
线性动力学变分原理基础 Part1
线性动力学变分原理基础 Part1 《计算动力学》 张雄[著] 笔记
线弹性动力学的控制方程(位移法,要得到的是位移分量的表达式$u=u(x,y,z,t),v=v(x,y,z,t),w=w(x,y,z,t)$)
运动方程
$\sigma _{ij,j}+\bar{f_i}=\rho \ddot u_i$
应变-位移关系
$\epsilon_{ij}=\frac{1}{2} (u_{i,j}+u_{j,i})$
应力-应变关系
$\sigma _{ij}=D_{ijkl}\epsilon_{kl}$
边界条件
$\sigma _{ij}n_j=\bar{T_i}$
$u_i=\bar{u_i}$
初始条件
$u_i | _{t=0}=\bar{u}_i^0$
$\dot{u}_i | _{t=0}=\dot{\bar{u}}_i^0$
精确解:在域内任一点任一时刻满足运动方程,在力边界上任一点任一时刻满足力边界条件,(位移法,位移边界条件自动满足)
近似解:加权余量法
加权余量法
近似解不能精确满足运动方程和力边界条件,存在余量$R_i(x,y,z,t),\bar{R_i}(x,y,z,t)$
$R_i=\sigma _{ij,j}+\bar{f_i}-\rho \ddot u_i \not=0$
$\bar{R_i}=\sigma _{ij}n_j-\bar{T_i} \not=0$
加权余量法(WRM)允许运动方程和边界条件在各点存在余量,但要求这些余量在域内和边界上的加权(对权函数)积分等于零
余量方程:
$\int_V R_i v_i dV=0$
$\int_{S_\sigma} \bar{R_i} \bar{v_i} dS=0$
$v_i$和$\bar{v_i}$分别是定义在域内和边界上的权函数(test function),权函数是任何相互独立的完备函数集
余量方程表示$R_i$与$v_i$正交,$\bar{R_i}$与$\bar{v_i}$正交
若余量方程对任意权函数都成立,即$R_i$与任意$v_i$正交,因为$v_i$是完备函数集,所以$R_i$与任意函数正交,则由変分学基本引理知$R_i$恒等于零,即运动方程在域内任一点任一时刻都满足,同理,边界条件在边界上任一点任一时刻都满足
(所以WRM在理论上,当试函数取得越多时,解越接近精确解,是收敛的)
由上述讨论,我们可以称余量方程为运动方程和边界条件的等效积分形式
到此,要具体实施WRM还不够,还有一个操作,把近似解取为一族已知函数(称为试探函数)的线性组合,这样就把偏微分方程变成了关于试探函数的系数的代数方程
$u_i=\sum_{i=1}^N \phi _i a_i$
$a_i$是待定参数,由余量方程确定,$\phi _i$是已知的试探函数(trial function),试探函数取自线性独立的完全的函数序列 ,试探函数的选取还需满足位移边界条件
WRM的实施是通过选择合适的待定参数强迫余量在某种平均意义下为零
选择不同的权函数就得到不同的WRM,下面假设力边界条件是满足的,只考虑域内余量
1. 配点法
权函数取Dirac函数$W_i= \delta (x-x_i),i=1,2,...,N$
代入余量方程,根据Dirac函数的性质得
$R_i(x_j)=0, i=1,2,3;,j=1,2,...,N$
这种方法相当于简单地强迫余量在域内的N个离散点(配点)上为零
2. 子域法
3. 最小二乘法
4. 伽辽金法
伽辽金法的权函数与试探函数相同,即
$W_i=\phi _i$
相应的余量方程:
$\int_V R_i \phi _j dV=0, i=1,2,3;j=1,2,...N$
在许多情况下,伽辽金法得到的求解方程的系数矩阵是对称的,所以在用WRM建立有限元格式时主要用伽辽金法
当存在相应泛函时,伽辽金法与变分法往往给出同样的结果
例子:
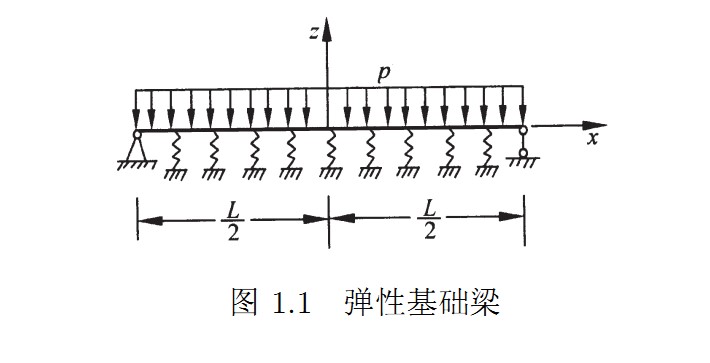
控制方程和边界条件:
$EI\frac{d^4w^*}{dx^{*4}}+kw^*+p=0$
$w^*(L/2)=0$
$w^*(-L/2)=0$
无量纲化
$x=\frac{x^*}{L/2},w=\frac{w^*}{pL^4/EI},\alpha =\frac{k^*L^4}{16EI}$

