch, out_num_caps, in_num_caps] c = F.softmax(b, dim=1) # At last iteration, use `x_hat` to compute `outputs` in order to backpropagate gradient if i == self.routings - 1: # c.size expanded to [batch, out_num_caps, in_num_caps, 1 ] # x_hat.size = [batch, out_num_caps, in_num_caps, out_dim_caps] # => outputs.size= [batch, out_num_caps, 1, out_dim_caps] outputs = squash(torch.sum(c[:, :, :, None] * x_hat, dim=-2, keepdim=True)) # outputs = squash(torch.matmul(c[:, :, None, :], x_hat)) # alternative way else: # Otherwise, use `x_hat_detached` to update `b`. No gradients flow on this path. outputs = squash(torch.sum(c[:, :, :, None] * x_hat_detached, dim=-2, keepdim=True)) # outputs = squash(torch.matmul(c[:, :, None, :], x_hat_detached)) # alternative way # outputs.size =[batch, out_num_caps, 1, out_dim_caps] # x_hat_detached.size=[batch, out_num_caps, in_num_caps, out_dim_caps] # => b.size =[batch, out_num_caps, in_num_caps] b = b + torch.sum(outputs * x_hat_detached, dim=-1) return torch.squeeze(outputs, dim=-2) class PrimaryCapsule(nn.Module): """ Apply Conv2D with `out_channels` and then reshape to get capsules :param in_channels: input channels :param out_channels: output channels :param dim_caps: dimension of capsule :param kernel_size: kernel size :return: output tensor, size=[batch, num_caps, dim_caps] """ def __init__(self, in_channels, out_channels, dim_caps, kernel_size, stride=1, padding=0): super(PrimaryCapsule, self).__init__() self.dim_caps = dim_caps self.conv2d = nn.Conv2d(in_channels, out_channels, kernel_size=kernel_size, stride=stride, padding=padding) def forward(self, x): print(x.shape) #[32, 256, 37, 1] outputs = self.conv2d(x) outputs = outputs.view(x.size(0), -1, self.dim_caps) return squash(outputs) class CapsuleNet(nn.Module): """ A Capsule Network on MNIST. :param input_size: data size = [channels, width, height] :param classes: number of classes :param routings: number of routing iterations Shape: - Input: (batch, channels, width, height), optional (batch, classes) . - Output:((batch, classes), (batch, channels, width, height)) """ def __init__(self, input_size, classes, routings): super(CapsuleNet, self).__init__() self.input_size = input_size self.classes = classes self.routings = routings # Layer 1: Just a conventional Conv2D layer self.conv1 = nn.Conv2d(input_size[0], 256, kernel_size=(4, 200), stride=1, padding=0) # Layer 2: Conv2D layer with `squash` activation, then reshape to [None, num_caps, dim_caps] self.primarycaps = PrimaryCapsule(256, 256, 8, kernel_size=(37, 1), stride=2, padding=0) # Layer 3: Capsule layer. Routing algorithm works here. self.digitcaps = DenseCapsule(in_num_caps=32, in_dim_caps=8, out_num_caps=classes, out_dim_caps=16, routings=routings) # Decoder network. self.decoder = nn.Sequential( nn.Linear(16*classes, 512), nn.ReLU(inplace=True), nn.Linear(512, 1024), nn.ReLU(inplace=True), nn.Linear(1024, input_size[0] * input_size[1] * input_size[2]), nn.Sigmoid() ) self.relu = nn.ReLU() def forward(self, x, y=None): x = self.relu(self.conv1(x)) x = self.primarycaps(x) x = self.digitcaps(x) length = x.norm(dim=-1) if y is None: # during testing, no label given. create one-hot coding using `length` index = length.max(dim=1)[1] y = Variable(torch.zeros(length.size()).scatter_(1, index.view(-1, 1).cpu().data, 1.)) reconstruction = self.decoder((x * y[:, :, None]).view(x.size(0), -1)) return length, reconstruction.view(-1, *self.input_size) if __name__ == '__main__': x = torch.rand([16, 1, 40, 200]) m = CapsuleNet([1, 40, 200], 203, 3) y_pred, x_recon = m(x) print(y_pred.shape)
2、官方的训练代码,仅供参考
