
CAN通信(一) :通信过程
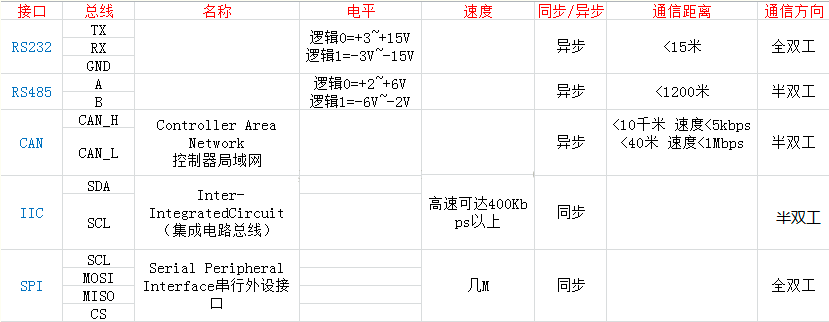
一、CAN通讯并不是以时钟信号来进行同步的,它是一种异步半双工通讯。(同步即在同一个时钟驱动下数据通信,半双工即接受与发送不能同时进行)
二、CAN的组成方式
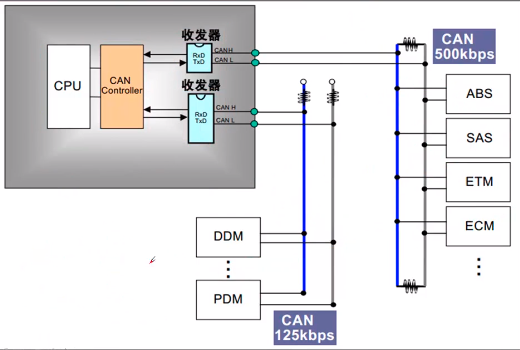
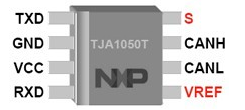
CAN的组成一般有两种方式:一种是CPU与CAN控制器集成到一起、再外接CAN收发器;另一种是CPU与CAN控制器分开的,使用的时候需要配置CAN接口电路,比较麻烦。STM32中就是采用第一种方式,将CAN接口集成在芯片内,使用的时候再外接CAN收发器(顾名思义,可发送,可接收),常用的有TJA1050或者82C250。
三、CAN的闭环网络
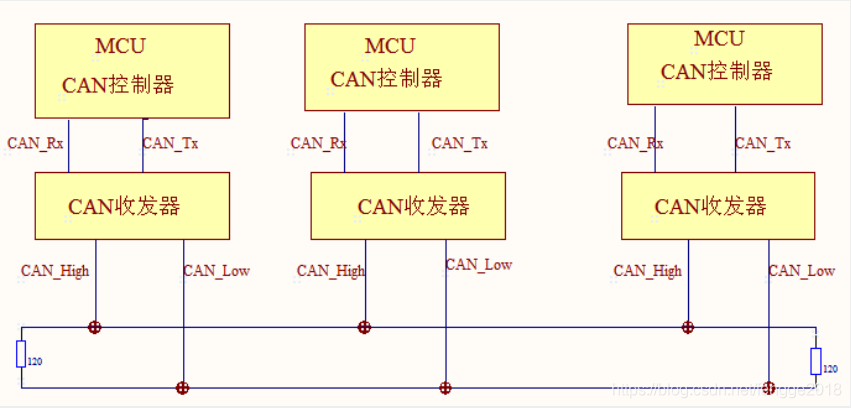
以ISO11898 标准的高速、短距离闭环网络为例,总线最大长度为 40m,通信速度最高为 1Mbps。在 CAN 总线的起止端有一个 120Ω的终端电阻,是用来来做阻抗匹配,以减少回波反射。
3.1 数据传输原理
先知道CAN通信只由两根线完成的,一条称为CAN_H(CAN High),一条称为CAN_L(CAN Low),共同构成一组差分信号线。整个过程是以差分信号的形式进行通讯的,即信号的逻辑 0 和逻辑 1 由两根差分信号线的电压差来表示。
CAN_Rx和CAN_Tx分别是从MCU中接出来的引脚,比如MCU要发送一个逻辑1,则只要将CAN_Tx设置为1,经过CAN收发器转换,CAN_High和CAN_Low 线上的电压均为 2.5v,即传到总线的电压差 Vh-Vl=0V,总线上的状态则就是逻辑1。同样,当CAN_High和CAN_Low 读取到 CAN总线电压分别3.5V和1.5V,即压差为2V,经过收发器转换,MCU则可通过CAN_Rx读取到信号0
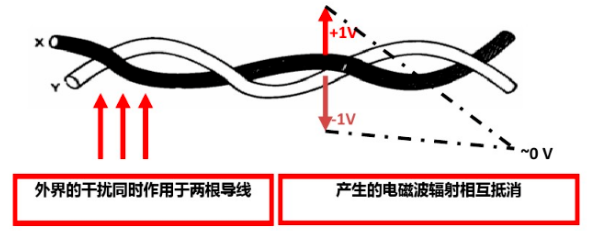
可以想象到以差分信号形式传送,稳定性更好,因为即使环境问题导致CAN_High电压发送变化,则CAN_L也会发送同等变化,两者做差即可抵消由于这个环境引起的变化。
- 发送方通过使总线电平发生变化,将其信息传递到CAN总线上。
- 接收方通过监听总线电平,将总线上的消息读入自己的接收器。
3.2 通信的整个过程
CAN中并无地址的概念,少了像IIC中的SCL地址线、SPI中的片选信号线,简洁的物理层决定了 CAN 必然要配上一套更复杂的协议。如何用一个信号通道实现同样、甚至更强大的功能呢?答案是对数据或操作命令进行打包。
3.2.1 空闲状态
