

Bi-VAEGAN:对TF-VAEGAN提出的视觉到语义进一步改进
论文“Bi-directional Distribution Alignment for Transductive Zero-Shot Learning”提出Bi-VAEGAN,它以f-VAEGAN-D2为Baseline,进一步发展了TF-VAEGAN通过利用所见数据和反馈模块增强生成的视觉特征思路。f-VAEGAN-D2的介绍、TF-VAEGAN的介绍
引言
取决于标签是否可用,可以分为无条件分布\(p(v)\)或条件分布\(p(v|y)\)。当以辅助信息为条件时,可以学习辅助数据的联合分布。这种分布可以连接视觉空间与辅助知识,并引入生成器作为知识迁移的工具。通过适当的监督如条件鉴别器判断生成的图像是否是真实的野猫,将类内数据分布与真实数据分布保持一致。TZSL的难题在于转移可见类的分布,对未见类分布建模,实现未见类的真实生成。
实现这一问题的代表方法是f-VAEGAN:它使用了无条件判别器增强了未见类的生成,并学习未见类的数据分布。大多数现有工作在前向生成过程中使用辅助数据输出图像,即\(p(v|y)\)。这种使用条件的弱引导生成对辅助信息质量十分敏感。
为了实现视觉和辅助数据更好对其,增强与未见类的条件分布对齐,作者提出了一种新颖的双向生成过程。它将前向生成过程与后向生成过程结合起来,即通过 \(p(y|x)\) 从图像生成辅助数据。作者的工作基于f-VAEGAN,总体的改进包括:
- 添加转导回归器以形成反向生成,以图像视觉特征为条件,生成伪辅助特征。这与 f-VAEGAN 中使用的前向生成一起,提供了更多约束来学习未见类的条件分布,实现视觉和辅助空间的更好对齐。
- 引入L2特征归一化的数据预处理,帮助条件对齐。
- 作者注意,未见类的先验分布对于分布对齐十分重要,尤其是不平衡数据集,先验的选择不当容易导致对齐不良。为了解决这个问题,作者提出了一种简单有效的类先验估计方法,该方法基于未见类别示例中包含的聚类结构。
方法
问题定义
使用\(V^s=\{{\bm v}_i^s\}^{n_s}_{i=1}\)和\(V^u=\{{\bm v}_i^u\}^{n_u}_{i=1}\)表示可见类与不可见类的示例,表示由预训练的网络提取的视觉特征。每一个可见类的label表示为:\(Y^s=\{y_i\}^{n_s}_{i=1}\)。以属性作为辅助信息,描述可见类和不可见类,用向量集表示:\(A^s=\{{\bm a}^s_i\}^{N_s}_{i=1}\)和\(A^u=\{{\bm a}^u_i\}^{N_u}_{i=1}\)。\(N_s\)和\(N_u\)分别表示可见类和未见类的类的数量。
在TZSL设置下,训练分类器\(f({\bm v}):\mathcal{V}^u\rightarrow\mathcal{Y}^u\)对未见类的数据进行推理,\(\mathcal{V}\)表示视觉特征空间,\(\mathcal{Y}\)表示标签空间。
整体训练的信息表示为:\(D^{tr}=\{\langle V^s,Y^s\rangle,\{A^s,A^u\},V^u,\}\),这里\(\langle\cdot,\cdot\rangle\)表示配对数据。
L2特征归一化
特征归一化可以帮助模型训练收敛,一般的TZSL采用Min-Max 归一化\({\bm v}'=\frac{{\bm v}-\min({\bm v})}{\max({\bm v})-\min({\bm v})}\)。然而作者提出了L2归一化的trick认为更有利,对于视觉特征向量\({\bm v}\in V^s\cup V^u\):
其中超参数\(r>0\)为控制规划特征向量的范数。利用L2归一化层替换了生成器中伴随Min-Max方法的最后一个sigmoid层。作者在文中记录了L2与Min-Max归一化的曲线,L2归一化在早期训练中具有更高的精度和更快的收敛速度,比Min-Max表现更好。通过对比r大小设置,发现较小的r可能会导致性能更稳定,而较大的r会导致梯度增加,从而可能导致训练不稳定。
双向对齐模型