""" Pytorch implementation of CapsNet in paper Dynamic Routing Between Capsules. The current version maybe only works for TensorFlow backend. Actually it will be straightforward to re-write to TF code. Adopting to other backends should be easy, but I have not tested this. Usage: Launch `python CapsNet.py -h` for usage help Result: Validation accuracy > 99.6% after 50 epochs. Speed: About 73s/epoch on a single GTX1070 GPU card and 43s/epoch on a GTX1080Ti GPU. Author: Xifeng Guo, E-mail: `guoxifeng1990@163.com`, Github: `https://github.com/XifengGuo/CapsNet-Pytorch` """ import torch from torch import nn from torch.optim import Adam, lr_scheduler from torch.autograd import Variable from torchvision import transforms, datasets from capsulelayers import DenseCapsule, PrimaryCapsule class CapsuleNet(nn.Module): """ A Capsule Network on MNIST. :param input_size: data size = [channels, width, height] :param classes: number of classes :param routings: number of routing iterations Shape: - Input: (batch, channels, width, height), optional (batch, classes) . - Output:((batch, classes), (batch, channels, width, height)) """ def __init__(self, input_size, classes, routings): super(CapsuleNet, self).__init__() self.input_size = input_size self.classes = classes self.routings = routings # Layer 1: Just a conventional Conv2D layer self.conv1 = nn.Conv2d(input_size[0], 256, kernel_size=9, stride=1, padding=0) # Layer 2: Conv2D layer with `squash` activation, then reshape to [None, num_caps, dim_caps] self.primarycaps = PrimaryCapsule(256, 256, 8, kernel_size=9, stride=2, padding=0) # Layer 3: Capsule layer. Routing algorithm works here. self.digitcaps = DenseCapsule(in_num_caps=32*6*6, in_dim_caps=8, out_num_caps=classes, out_dim_caps=16, routings=routings) # Decoder network. self.decoder = nn.Sequential( nn.Linear(16*classes, 512), nn.ReLU(inplace=True), nn.Linear(512, 1024), nn.ReLU(inplace=True), nn.Linear(1024, input_size[0] * input_size[1] * input_size[2]), nn.Sigmoid() ) self.relu = nn.ReLU() def forward(self, x, y=None): x = self.relu(self.conv1(x)) x = self.primarycaps(x) x = self.digitcaps(x) length = x.norm(dim=-1) if y is None: # during testing, no label given. create one-hot coding using `length` index = length.max(dim=1)[1] y = Variable(torch.zeros(length.size()).scatter_(1, index.view(-1, 1).cpu().data, 1.).cuda()) reconstruction = self.decoder((x * y[:, :, None]).view(x.size(0), -1)) return length, reconstruction.view(-1, *self.input_size) def caps_loss(y_true, y_pred, x, x_recon, lam_recon): """ Capsule loss = Margin loss + lam_recon * reconstruction loss. :param y_true: true labels, one-hot coding, size=[batch, classes] :param y_pred: predicted labels by CapsNet, size=[batch, classes] :param x: input data, size=[batch, channels, width, height] :param x_recon: reconstructed data, size is same as `x` :param lam_recon: coefficient for reconstruction loss :return: Variable contains a scalar loss value. """ L = y_true * torch.clamp(0.9 - y_pred, min=0.) ** 2 + \ 0.5 * (1 - y_true) * torch.clamp(y_pred - 0.1, min=0.) ** 2 L_margin = L.sum(dim=1).mean() L_recon = nn.MSELoss()(x_recon, x) return L_margin + lam_recon * L_recon def show_reconstruction(model, test_loader, n_images, args): import matplotlib.pyplot as plt from utils import combine_images from PIL import Image import numpy as np model.eval() for x, _ in test_loader: x = Variable(x[:min(n_images, x.size(0))].cuda(), volatile=True) _, x_recon = model(x) data = np.concatenate([x.data, x_recon.data]) img = combine_images(np.transpose(data, [0, 2, 3, 1])) image = img * 255 Image.fromarray(image.astype(np.uint8)).save(args.save_dir + "/real_and_recon.png") print() print('Reconstructed images