先规定空闲状态,所谓的空闲状态就是指没有节点正在传输数据的时候,在CAN协议中,当总线上的上出现连续的11位隐性电平,那么总线就处于空闲状态。也就是说对于任意一个节点而言,只要它监听到总线上连续出现了11位隐性电平,那么该节点就会认为总线当前处于空闲状态。
显/隐性电平: 在总线上通常逻辑1表示隐性。而0表示显性。总线上的逻辑0即差分电压差为2V左右(CAN_H=3.5,CAN_L=1.5),
总线上的逻辑1即差分电压差为0V(CAN_H=2,CAN_L=2)
3.2.2 开始数据传输
每次发送数据前,节点都会监听总线的状态,如果总线状态为空闲时,它就会立即向总线上发送自己的数据,这个数据里不仅有数据,还有本身的ID信息或者其他的控制指令,应称为数据包(数据帧),也叫做报文。当报文被传输到其它节点时,只要这些节点按格式去解读,就能还原出原始数据。
报文: 在原始数据段的前面加上传输起始标签、片选(识别)标签、控制标签,在数据的尾段加上 CRC 校验标签、应答标签和传输结束标签。
类似这样的数据包就被称为 CAN 的数据帧。为了更有效地控制通讯,CAN 一共规定了 5 种类型的帧,帧也称为报文。
数据帧是在 CAN 通讯中最主要、最复杂的报文,它以一个显性位(逻辑 0)开始,以 7 个连续的隐性位(逻辑 1)结束。在它们之间,分为仲裁段、控制段、数据段、CRC 段和 ACK 段,以标准数据帧为例。
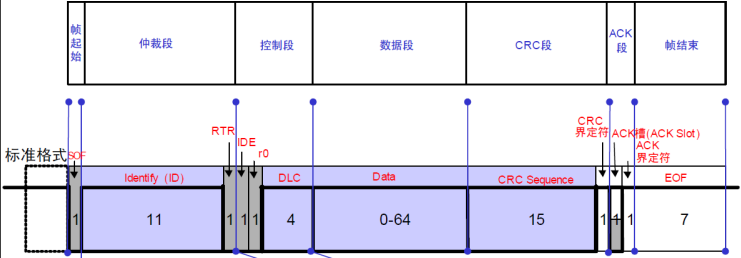
数据帧标准格式各个位的介绍
SOF:联系前文可知,当数据帧发出第一位时(0为显性电位),总线就由空闲状态转为传输状态,同一时间只能允许一个节点传输数据。
Identify:接下来的仲裁段有11位,即本数据帧的 ID 信息,决定着数据帧发送的优先级,也决定着其它设备是否会接收这个数据帧,禁止高 7 位都为隐性(禁止设定:ID=1111111XXXX), ID 信息的作用:① 如果同时有多个节点发送数据时,作为优先级依据(仲裁机制);② 目标节点通过 ID 信息来接受数据(验收滤波技术)。这些将在下文提出。
RTR:(Remote Transmission Request BIT) 位用于标识是否是远程帧(0,数据帧;1,远程帧),在数据帧里这一位为显性(逻辑 0)。
IDE:(Identifier Extension Bit),是用于区分标准格式与扩展格式,在标准格式中 IDE 位为显性,在扩展格式里 IDE 位为隐性。
r0:保留位,必须以显性电平发送。
DLC:由 4 位组成,MSB 先行(高位先行),它的二进制编码用于表示本报文中的数据段含有多少个字节,DLC 段表示的数字为0到8,若接收方接收到 9~15 的时候并不认为是错误。
