nlp入门(五)隐马尔科夫模型
源码请到:自然语言处理练习: 学习自然语言处理时候写的一些代码 (gitee.com)
一、马尔科夫模型概念
1.1 马尔科夫模型:具有马尔可夫性质并以随机过程为基础的模型
1.2 马尔科夫性质:过去状态只能影响现在状态,影响不了将来的状态
1.3 马尔科夫过程:随机过程满足马尔科夫性质,状态转移矩阵不会随着时间的变化而发生变化
1.4 马尔科夫模型举例
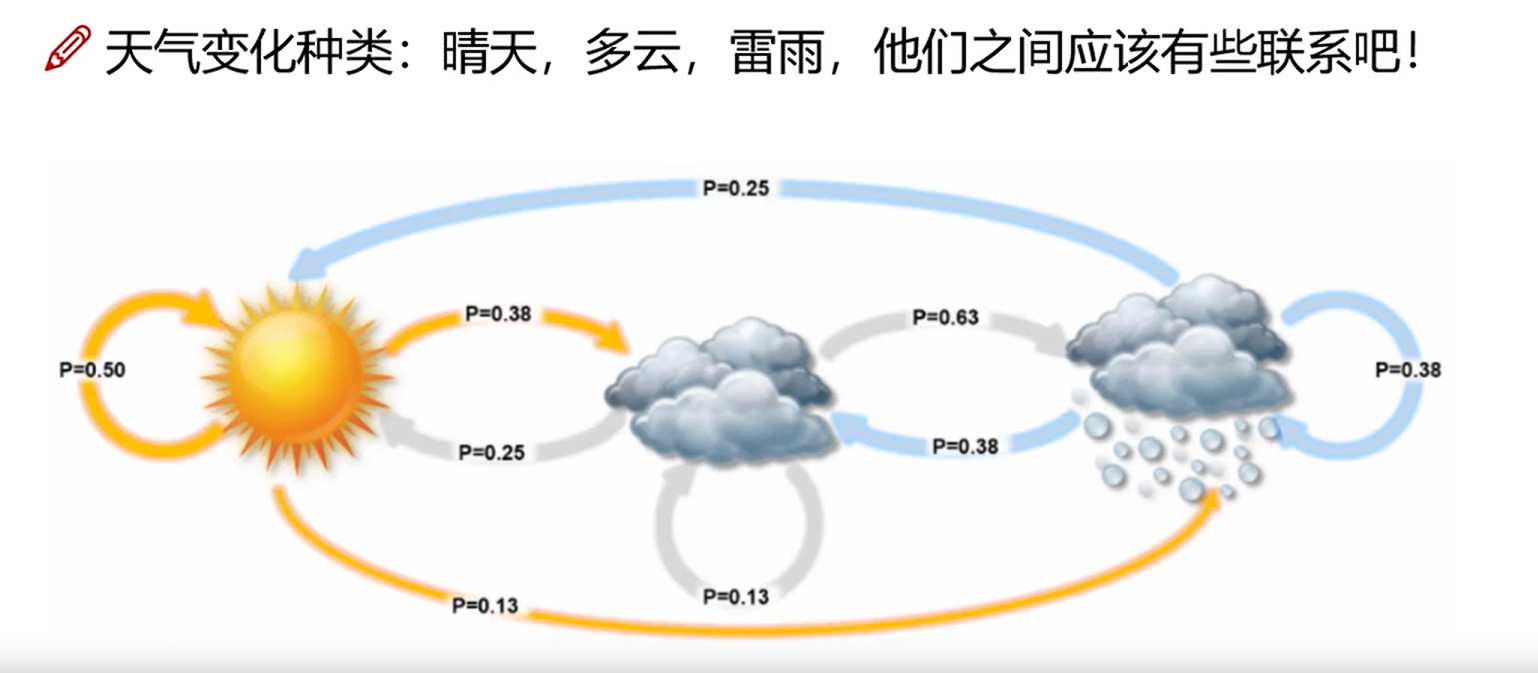
如图所示,天气有晴天、多云、雷雨三种状态,三种状态之间的变换是随机的,并且三种之间的状态概率是固定的,并且昨天的天气只能影响今天的天气,对明天的天气无法产生影响,就是一个马尔科夫模型。
二、隐马尔科夫模型
2.1 在马尔科夫模型中,无法直观的观察到状态,仅仅可以观测到表象,则称之为隐马尔科夫模型。
2.2 举例:在第一节的例子中,如果是在热带雨林中,看不见天所以无法直接观测到天气的情况,但是可以通过观察海藻的生长状态来判断当前的天气,这就是个隐马尔科夫模型
2.3 隐马尔科夫模型的表示
隐马尔科夫模型可以表示为:
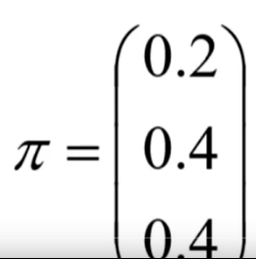
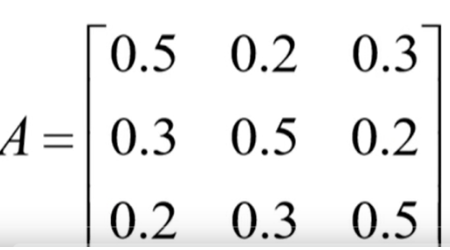
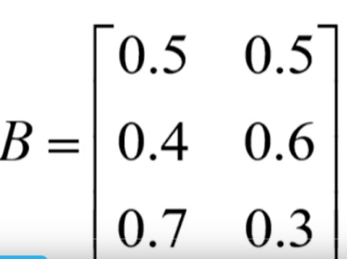
其中π为初始状态,A为状态转移概率矩阵,B为生成观测状态概率矩阵
2.4 隐马尔科夫模型要解决的问题
2.4.1 给定模型λ=(A,B,π)及观测序列O={o1,o2……oT} 计算其出现的概率P(O|λ)
- 暴力求解法
推导过程如下:
![]()
其中
![]()
其中
![]()
![]() 就是B矩阵的内容
就是B矩阵的内容
所以