are saved to %s/real_and_recon.png' % args.save_dir) print('-' * 70) plt.imshow(plt.imread(args.save_dir + "/real_and_recon.png", )) plt.show() break def test(model, test_loader, args): model.eval() test_loss = 0 correct = 0 for x, y in test_loader: y = torch.zeros(y.size(0), 10).scatter_(1, y.view(-1, 1), 1.) x, y = Variable(x.cuda(), volatile=True), Variable(y.cuda()) y_pred, x_recon = model(x) test_loss += caps_loss(y, y_pred, x, x_recon, args.lam_recon).data[0] * x.size(0) # sum up batch loss y_pred = y_pred.data.max(1)[1] y_true = y.data.max(1)[1] correct += y_pred.eq(y_true).cpu().sum() test_loss /= len(test_loader.dataset) return test_loss, correct / len(test_loader.dataset) def train(model, train_loader, test_loader, args): """ Training a CapsuleNet :param model: the CapsuleNet model :param train_loader: torch.utils.data.DataLoader for training data :param test_loader: torch.utils.data.DataLoader for test data :param args: arguments :return: The trained model """ print('Begin Training' + '-'*70) from time import time import csv logfile = open(args.save_dir + '/log.csv', 'w') logwriter = csv.DictWriter(logfile, fieldnames=['epoch', 'loss', 'val_loss', 'val_acc']) logwriter.writeheader() t0 = time() optimizer = Adam(model.parameters(), lr=args.lr) lr_decay = lr_scheduler.ExponentialLR(optimizer, gamma=args.lr_decay) best_val_acc = 0. for epoch in range(args.epochs): model.train() # set to training mode lr_decay.step() # decrease the learning rate by multiplying a factor `gamma` ti = time() training_loss = 0.0 for i, (x, y) in enumerate(train_loader): # batch training y = torch.zeros(y.size(0), 10).scatter_(1, y.view(-1, 1), 1.) # change to one-hot coding x, y = Variable(x.cuda()), Variable(y.cuda()) # convert input data to GPU Variable optimizer.zero_grad() # set gradients of optimizer to zero y_pred, x_recon = model(x, y) # forward loss = caps_loss(y, y_pred, x, x_recon, args.lam_recon) # compute loss loss.backward() # backward, compute all gradients of loss w.r.t all Variables training_loss += loss.data[0] * x.size(0) # record the batch loss optimizer.step() # update the trainable parameters with computed gradients # compute validation loss and acc val_loss, val_acc = test(model, test_loader, args) logwriter.writerow(dict(epoch=epoch, loss=training_loss / len(train_loader.dataset), val_loss=val_loss, val_acc=val_acc)) print("==> Epoch %02d: loss=%.5f, val_loss=%.5f, val_acc=%.4f, time=%ds" % (epoch, training_loss / len(train_loader.dataset), val_loss, val_acc, time() - ti)) if val_acc > best_val_acc: # update best validation acc and save model best_val_acc = val_acc torch.save(model.state_dict(), args.save_dir + '/epoch%d.pkl' % epoch) print("best val_acc increased to %.4f" % best_val_acc) logfile.close() torch.save(model.state_dict(), args.save_dir + '/trained_model.pkl') print('Trained model saved to \'%s/trained_model.h5\'' % args.save_dir) print("Total time = %ds" % (time() - t0)) print('End Training' + '-' * 70) return model def load_mnist(path='./data', download=False, batch_size=100, shift_pixels=2): """ Construct dataloaders for training and test data. Data augmentation is also done here. :param path: file path of the dataset :param download: whether to download the original data :param batch_size: batch size :param shift_pixels: maximum number of pixels to shift in each direction :return: train_loader, test_loader """ kwargs = {'num_workers': 1, 'pin_memory': True} train_loader = torch.utils.data.DataLoader( datasets.MNIST(path, train=True, download=download, transform=transforms.Compose([transforms.RandomCrop(size=28, padding=shift_pixels), transforms.ToTensor()])), batch_size=batch_size, shuffle=True, **kwargs) test_loader = torch.utils.data.DataLoader( datasets.MNIST(path, train=False, download=download, transform=transforms.ToTensor()), batch_size=batch_size, shuffle=True, **kwargs) return train_loader, test_loader if __name__ == "__main__": import argparse import os # setting the hyper parameters parser = argparse.ArgumentParser(description="Capsule Network on MNIST.") parser.add_argument('--epochs', default=50, type=int) parser.add_argument('--batch_size', default=100, type=int) parser.add_argument('--lr', default=0.001, type=float, help="Initial learning rate") parser.add_argument('--lr_decay', default=0.9, type=float, help="The value multiplied by lr at each epoch. Set a larger value for larger epochs") parser.add_argument('--lam_recon', default=0.0005 * 784, type=float, help="The coefficient for the loss of decoder") parser.add_argument('-r', '--routings', default=3, type=int, help="Number of iterations used in routing algorithm. should > 0") # num_routing should > 0 parser.add_argument('--shift_pixels', default=2, type=int, help="Number of pixels to shift at most in each direction.") parser.add_argument('--data_dir', default='./data', help="Directory of data. If no data, use \'--download\' flag to download it") parser.add_argument('--download', action='store_true', help="Download the required data.") parser.add_argument('--save_dir', default='./result') parser.add_argument('-t', '--testing', action='store_true', help="Test the trained model on testing dataset") parser.add_argument('-w', '--weights', default=None, help="The path of the saved weights. Should be specified when testing") args = parser.parse_args() print(args) if not os.path.exists(args.save_dir): os.makedirs(args.save_dir) # load data train_loader, test_loader = load_mnist(args.data_dir, download=False, batch_size=args.batch_size) # define model model = CapsuleNet(input_size=[1, 28, 28], classes=10, routings=3) model.cuda() print(model) # train or test if args.weights is not None: # init the model weights with provided one model.load_state_dict(torch.load(args.weights)) if not args.testing: train(model, train_loader, test_loader, args) else: # testing if args.weights is None: print('No weights are provided. Will test using random initialized weights.') test_loss, test_acc = test(model=model, test_loader=test_loader, args=args) print('test acc = %.4f, test loss = %.5f' % (test_acc, test_loss)) show_reconstruction(model, test_loader, 50, args)
import torch import torch.nn as nn import torch.nn.functional as F from torch.autograd import Variable from torch.optim import Adam, lr_scheduler def squash(inputs, axis=-1): """ The non-linear activation used in Capsule. It drives the length of a large vector to near 1 and small vector to 0 :param inputs: vectors to be squashed :param axis: the axis to squash :return: a Tensor with same size as inputs """ norm = torch.norm(inputs, p=2, dim=axis, keepdim=True) scale = norm**2 / (1 + norm**2) / (norm + 1e-8) return scale * inputs class DenseCapsule(nn.Module): """ The dense capsule layer. It is similar to Dense (FC) layer. Dense layer has `in_num` inputs, each is a scalar, the output of the neuron from the former layer, and it has `out_num` output neurons. DenseCapsule just expands the output of the neuron from scalar to vector. So its input size = [None, in_num_caps, in_dim_caps] and output size = \ [None, out_num_caps, out_dim_caps]. For Dense Layer, in_dim_caps = out_dim_caps = 1. :param in_num_caps: number of cpasules inputted to this layer :param in_dim_caps: dimension of input capsules :param out_num_caps: number of capsules outputted from this layer :param out_dim_caps: dimension of output capsules :param routings: number of iterations for the routing algorithm """ def __init__(self, in_num_caps, in_dim_caps, out_num_caps, out_dim_caps, routings=3): super(DenseCapsule, self).