Data:数据帧的核心内容,它由 0~8 个字节(0 ~ 64位)组成,MSB 先行。
CRC:该段用于检查帧传输错误,发送方以一定的方法计算包括:帧起始、仲裁段、控制段、数据段;接收方以同样的算法计算 CRC 值并进行比较,如果不同则会向发送端反馈出错信息,重新发送;计算和出错处理一般由 CAN 控制器硬件完成或由软件控制最大重发数。该段由 15 个位的 CRC 顺序和 1 个位的 CRC 界定符(用于分隔的位)组成,它为隐性位,主要作用是把CRC 校验码与后面的 ACK 段间隔起来。
ACK:由 ACK 槽(ACK Slot)和 ACK 界定符 2 个位组成,在 ACK 槽位中,发送端发送的为隐性位,而接收端则在这一位中发送显性位以示应答。在 ACK 槽和帧结束之间由 ACK 界定符间隔开,为隐性位。(发送 ACK/返回 ACK这个过程使用到回读机制,即发送方先在 ACK 槽发送隐性位后,回读到的总线上的电平为显性0,发送方才知道它发送成功了,不用重发)
EOF:由发送端发送 7 个隐性位表示结束。
比如总线上有3个节点,节点1设置ID为000101 00010,节点2验收滤波ID表中有节点1的ID号,而节点3中的验收滤波ID表中没有节点1的ID号,节点1向节点2发送1字节的信息。
报文信息:0 000101 00010 0 0 0 0 0001 0101 1000 XXXXXXXXXXXXXXX 1 1 1 1111111
通过总线发送时,在ID信息发送阶段,只有节点2才能收到总线上的数据,因为节点3的验收滤波ID表中没有节点1的ID号
在报文发送到ACK槽时,会等待并回读节点2的反馈,从节点2的角度看,此时总线为空闲状态,当验证CRC正确,则向总线发送显性电平,接着当节点1回读到显性电平,才会继续发送剩下的EOF
以上只是简单的理解,实际传输的过程比这个复杂许多,下文继续。
3.2.3 仲裁机制
运用到线与机制和回读机制
以上只是节点1主动发送数据,但是万一节点1和节点2同时向节点3发送数据的时候,如何判定先后呢?采用非破坏性位仲裁机制,即对各个消息的标识符(即ID号)进行逐位仲裁(比较),如果某个节点发送的消息仲裁获胜,那么这个节点将获取总线的发送权,仲裁失败的节点则立即停止发送并转变为监听(接收)状态。
从上文可知,显性的优先级高于隐性,即仲裁比较的就是哪个ID中的0多,0最多的那个就可以获得发送权,比如 000000 00010 就比 000000 00011 的优先级要高,仲裁的过程由硬件实现;同时要注意,仲裁段除了报文 ID 外,还有 RTR、IDE、SRR 位(在拓展模式中,下文价绍),也就是说当ID全都一样时,会继续比较接下来的几位。
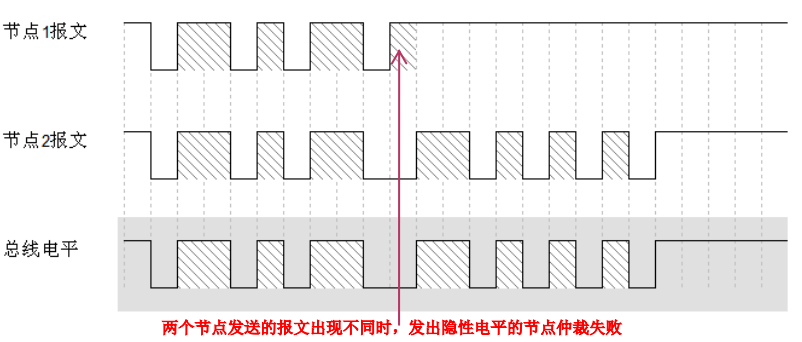