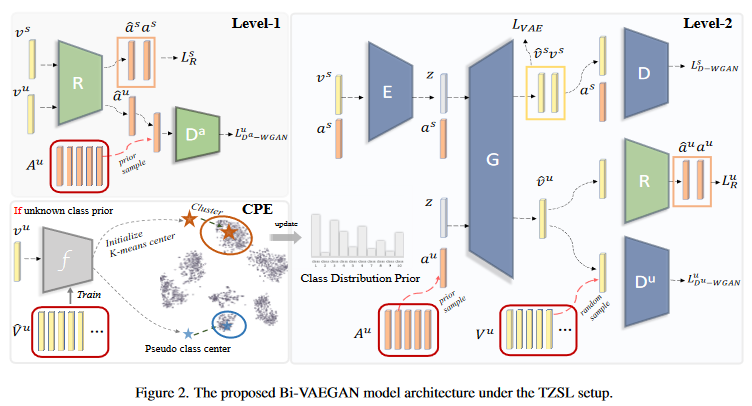
模型共有六个组成部分:
- 条件VAE编码器:\({\bm E}:\mathcal{V}\times\mathcal{A}\rightarrow\mathbb{R}^k\),在类别属性的条件下,将视觉特征映射到k维隐藏向量。
- 条件视觉生成器:\({\bm G}:\mathcal{A}\times\mathbb{R}^k\rightarrow\mathcal{V}\),在类别属性的条件下,从正态分布\(\mathcal{N}(0,1)\)中采样k维随机向量合成视觉特征。
- 来自WGAN的条件视觉判别器:\(D:\mathcal{V}^s\times\mathcal{A}\rightarrow\mathbb{R}\),处理可见类。
- 来自WGAN的视觉判别器:\(D^u:\mathcal{V}^u\rightarrow\mathbb{R}\),处理未见类。
- 回归器:\({\bm R}:\mathcal{V}\rightarrow\mathcal{A}\),将视觉空间映射到属性空间。
- 来自WGAN的属性判别器:\(D^a:\mathcal{A}\rightarrow\mathbb{R}\)。
工作流分为两个Level:
- 在Level1,回归器\({\bm R}\)使用判别器\(D^a\)进行对抗训练,让视觉特征转换而来的伪属性与真实属性对齐。
- 在Level2,使用两个判别器\(D\)和\(D^u\)对抗训练视觉生成器\({\bm G}\),让生成的视觉特征与真实的视觉特征对齐。
此外,G的训练取决于R。这鼓励用于合成视觉特征的伪属性要更好地与真实属性对齐。“双向对齐”正是得名于:在视觉和属性空间中对齐真伪数据。
Level 1:回归器R训练
回归器\({\bm R}\)的训练具有转导性和对抗性。
- 对于可见类执行监督学习,实现视觉特征到属性特征的映射。
- 对于未见类的视觉特征和类属性进行无监督学习来增强(这里未见类的示例与特征是不配对的),学习未见类的整体特征分布。
\({\bm R}\)的学习通过最小化视觉特征的映射与其相应属性。
对于未见类,通过区分未见类的真实特征的真实属性\({\bm a}^u\)和真实特征计算的伪属性\(\hat{\bm a}^u\),通过对抗学习实现。
其中\(\hat{\bm a}^u={\bm R}({\bm v}^u),\ {\bm a}^u\sim p^u_{\bm G}(y),\ \overline{\bm a}^u\sim \mathcal{P}_t({\bm a}^u,\hat{\bm a}^u)\),未见类的先验分布以\(p^u_{\bm G}(y)\)表示,计算将在下文提到。原始属性从该先验分布采样的过程作者称为:先验采样过程。前两项计算了真实分布与模型分布的Earth-mover距离,等式的第三项为梯度惩罚,它实现了WGAN中的Lipschitz限制。
\(\mathcal{P}_t({\bm a},{\bm b})\)是L2超球面的插值分布。从该分布的采样计算为:\({\bm c}=L_2(t{\bm a}+(1-t){\bm b},r),\ t\sim\mathcal{U}(0,1),\ \lVert {\bm a}\rVert_2=\lVert {\bm b}\rVert_2=r\)
训练目标可定义为:
其中\(\lambda\)为超参数。这使得知识分布在属性空间,未见类向可见类转移。然而特征的可辨别性受枢纽化问题的限制。但是也可以利用这一点,为后续,在视觉空间中进行分布对齐提供近似监督。
枢纽化问题(Hubness)是指在高维空间中,一些样本点成为了其他样本点的近邻枢纽,即在数据集中,存在一些数据点它们与大多数其他数据点具有更近的距离。
Level 2:生成器G和编码器E训练
回归器\({\bm G}\)的训练也具有转导性和对抗性,目的是对齐合成特征与真实特征。在属性空间上冻结\({\bm R}\),视觉空间上使用判别器\(D\)和\(D^u(\hat{\bm v}^u)\)。