__init__() self.in_num_caps = in_num_caps self.in_dim_caps = in_dim_caps self.out_num_caps = out_num_caps self.out_dim_caps = out_dim_caps self.routings = routings self.weight = nn.Parameter(0.01 * torch.randn(out_num_caps, in_num_caps, out_dim_caps, in_dim_caps)) def forward(self, x): print(x.shape) #[32, 32, 8] print(x[:, None, :, :, None].shape) #[32, 1, 32, 8, 1] print(self.weight.shape) #[203, 1152, 16, 8] # x.size=[batch, in_num_caps, in_dim_caps] # expanded to [batch, 1, in_num_caps, in_dim_caps, 1] # weight.size =[ out_num_caps, in_num_caps, out_dim_caps, in_dim_caps] # torch.matmul: [out_dim_caps, in_dim_caps] x [in_dim_caps, 1] -> [out_dim_caps, 1] # => x_hat.size =[batch, out_num_caps, in_num_caps, out_dim_caps] x_hat = torch.squeeze(torch.matmul(self.weight, x[:, None, :, :, None]), dim=-1) # In forward pass, `x_hat_detached` = `x_hat`; # In backward, no gradient can flow from `x_hat_detached` back to `x_hat`. x_hat_detached = x_hat.detach() # The prior for coupling coefficient, initialized as zeros. # b.size = [batch, out_num_caps, in_num_caps] b = Variable(torch.zeros(x.size(0), self.out_num_caps, self.in_num_caps)) assert self.routings > 0, 'The \'routings\' should be > 0.' for i in range(self.routings): # c.size = [batch, out_num_caps, in_num_caps] c = F.softmax(b, dim=1) # At last iteration, use `x_hat` to compute `outputs` in order to backpropagate gradient if i == self.routings - 1: # c.size expanded to [batch, out_num_caps, in_num_caps, 1 ] # x_hat.size = [batch, out_num_caps, in_num_caps, out_dim_caps] # => outputs.size= [batch, out_num_caps, 1, out_dim_caps] outputs = squash(torch.sum(c[:, :, :, None] * x_hat, dim=-2, keepdim=True)) # outputs = squash(torch.matmul(c[:, :, None, :], x_hat)) # alternative way else: # Otherwise, use `x_hat_detached` to update `b`. No gradients flow on this path. outputs = squash(torch.sum(c[:, :, :, None] * x_hat_detached, dim=-2, keepdim=True)) # outputs = squash(torch.matmul(c[:, :, None, :], x_hat_detached)) # alternative way # outputs.size =[batch, out_num_caps, 1, out_dim_caps] # x_hat_detached.size=[batch, out_num_caps, in_num_caps, out_dim_caps] # => b.size =[batch, out_num_caps, in_num_caps] b = b + torch.sum(outputs * x_hat_detached, dim=-1) return torch.squeeze(outputs, dim=-2) class PrimaryCapsule(nn.Module): """ Apply Conv2D with `out_channels` and then reshape to get capsules :param in_channels: input channels :param out_channels: output channels :param dim_caps: dimension of capsule :param kernel_size: kernel size :return: output tensor, size=[batch, num_caps, dim_caps] """ def __init__(self, in_channels, out_channels, dim_caps, kernel_size, stride=1, padding=0): super(PrimaryCapsule, self).__init__() self.dim_caps = dim_caps self.conv2d = nn.Conv2d(in_channels, out_channels, kernel_size=kernel_size, stride=stride, padding=padding) def forward(self, x): print(x.shape) #[32, 256, 37, 1] outputs = self.conv2d(x) outputs = outputs.view(x.size(0), -1, self.dim_caps) return squash(outputs) class CapsuleNet(nn.Module): """ A Capsule Network on MNIST. :param input_size: data size = [channels, width, height] :param classes: number of classes :param routings: number of routing iterations Shape: - Input: (batch, channels, width, height), optional (batch, classes) . - Output:((batch, classes), (batch, channels, width, height)) """ def __init__(self, input_size, classes, routings): super(CapsuleNet, self).