至于如何做到“0多即胜”,可以理解为一种回读和线与机制,即显性能够将隐性覆盖,将自己要比较的位与总线上的状态相与,只有线与的结果与本身一致时,仲裁才能够通过。
其实在报文发送上去的过程,采用的是广播的方式,在节点1和节点2总裁的同时,总线上所有的节点都能够监听到它们的ID号,只不过也在同时进行验收滤波,只有监听到的ID号存在ID表中,该节点才会选择继续监听后面的报文。
3.2.4 位时序
以上已经基本解决了CAN通信的基本问题,可以思考一下,由于 CAN 没有时钟信号线,而且它的报文中并没有包含用于同步的标志,要怎么做才能对总线的电平进行正确的采样呢?比如我节点1发送3个位出去了,节点2应该在什么时候接收才能保证此时此刻它所接收到的就是第3位或者接收到的电平是正确的? CAN中提出了位同步的方式来确保通讯时序。
位时序的主要知识点
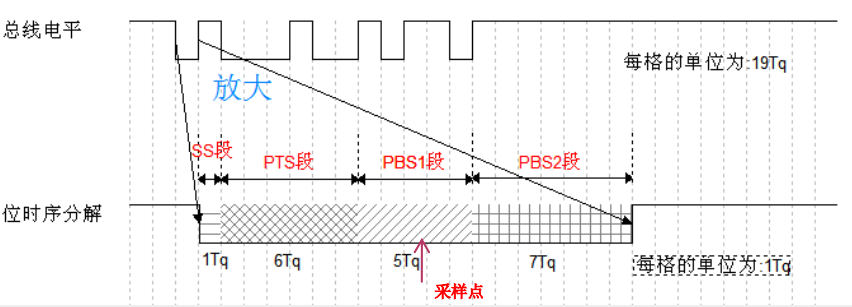
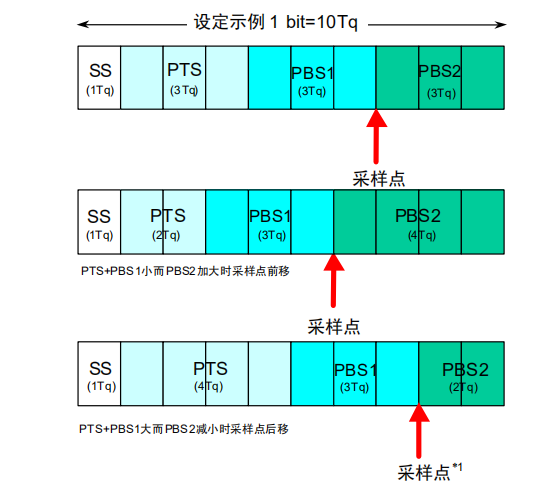
CAN总线通讯协议的每一个数据帧可以看作一连串的电平信号,每一个电平信号代表一位(一个字节8位的位),所以一帧中包含了很多个位,由发送单元在非同步的情况下发送的每秒钟的位数称为位速率。 一位又分为4段, 同步段(SS)、传播时间段(PTS)、相位缓冲段 1(PBS1)、相位缓冲段 2(PBS2)。分解后最小的时间单位是 Tq,而一个完整的位由 8~25 个 Tq 组成。
- 1 位分为 4 个段,每个段又由若干个 Tq 构成,这称为位时序。
- 1 位由多少个 Tq 构成、每个段又由多少个 Tq 构成等,可以任意设定位时序。通过设定位时序,多个单元可同时采样,也可任意设定采样点。
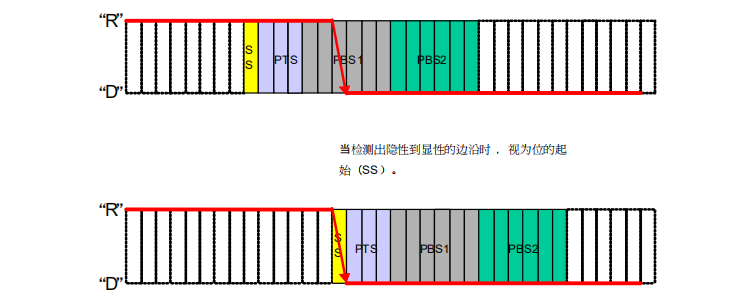
SS 段(SYNC SEG):同步段,比如当总线上出现帧起始信号(SOF)时,其它节点上的控制器根据总线上的这个下降沿,对自己的位时序进行调整,把该下降沿包含到 SS 段内,这样根据起始帧来进行同步的方式称为硬同步。其中 SS 段的大小为 1Tq。总线上信号的跳变沿被包含在节点的 SS 段的范围之内,则表示节点与总线的时序是同步的,采样点采集到的总线电平即可被确定为该位的电平。
PTS 段(PROP SEG):传播时间段,这个时间段是用于补偿网络的物理延时时间,包括发送单元的输出延迟、总线上信号的传播延迟、接收单元的输入延迟,这个段的时间为以上各延迟时间的和的两倍。大小可以为 1~8Tq。
PBS1 段(PHASE SEG1):相位缓冲段,主要用来补偿边沿阶段的误差,它的时间长度在重新同步的时候可以加长。 PBS1 段的初始大小可以为 1~8Tq。
