ROC,AUC,PR,AP介绍及python绘制
这里介绍一下如题所述的四个概念以及相应的使用python绘制曲线:
参考博客:http://kubicode.me/2016/09/19/Machine%20Learning/AUC-Calculation-by-Python/?utm_source=tuicool&utm_medium=referral
一般我们在评判一个分类模型的好坏时,一般使用MAP值来衡量,MAP越接近1,模型效果越好;


更详细的可参考:http://www.cnblogs.com/pinard/p/5993450.html
准确率pr就是找得对,召回率rc就是找得全。
大概就是你问问一个模型,这堆东西是不是某个类的时候,准确率就是 它说是,这东西就确实是的概率吧,召回率就是, 它说是,但它漏说了(1-召回率)这么多。
(这里的P=FN+TP;N=TN+FP;而这里recall=tp rate;上述链接里的特异性其实就是fp rate)
AUC和AP分别是ROC和PR曲线下面积,map就是每个类的ap的平均值;python代码(IDE是jupyter notebook):
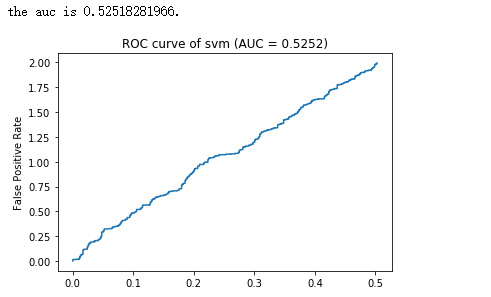
#绘制二分类ROC曲线 import pylab as pl %matplotlib inline from math import log,exp,sqrt evaluate_result = "D:/python_sth/1.txt" db = [] pos , neg = 0 , 0 with open(evaluate_result , 'r') as fs: for line in fs: nonclk , clk , score = line.strip().split('\t') nonclk = int(nonclk) clk = int(clk) score = float(score) db.append([score , nonclk , clk]) pos += clk neg += nonclk db = sorted(db , key = lambda x:x[0] , reverse = True) #降序 #计算ROC坐标点 xy_arr = [] tp , fp = 0. , 0. for i in range(len(db)): tp += db[i][2] fp += db[i][1] xy_arr.append([tp/neg , fp/pos]) #计算曲线下面积即AUC auc = 0. prev_x = 0 for x ,y in xy_arr: if x != prev_x: auc += (x - prev_x) * y prev_x = x print "the auc is %s."%auc x = [_v[0] for _v in xy_arr] y = [_v[1] for _v in xy_arr] pl.title("ROC curve of %s (AUC = %.4f)" % ('svm' , auc)) pl.ylabel("False Positive Rate") pl.plot(x ,y) pl.show()
结果:(注意:ROC曲线中纵坐标是TP,横坐标是FP,下面的图有误!)
这里的.txt文件格式如:http://kubicode.me/img/AUC-Calculation-by-Python/evaluate_result.txt
形式为:

PS:该txt文件表示的意思是,比如对于第一行就是说:有一个样本得分为0.86...,并被预测为负样本;倒数第一行就是说,这么多测试样本中,有一个样本得分为0.45...,并被预测为正样本;
注意:绘制ROC和PR曲线时都是设定不同的阈值来获得对应的坐标,从而画出曲线
代码中:
nonclick:未点击的数据,可以看做负样本的数量clk:点击的数量,可以看做正样本的数量score:预测的分数,以该分数为group进行正负样本的预统计可以减少AUC的计算量- 代码中首先使用
db = sorted(db , key = lambda x:x[0] , reverse = True) 进行降序排序,然后将每一个从小到大的得分值作为阈值,每次得到一个fpr和tpr(因为最后得分大于阈值,就认为它是正样本,所以若.txt中得分为某一个阈值时nonclk为非0的数,而clk是0,则认为nonclk的值大小的样本是fp样本),最后画出曲线;
对于PR曲线也一样,只不过横坐标换成 ,纵坐标换成
,纵坐标换成 ,AP是其曲线下面积;
,AP是其曲线下面积;
上面的python代码针对二分类模型,但针对多分类模型时一样,即对于每个类都将其看做正样本,其他类看成负样本来画曲线,这样有多少类就画多少条相应的曲线,MAp值即为各类ap值的平均值;
PR曲线的绘制:
这里我们用一张图片作为例子,多张图片道理一样。假设一张图片有N个需要检测的目标,分别是object1,object2,object3共分为三类,使用检测器得到了M个Bounding Box(BB),每个BB里包含BB所在的位置以及object1,object2,object3对应的分数confidence。
我把计算目标检测评价指标归为一下几步:
1,对每一类i进行如下操作:
对M个BB中每一个BB的confidence按从大到小进行排序,同时计算每个BB与N个GroundTruth(GT)的IoU值,且计算每个bbox各自的最大值MaxIoU。设定一个IOU阈值为thresh。针对排好序后的confidence进行循环判断:
(1)当MaxIoU < thresh的时候,fpi = 1,
(2)当MaxIoU>=thresh的时候,若取到MaxIOU的GT BB还没有被匹配过,则tpi = 1。
(3)当MaxIoU>=thresh的时候,若取到MaxIOU的GT BB已经被匹配过,则fpi = 1。
因为在实际预测中,经常会出现多个预测框与同一个gt的IOU都大于阈值,这时通常只将这些预测框中score最大的算作TP,其它算作FP。而我们这里的confidence是从大到小排序的,因此与GT BB第一次匹配的confidence一定大于与它第二次匹配的confidence,因此第一次的为TP,第二次及以后的均为FP。
2,由步骤1我们可以得到3M个分数与tp/fp的元祖,形如(confidencei,tp或者fp),对这3M个元祖按照confidence进行排序(从大到小)。
3,按照顺序1,2,3,4。。。M截取,计算每次截取所获得的recall和precision
recall = tp/N
precision = tp/tp+fp
这样得到M个recall和precision点,便画出PR曲线了~
计算AP值:
由上面得到了PR曲线,即得到了n个(P,R)坐标点,利用这些坐标点我们便可以计算出AP(average precision):
方法一:11点法,此处参考的是PASCAL VOC CHALLENGE的计算方法。首先设定一组阈值,[0, 0.1, 0.2, …, 1]。然后对于recall大于每一个阈值(比如recall>0.3),我们都会得到一个对应的最大precision。这样,我们就计算出了11个precision。AP即为这11个precision的平均值。这种方法英文叫做11-point interpolated average precision。;
方法二:当然PASCAL VOC CHALLENGE自2010年后就换了另一种计算方法。新的计算方法假设这N个样本中有M个正例,那么我们会得到M个recall值(1/M, 2/M, …, M/M),对于每个recall值r,我们可以计算出对应(r’ > r)的最大precision,然后对这M个precision值取平均即得到最后的AP值。
下面给出个例子方便更加形象的理解:
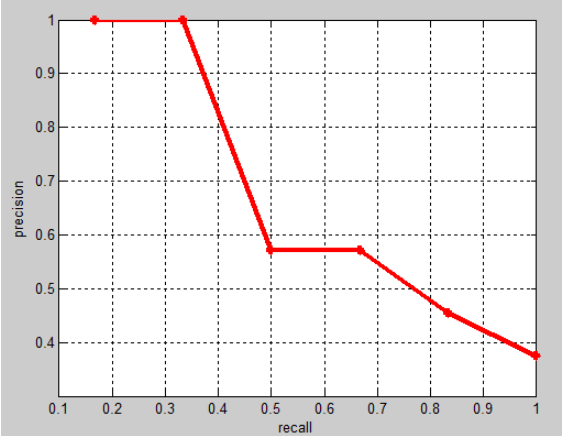
假设从测试集中共检测出20个例子,而测试集中共有6个正例,则PR表如下(top-1到top-20 的得分自上而下从大到小排列):

(1+1+4/7+4/7+5/11+6/16)*(1/6)=0.6621
相应的Precision-Recall曲线(这条曲线是单调递减的)如下:
faster rcnn中计算map的代码:https://github.com/rbgirshick/py-faster-rcnn/blob/master/lib/datasets/voc_eval.py 该代码使用的是方法二。
我看网上关于如何使用该代码并没有做出解释,我这里用voc中的几张图片计算了一下map(自己算法的测试结果,比如说对voc中的cat类,就新建一个cat.txt,其中存储“图片名 矩形框坐标”格式的信息),具体文件在链接:https://pan.baidu.com/s/1336g7ccc4gZ2EKNu9PNndQ 提取码:57yd 中,大家有需要的可以按照这个里面的格式来操作该代码计算map。
AUC和MAP之间的联系:
AUC主要考察模型对正样本以及负样本的覆盖能力(即“找的全”),而MAP主要考察模型对正样本的覆盖能力以及识别能力(即对正样本的“找的全”和“找的对”)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号