__init__() self.input_size = input_size self.classes = classes self.routings = routings # Layer 1: Just a conventional Conv2D layer self.conv1 = nn.Conv2d(input_size[0], 256, kernel_size=(4, 200), stride=1, padding=0) # Layer 2: Conv2D layer with `squash` activation, then reshape to [None, num_caps, dim_caps] self.primarycaps = PrimaryCapsule(256, 256, 8, kernel_size=(37, 1), stride=2, padding=0) # Layer 3: Capsule layer. Routing algorithm works here. self.digitcaps = DenseCapsule(in_num_caps=32, in_dim_caps=8, out_num_caps=classes, out_dim_caps=16, routings=routings) # Decoder network. self.decoder = nn.Sequential( nn.Linear(16*classes, 512), nn.ReLU(inplace=True), nn.Linear(512, 1024), nn.ReLU(inplace=True), nn.Linear(1024, input_size[0] * input_size[1] * input_size[2]), nn.Sigmoid() ) self.relu = nn.ReLU() def forward(self, x, y=None): x = self.relu(self.conv1(x)) x = self.primarycaps(x) x = self.digitcaps(x) length = x.norm(dim=-1) if y is None: # during testing, no label given. create one-hot coding using `length` index = length.max(dim=1)[1] y = Variable(torch.zeros(length.size()).scatter_(1, index.view(-1, 1).cpu().data, 1.)) reconstruction = self.decoder((x * y[:, :, None]).view(x.size(0), -1)) return length, reconstruction.view(-1, *self.input_size) def caps_loss(y_true, y_pred, x, x_recon, lam_recon): """ Capsule loss = Margin loss + lam_recon * reconstruction loss. :param y_true: true labels, one-hot coding, size=[batch, classes] :param y_pred: predicted labels by CapsNet, size=[batch, classes] :param x: input data, size=[batch, channels, width, height] :param x_recon: reconstructed data, size is same as `x` :param lam_recon: coefficient for reconstruction loss :return: Variable contains a scalar loss value. """ L = y_true * torch.clamp(0.9 - y_pred, min=0.) ** 2 + \ 0.5 * (1 - y_true) * torch.clamp(y_pred - 0.1, min=0.) ** 2 L_margin = L.sum(dim=1).mean() L_recon = nn.MSELoss()(x_recon, x) return L_margin + lam_recon * L_recon def test(model, test_loader, args): model.eval() test_loss = 0 correct = 0 for x, y in test_loader: y = torch.zeros(y.size(0), 10).scatter_(1, y.view(-1, 1), 1.) x, y = Variable(x.cuda(), volatile=True), Variable(y.cuda()) y_pred, x_recon = model(x) test_loss += caps_loss(y, y_pred, x, x_recon, args.lam_recon).data[0] * x.size(0) # sum up batch loss y_pred = y_pred.data.max(1)[1] y_true = y.data.max(1)[1] correct += y_pred.eq(y_true).cpu().sum() test_loss /= len(test_loader.dataset) return test_loss, correct / len(test_loader.dataset) def train(model, train_loader, test_loader, args): """ Training a CapsuleNet :param model: the CapsuleNet model :param train_loader: torch.utils.data.DataLoader for training data :param test_loader: torch.utils.data.DataLoader for test data :param args: arguments :return: The trained model """ print('Begin Training' + '-'*70) from time import time import csv logfile = open(args.save_dir + '/log.csv', 'w') logwriter = csv.DictWriter(logfile, fieldnames=['epoch', 'loss', 'val_loss', 'val_acc']) logwriter.writeheader() t0 = time() optimizer = Adam(model.parameters(), lr=args.lr) lr_decay = lr_scheduler.ExponentialLR(optimizer, gamma=args.lr_decay) best_val_acc = 0. for epoch in range(args.epochs): model.train() # set to training mode lr_decay.step() # decrease the learning rate by multiplying a factor `gamma` ti = time() training_loss = 0.0 for i, (x, y) in enumerate(train_loader): # batch training y = torch.zeros(y.size(0), 10).scatter_(1, y.view(-1, 1), 1.) # change to one-hot coding x, y = Variable(x.cuda()), Variable(y.cuda()) # convert input data to GPU Variable optimizer.zero_grad() # set gradients of