最终

时间复杂度为O(TNT) N为隐藏状态个数, 指数次复杂度,比较难得出结果
- 前向算法
在给定t时刻隐藏状态为i,观测序列为{O1,O2……OT}的概率叫做前向概率

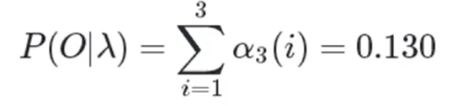
那么我们只需要求得T时刻所有隐藏状态的前向概率就可以了
又可以得到
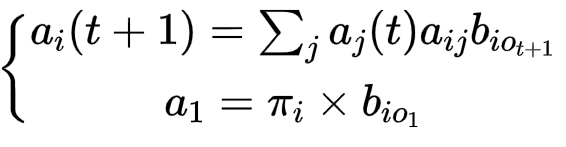
有了递推公式,则这个问题被转移成了一个动态规划,时间复杂度变为了O(N2T)
举例:
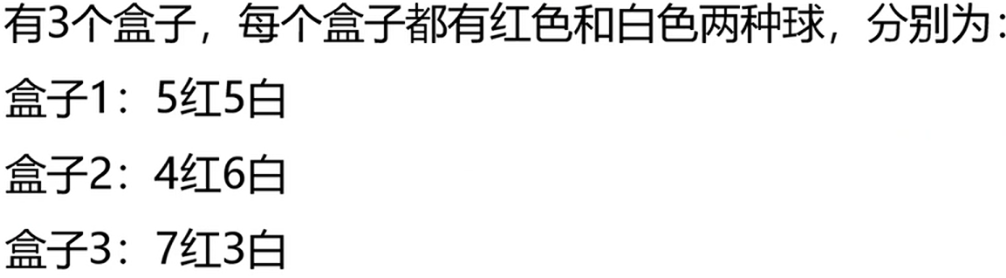
观测序列为{红 白 红}
在时刻1:
红色球,盒子1:

红色球,盒子2:

红色球,盒子3:

时刻2:
白色球,盒子1:

白色球,盒子2:

白色球,盒子3:

时刻3:
红色球,盒子1:

红色球,盒子2:

红色球,盒子3:

所以
2.4.2 给定观测序列O={o1,o2……oT} 求参数λ=(A,B,π)使得P(O|λ)最大
- 给定状态序列I={i1,i2……iT}
给定状态序列的话,模型参数十分好求
初始概率π直接查询状态序列就可以了
状态转移概率公式:
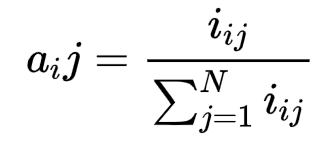
生成观测概率:

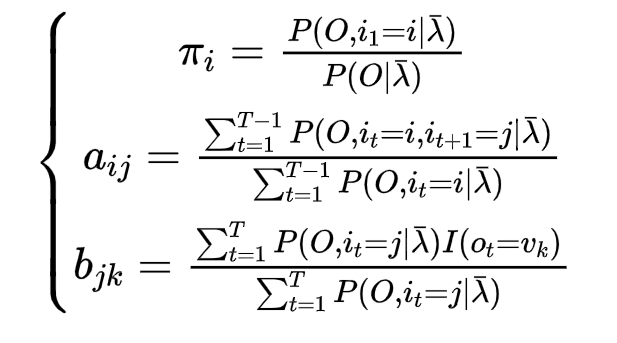
- 未给定状态序列
需要使用em算法
列概率最大值的对数似然方程

其中后部分

![]() 可视为一个常数
可视为一个常数
所以

其中三部分分别仅存在π、A、B参数,分别使用拉格朗日乘子法就可以求解
2.4.3 已知模型λ=(A,B,π)和观测序列O={o1,o2……oT} ,求状态序列I={i1,i2……iT}使得P(O|λ)最大
维特比算法
对于t时刻,隐藏状态为i,要找到所有可能路径的最大值

递推公式为

概率最大路径中t-1的状态为

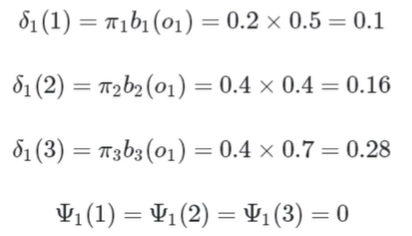
举例:
观测到序列为 {红 白 红}

t1时刻
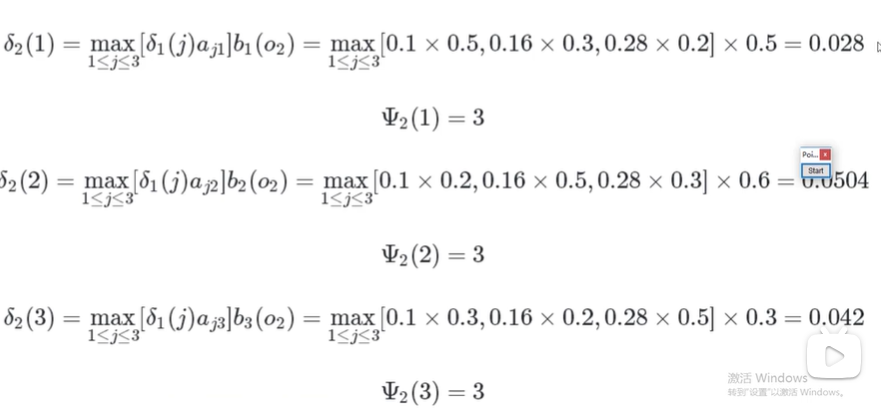
t2时刻
t3时刻
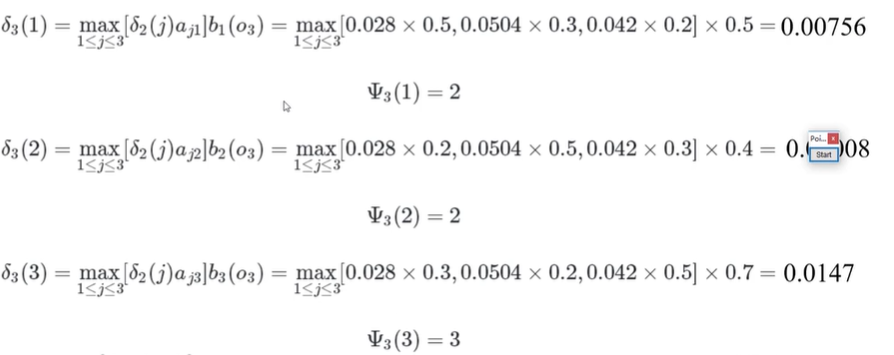
此时3最大,所以隐藏序列为(3,3,3)
三、hmmlearn工具安装
hmmlearn工具安装十分方便,执行
pip install hmmlearn
就可以了
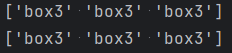
四、维特比算法求隐藏序列
# 隐藏状态:三个盒子 states = ['box1', 'box2', 'box3'] n_states = len(states) # 观测状态:两种球 observations = ['red', 'white'] n_observations = len(observations) # 模型参数 start_probability = np.array([0.2, 0.4, 0.4]) transition_probability = np.array([ [0.5, 0.2, 0.3], [0.3, 0.5, 0.2], [0.2, 0.3, 0.5] ]) emission_probability = np.array([ [0.5, 0.5], [0.4, 0.6], [0.7, 0.3] ]) # 用于离散观测状态的模型 model = hmm.CategoricalHMM(n_components=n_states) model.startprob_ = start_probability model.transmat_ = transition_probability model.emissionprob_ = emission_probability model.n_features = n_observations # 维特比算法,假设看到的是[红,白,红] seen = np.array([[0, 1, 0]]).T logprob, box = model.decode(seen, algorithm='viterbi') print(np.array(states)[box]) box2 = model.predict(seen) print(np.array(states)[box2])
五、求当前模型下的概率值(log形式)
# 求观测序列的可能性 print(model.score(seen))