PBS2 段(PHASE SEG2):另一个相位缓冲段,也是用来补偿边沿阶段误差的,它的时间长度在重新同步时可以缩短。 PBS2 段的初始大小可以为 2~8Tq。
(对于PBS段而言,当信号边沿不能被包含于 SS 段中时,可在此段进行补偿,以及可以吸收时钟误差)
SJW (reSynchronization Jump Width):重新同步补偿宽度,即在重新同步的时候,PBS1 和 PBS2 段的允许加长或缩短的时间长度,SJW 加大后允许误差加大,但通信速度下降。SJW 为补偿此误差的最大值(即每一次误差补偿都不能超过这个值,1~4Tq)。
CAN 的同步分为硬同步和重新同步:
硬同步:在帧起始信号时同步总线上所有器件的位时序,无法确保后续一连串的位时序都是同步的。
重新同步:在检测到总线上的时序与节点使用的时序有相位差时(即总线上的跳变沿不在节点时序的 SS 段范围),通过延长 PBS1 段或缩短 PBS2 段,来获得同步。
采样点: 读取总线电平的时刻,并将读到的电平作为位值的点。位置在 PBS1 结束处。
延长/缩短PBS段来达到同步: PTS+PBS1小而PBS2加大时采样点前移,PTS+PBS1大而PBS2减小时采样点后移。
同步过程:
在硬同步阶段,当节点检测到本身SS段并不在总线电平下降沿跳变处,节点则会把自己的位时序中的 SS 段平移至总线出现下降沿的部分,后面三段也跟着上去,以获得同步。(可以理解为节点在检测到帧起始信号时才开始“设置段”)
在重新同步阶段,利用普通数据位的高至低电平的跳变沿来同步(帧起始信号是特殊的跳变沿)。重新同步与硬同步方式相似的地方是它们都使用 SS 段来进行检测,同步的目的都是使节点内的 SS 段把跳变沿包含起来。重新同步的方式分为超前和滞后两种情况,以总线跳变沿与 SS 段的相对位置进行区分,下面举例设SJW为2Tq。
① 相位超前,节点从总线的边沿跳变中,检测到它内部的时序比总线的时序相对超前 2Tq,这时控制器在下一个位时序中的 PBS1 段增加 2Tq 的时间长度,使得节点与总线时序重新同步。

② 相位相位滞后,节点从总线的边沿跳变中,检测到它的时序比总线的时序相对滞后 2Tq,这时控制器在前一个位时序中的 PBS2 段减少 2Tq 的时间长度,获得同步。
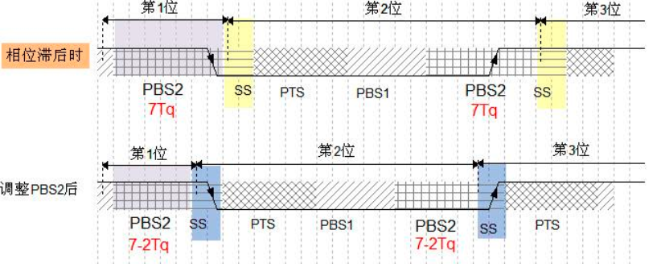
理解上面重新同步过程时,需要知道前一次SS到下一次SS之间的长度是可伸展的(暂时称之为 L ),当检测到前一次SS出现得太快(还没等到下降沿到来),这就是相位超前了,如果不把 L 缩短一点,那么下一次SS将也会超前。缩短 L 的方法就是调整 PBS 的长度,这个过程由CAN控制器完成,即(新的PBS长度 = 当前 PBS长度-SJW)。