optimizer to zero y_pred, x_recon = model(x, y) # forward loss = caps_loss(y, y_pred, x, x_recon, args.lam_recon) # compute loss loss.backward() # backward, compute all gradients of loss w.r.t all Variables training_loss += loss.data[0] * x.size(0) # record the batch loss optimizer.step() # update the trainable parameters with computed gradients # compute validation loss and acc val_loss, val_acc = test(model, test_loader, args) logwriter.writerow(dict(epoch=epoch, loss=training_loss / len(train_loader.dataset), val_loss=val_loss, val_acc=val_acc)) print("==> Epoch %02d: loss=%.5f, val_loss=%.5f, val_acc=%.4f, time=%ds" % (epoch, training_loss / len(train_loader.dataset), val_loss, val_acc, time() - ti)) if val_acc > best_val_acc: # update best validation acc and save model best_val_acc = val_acc torch.save(model.state_dict(), args.save_dir + '/epoch%d.pkl' % epoch) print("best val_acc increased to %.4f" % best_val_acc) logfile.close() torch.save(model.state_dict(), args.save_dir + '/trained_model.pkl') print('Trained model saved to \'%s/trained_model.h5\'' % args.save_dir) print("Total time = %ds" % (time() - t0)) print('End Training' + '-' * 70) return model if __name__ == '__main__': x = torch.rand([16, 1, 40, 200]) m = CapsuleNet([1, 40, 200], 203, 3) y_pred, x_recon = m(x) print(y_pred.shape) import argparse import os # setting the hyper parameters parser = argparse.ArgumentParser(description="Capsule Network on MNIST.") parser.add_argument('--epochs', default=50, type=int) parser.add_argument('--batch_size', default=100, type=int) parser.add_argument('--lr', default=0.001, type=float, help="Initial learning rate") parser.add_argument('--lr_decay', default=0.9, type=float, help="The value multiplied by lr at each epoch. Set a larger value for larger epochs") parser.add_argument('--lam_recon', default=0.0005 * 784, type=float, help="The coefficient for the loss of decoder") parser.add_argument('-r', '--routings', default=3, type=int, help="Number of iterations used in routing algorithm. should > 0") # num_routing should > 0 parser.add_argument('--shift_pixels', default=2, type=int, help="Number of pixels to shift at most in each direction.") parser.add_argument('--data_dir', default='./data', help="Directory of data. If no data, use \'--download\' flag to download it") parser.add_argument('--download', action='store_true', help="Download the required data.") parser.add_argument('--save_dir', default='./result') parser.add_argument('-t', '--testing', action='store_true', help="Test the trained model on testing dataset") parser.add_argument('-w', '--weights', default=None, help="The path of the saved weights. Should be specified when testing") args = parser.parse_args() print(args) if not os.path.exists(args.save_dir): os.makedirs(args.save_dir) # load data train_loader, test_loader = load_data(args.data_dir, download=False, batch_size=args.batch_size) # define model model = CapsuleNet(input_size=[1, 28, 28], classes=10, routings=3) print(model) # train or test if args.weights is not None: # init the model weights with provided one model.load_state_dict(torch.load(args.weights)) if not args.testing: train(model, train_loader, test_loader, args) else: # testing if args.weights is None: print('No weights are provided. Will test using random initialized weights.') test_loss, test_acc = test(model=model, test_loader=test_loader, args=args) print('test acc = %.4f, test loss = %.5f' % (test_acc, test_loss))


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 全程不用写代码,我用AI程序员写了一个飞机大战
· DeepSeek 开源周回顾「GitHub 热点速览」
· 记一次.NET内存居高不下排查解决与启示
· MongoDB 8.0这个新功能碉堡了,比商业数据库还牛
· .NET10 - 预览版1新功能体验(一)