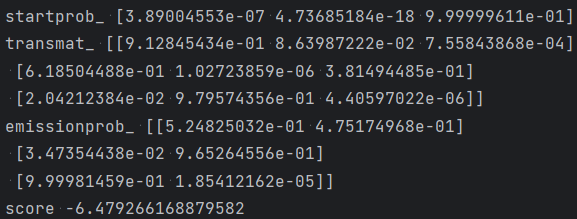
六、给定观测序列求模型参数使得概率最大
# em算法求模型参数 model2 = hmm.CategoricalHMM(n_components=n_states, n_iter=20, tol=0.01) X2 = np.array([[0, 1, 0, 1], [0, 0, 0, 1], [1, 0, 1, 1]]) model2.fit(X2) print('startprob_', model2.startprob_) print('transmat_', model2.transmat_) print('emissionprob_', model2.emissionprob_) print('score', model2.score(X2))
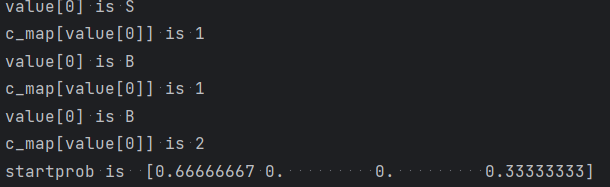
七、基于HMM算法的中文分词
将字视为观测状态,将词的位置信息视为隐藏状态,就可以实现分词啦
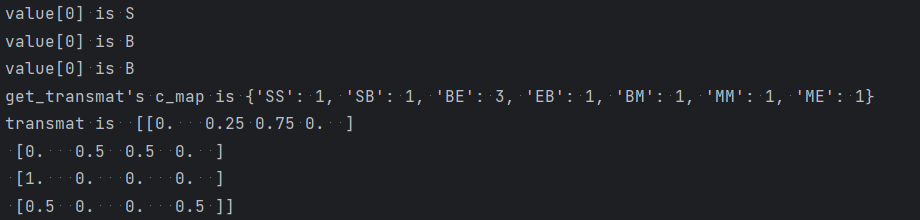
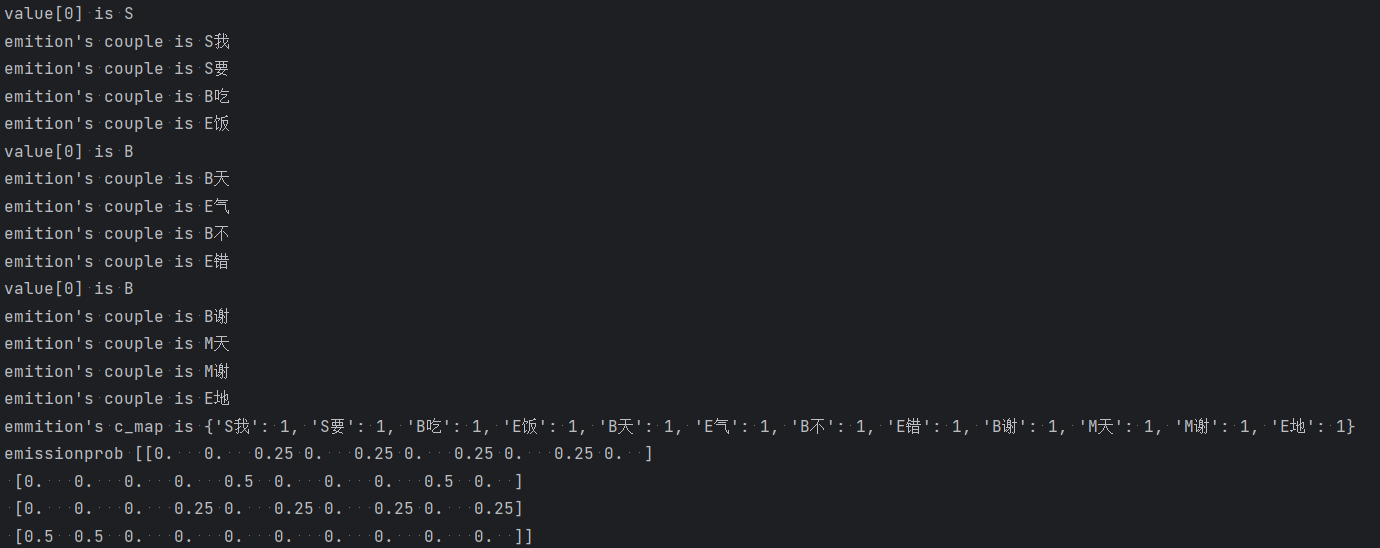
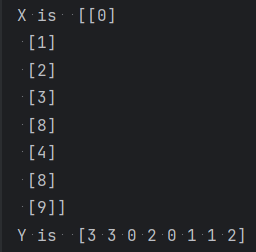
# 实现中文分词 # {B(词开头),M(词中),E(词尾),S(独字词)}{0,1,2,3} data = [{u'我要吃饭': 'SSBE'}, {u'天气不错': 'BEBE'}, {u'谢天谢地': 'BMME'}] def getwords(): res = [] for line in data: for key in line: for word in key: if word not in res: res.append(word) return ''.join(res) def get_startprob(data): """ 获取bmes起始矩阵 :return:起始矩阵 """ c = 0 c_map = {'B': 0, 'M': 0, 'E': 0, 'S': 0} for v in data: for key in v: value = v[key] c = c + 1 print('value[0] is ' + value[0]) c_map[value[0]] = c_map[value[0]] + 1 print('c_map[value[0]] is ' + str(c_map[value[0]])) res = [] for i in 'BMES': res.append(c_map[i] / float(c)) return res def get_transmat(data): """ 获取状态转移矩阵 :return:状态转移矩阵 """ c = 0 c_map = {} for v in data: for key in v: value = v[key] print('value[0] is ' + value[0]) for v_i in range(len(value) - 1): couple = value[v_i:v_i + 2] c_couple_source = c_map.get(couple, 0) c_map[couple] = c_couple_source + 1 c = c + 1 print('get_transmat\'s c_map is ' + str(c_map)) res = [] for i in 'BMES': col = [] col_count = 0 for j in 'BMES': col_count = c_map.get(i + j, 0) + col_count for j in 'BMES': col.append(c_map.get(i + j, 0) / float(col_count)) res.append(col) return res def get_emissionprob(data): """ 获取现象转换矩阵 :return:现象转换矩阵 """ c_map = {} for v in data: for key in v: k = key value = v[key] print('value[0] is ' + value[0]) for v_i in range(len(value)): couple = value[v_i] + k[v_i] print('emition\'s couple is ' + couple) c_couple_source = c_map.get(couple, 0) c_map[couple] = c_couple_source + 1 res = [] print('emmition\'s c_map is ' + str(c_map)) words = getwords() for i in 'BMES': col = [] col_count = 0 for j in words: col_count = c_map.get(i + j, 0) + col_count for j in words: col.append(c_map.get(i + j, 0) / float(col_count)) res.append(col) return res def get_array_from_phase(data, phase): c_map = {} c = 0 for line in data: for key in line: for word in key: if word not in c_map.keys(): c_map[word] = c c = c + 1 res = [] for word in phase: res.append(c_map[word]) return res startprob = np.array(get_startprob(data)) print('startprob is ', startprob) transmat = np.array(get_transmat(data)) print('transmat is ', transmat) emissionprob = np.array((get_emissionprob(data))) print('emissionprob', emissionprob) cate_hmm = hmm.CategoricalHMM(n_components=4) cate_hmm.startprob_ = startprob cate_hmm.transmat_ = transmat cate_hmm.emissionprob_ = emissionprob phase = u'我要吃饭谢天谢地' X = np.array(get_array_from_phase(data, phase)) X = X.reshape(len(phase), 1) print('X is ', X) Y = cate_hmm.predict(X) print('Y is ', Y)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号