两个判别器需要经过训练,以区分真实的视觉特征和条件生成器计算的合成视觉特征。设\(\hat{\bm v}\sim G(\boldsymbol{a},\boldsymbol{z})\),其中\({\boldsymbol{z}\sim\mathcal{N}}(\boldsymbol{0},\boldsymbol{1}), \ \boldsymbol{a}\sim{p_{\boldsymbol{G}}}(y)\)。对于可见类的先验分布定义为\(p_{\boldsymbol{G}}^{s}(y)\),该分布可以根据每个类的样本数简单估计得到。未见类的先验分布还是\(p_{\bm G}^u(y)\)。生成的视觉特征\(\hat{\bm v}\)已经通过G进行L2归一化。
- 对于可见。判别器以类属性为条件,即\(D(\hat{\bm v},{\bm a}^s)\)。
- 对于未见类判别器是无条件的,即\(D^u\)。
这里,\(\bar{\bm v}^s,\ \bar{\bm v}^u\)由插值分布中采样得到(参见上文)。这里\(\hat{\bm v}^u\)由从\({\bm a}^u\sim p^u_{\bm G}(y)\)采样的未见类属性计算得到。公式(5)、(6)弱对齐了未见类条件分布,但缺少监督。为了提高对齐健壮性,引入了另一个训练损失:
这里使用Level 1训练的R来执行监督约束。这可以防止模型坍塌,并作为GAN训练的补充。相似的,还对VAE进行训练,以增强可见类的对抗训练:
第一项为KL散度,第二项使用L2归一化特征重建均方差(Mean-squared-error, MSE)。最后,总的训练目标为:
这里,\(\alpha,\ \beta,\ \gamma\)为超参数。训练包括了已知类的成对的视觉特征和未见类的估计类分布,通过R进行监督增强,以进一步约束未见类的视觉特征生成。
提出的Bi-VAEGAN可通过移除\(V^u\),以适应归纳ZSL:
未见类先验估计
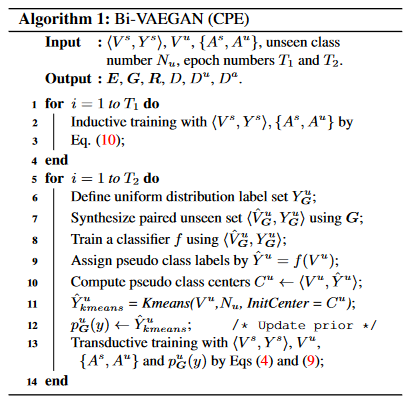
公式(3)(6)中提到,未见类属性采样\({\bm a}^u\sim p_{{\bm G}}^u(y)\)。由于没有标签信息,无法从真实的类先验中采样\(p^u(y)\)。作者发现,由于骨干网络,未见类的样本在视觉空间中具有直观的集群结构。作者采用K-means聚类,重点设计聚类中心的初始化。估计的先验分布\(p_{{\bm G}}^u(y)\)迭代更新,并在每个epoch,根据额外的分类器\(f\)计算的伪类中心重新初始化。对于第一次初始化,使用归纳训练的生成器来转移可见类的配对知识,以便对未见类更好估计。这种估计称为聚类先验估计(the cluster prior estimation, CPR),实现过程如1-12行所示(给它翻译了下):
模型预测和特征增强
完成6个模块的训练后,将训练未见类的样本分类模型\(f:\mathcal{V}^{u}(\mathrm{~or~}\hat{\mathcal{V}}^u)\times\mathcal{H}^u\times\hat{\mathcal{A}}^u\to\mathcal{Y}^{u}\)。使用的特征向量\({\bm x}^u=[{\bm v}^u,{\bm h}^u, \hat{\bm a}^u]\)由三部分组成:\({\bm v}^u ({\rm or}\ \hat{\bm v}^u)\)表示视觉特征,\(\hat{{\bm a}}^{u}=\boldsymbol{R}\left({\bm v}^{u}\right)\)表示回归器计算的伪属性,\({\bm h}^u\)由回归器第一个全连接层返回。它集成了生成器和回归器的知识,具有更强的区分性。
参考文献
- Wang, Zhicai, et al. "Bi-directional Distribution Alignment for Transductive Zero-Shot Learning." Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2023.

